DDS实现lora接收
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了DDS实现lora接收相关的知识,希望对你有一定的参考价值。
参考技术A 姓名:张子鹏学号:21181214397
学院:广州研究院
总体框图:
接收端:
1、前导码捕获
接收端对接收到的数据每个码片长度解调一次,解调出的结果放入一个长度为8的队列中。
数据进入接收端后,先在pick_chirp模块每8192(K不同长度也不同)分一个码片,开头加上flag。
rom里存储了去斜的数据,根据接收到的数据进行读取,并一同进入de_chirp模块进行数据去斜,去斜的数据也会输出进行存储preamble7_phi和preamble8_phi。
去斜后的数据进入8192fft模块,经过fft计算出来的频谱数据会通过find_max模块找出最大峰值所在的频谱位置,做为解调结果进入前导码队列。
8个前导码占满队列后,preamble2到preamble8的数据根据preamble1的数据判断是否在范围内,统计范围内的个数,超过6个就判断为检测到前导码,lock置1,同时输出preamble1 。
2、CFO小数部分补偿、粗补偿
这个部分主要是根据前导码捕获模块计算出的数据,对后面的信号进行小数CFO的补偿和粗补偿。
进行前导码捕获时,会将最后两个码片的前导码存入ram中,等lock为1后,先将preamble7_phi码片读出,在读取的过程中同时进行共轭操作,最后和preamble8_phi一起进行小数CFO的计算。
信号在add_cfo模块进行小数CFO补偿。
补偿完的信号在sto_shift模块根据之前计算的preamble8进行粗补偿,补偿完的起始位置加上flag。
3、跳码片判断、精补偿
这个部分主要是根据信号经过两次上下解调峰值的大小不同,判断是否要进行跳码片的操作,同时计算出剩余的补偿值。
粗补偿后的数据,第一个码片经过一次up_chirp解调,第二个码片分成两路,一路进行up_chirp解调,一路进行down_chirp解调,第三个码片进行down_chirp解调。
第二个码片的解调结果,如果up大于down,就跳过一个码片,否则不跳过码片。
根据第一个码片和第三个码片的解调结果计算出精补偿的数值。
4、数据解调
数据解调。
基于stm32的正点原子Lora模块教程
初识LoRa
简单来讲,LoRa就是一种低功耗远程无线通信技术。它是基于Semtech公司SX1276/1278芯片开发的无线数传模块,这种芯片集成规模小、效率高,从而让LoRa模块拥有高接收灵敏度。那么它相比于我们常用的蓝牙和WiFi有什么优势呢?总结而言,就是低功耗、远距离、抗干扰。相同条件下,LoRa模块比WIFI模块传输距离更远。多见的WIFI、蓝牙等近距离无线通信技术,通信距离一般也就只有几十米左右。如果要覆盖某个地区一个城市的网络,部署的成本会很高,不划算。而作为低功耗广域网的LoRa技术,无线通信距离可以达到几公里,甚至十几公里,相对WIFI模块而言,距离要远得多。而这些优势,使得LoRa在现在的物联网中应用广泛,得到了很快的发展。
上手LoRa
本次教程使用的LoRa模块是正点原子的ATK-LORA-01,实物图就长这样:
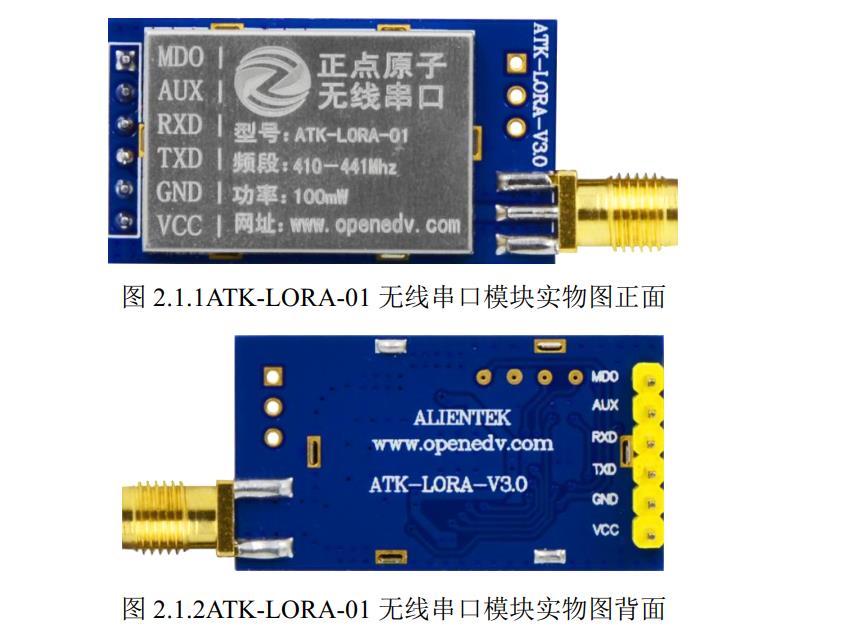
刚开始拿到手一看,不就是个无线串口嘛,写一下串口的数据收发就完事了,应该很快就能调好了。可是最后前前后后调通大概花了我一天时间,这当然得归功于正点那个又臭又长的例程,和讲不明白重点的用户手册。我觉得大家用这些模块肯定是想直接就可以拿来用的,程序应该是很方便移植的那种,可是正点偏不,非要在程序里面加各种各样的显示屏、外设模块,然后写一些复复杂杂的看着就头大的程序。于是我又上网参考了一下别人的程序,结合自己的调试经验,又重新写了LoRa模块的程序,移植十分方便。
拿到一个模块,在编程之前肯定是要看的用户手册和数据手册,先要知道它要怎么用。我把正点给的资料中一些重要的地方(和编程使用模块相关的地方)贴在这里,读者如果还有其他需求可以自行查阅手册。
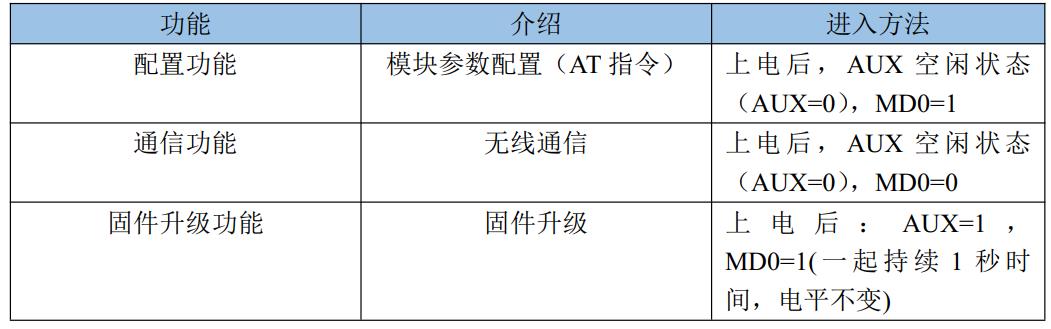
首先便是引脚功能描述:除了串口常见的那四个引脚外,还多了两个引脚。参考它的说明我们可以得出这两个引脚是用于配置模块通信的引脚,因为是无线串口,肯定两个模块得有相同的配置才能通信嘛。

接着就是这两个配置引脚的描述了,它关系到我们如何让模块处于不同的工作状态下:显然,当AUX和MD0引脚都为低电平时,才是模块的通信功能(即两个LoRa模块互相收发数据)。而我们在刚开始给它配对的时候,需要进入配置功能,这时候需要MD0引脚为高电平。然后我们从手册中得知,MD0、 AUX 引脚悬空下为低电平 。
这也就是说,当我们已经配对好两个模块后,我们是可以不用接MD0、AUX这两个引脚的线的,让它们悬空处于低电平两个模块就可以通信了,这样基本就和串口没什么区别了,程序也会相应地简化很多了。
那么如何配对两个模块呢?我个人的建议就是接一个USB转TTL连到电脑上,然后用正点提供的上位机去设置。这样可以不去关心那些AT指令的写法及意义,达到最快速的上手使用LoRa模块。这里连接好后修改模块基本参数配置就好,工作模式配置和发送状态先保持默认。模块参数配置里面两个模块必须都保持一致,我个人建议把通信信道、模块地址可以修改一下,这样可以减少干扰(以防万一嘛)。

一旦我们的模块配对好后,程序的编写逻辑就很简单了,就只是串口的接收和发送了。当然,我们完全可以把模块的配置之类的操作写在程序里,不过试想我们需要再连两个引脚的线,而且多写很多的逻辑控制,为什么不先把它配对好后当个串口用呢?
程序编写
这里我的目的是使stm32和电脑通过两个LoRa模块实现无线通信,并都能显示接收到和发送的数据。MCU端让LoRa使用串口3,然后将串口3接收端的数据通过串口1在电脑上打印出来。
usart3.h的编写:
#ifndef __USART3_H
#define __USART3_H
#include "sys.h"
#define USART3_MAX_RECV_LEN 1024 //最大接收缓存字节数
#define USART3_MAX_SEND_LEN 600 //最大发送缓存字节数
#define USART3_RX_EN 1 //0,不接收;1,接收.
extern u8 USART3_RX_BUF[USART3_MAX_RECV_LEN]; //接收缓冲,最大USART3_MAX_RECV_LEN字节
extern u8 USART3_TX_BUF[USART3_MAX_SEND_LEN]; //发送缓冲,最大USART3_MAX_SEND_LEN字节
extern vu16 USART3_RX_STA; //接收数据状态
void usart3_init(u32 bound); //串口2初始化
void usart3_set(u8 bps,u8 parity);
void usart3_rx(u8 enable);
void u3_printf(char* fmt,...);
#endif
usart3.c的编写:
#include "delay.h"
#include "usart3.h"
#include "stdarg.h"
#include "stdio.h"
#include "string.h"
#include "timer.h"
extern u8 Lora_mode;
//串口接收缓存区
u8 USART3_RX_BUF[USART3_MAX_RECV_LEN]; //接收缓冲,最大USART3_MAX_RECV_LEN个字节.
u8 USART3_TX_BUF[USART3_MAX_SEND_LEN]; //发送缓冲,最大USART3_MAX_SEND_LEN字节
u8 Temp;
//通过判断接收连续2个字符之间的时间差不大于10ms来决定是不是一次连续的数据.
//如果2个字符接收间隔超过timer,则认为不是1次连续数据.也就是超过timer没有接收到
//任何数据,则表示此次接收完毕.
//接收到的数据状态
//[15]:0,没有接收到数据;1,接收到了一批数据.
//[14:0]:接收到的数据长度
vu16 USART3_RX_STA=0;
void USART3_IRQHandler(void)
{
u8 res;
if(USART_GetITStatus(USART3, USART_IT_RXNE) != RESET)//接收到数据
{
res =USART_ReceiveData(USART3);
if((USART3_RX_STA&(1<<15))==0) //接收完的一批数据,还没有被处理,则不再接收其他数据
{
if(USART3_RX_STA<USART3_MAX_RECV_LEN) //还可以接收数据
{
if(!Lora_mode)//配置功能下(启动定时器超时)
{
TIM_SetCounter(TIM7,0); //计数器清空
if(USART3_RX_STA==0) //使能定时器7的中断
{
TIM_Cmd(TIM7,ENABLE); //使能定时器7
}
}
USART3_RX_BUF[USART3_RX_STA++]=res; //记录接收到的值
}else
{
USART3_RX_STA|=1<<15; //强制标记接收完成
}
}
}
}
USART_InitTypeDef USART_InitStructure;
//初始化IO 串口3
//pclk1:PCLK1时钟频率(Mhz)
//bound:波特率
void usart3_init(u32 bound)
{
NVIC_InitTypeDef NVIC_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); // GPIOB时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3,ENABLE); //串口3时钟使能
USART_DeInit(USART3); //复位串口3
//USART3_TX PB10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //PB10
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化PB10
//USART3_RX PB11
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化PB11
USART_InitStructure.USART_BaudRate = bound; //波特率一般设置为9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1; //一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No; //无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART3, &USART_InitStructure); //初始化串口3
USART_Cmd(USART3, ENABLE); //使能串口
//使能接收中断
USART_ITConfig(USART3, USART_IT_RXNE, ENABLE);//开启中断
//设置中断优先级
NVIC_InitStructure.NVIC_IRQChannel = USART3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=2 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
TIM7_Int_Init(99,7199); //10ms中断
USART3_RX_STA=0; //清零
TIM_Cmd(TIM7,DISABLE); //关闭定时器7
}
//串口3,printf 函数 发送端LORA模块发送数据
//确保一次发送数据不超过USART3_MAX_SEND_LEN字节
void u3_printf(char* fmt,...)
{
u16 i,j;
va_list ap;
va_start(ap,fmt);
vsprintf((char*)USART3_TX_BUF,fmt,ap); //使用参数列表发送格式化输出到字符串
va_end(ap);
i=strlen((const char*)USART3_TX_BUF); //此次发送数据的长度
for(j=0;j<i;j++) //循环发送数据
{
while(USART_GetFlagStatus(USART3,USART_FLAG_TC)==RESET); //循环发送,直到发送完毕
USART_SendData(USART3,USART3_TX_BUF[j]);
}
}
//串口接收使能控制
//enable:0,关闭 1,打开
void usart3_rx(u8 enable)
{
USART_Cmd(USART3, DISABLE); //失能串口
if(enable)
{
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;//收发模式
}else
{
USART_InitStructure.USART_Mode = USART_Mode_Tx;//只发送
}
USART_Init(USART3, &USART_InitStructure); //初始化串口3
USART_Cmd(USART3, ENABLE); //使能串口
}
lora.h的编写:
#ifndef __LORA_H
#define __LORA_H
#include "sys.h"
void LoRa_Process(void);
void LoRa_SendData(void);
void LoRa_ReceData(void);
void Lora_Test(void);
#endif
lora.c的编写:
#include "lora.h"
#include "sys.h"
#include "delay.h"
#include "usart3.h"
#include "string.h"
#include "stdio.h"
#include "usart.h"
#include "led.h"
#include "key.h"
//设备工作模式(用于记录设备状态)
u8 Lora_mode=0;//0:配置模式
extern u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.
EXTI_InitTypeDef EXTI_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
//LORA模块发送数据
void LoRa_SendData(void)
{
u8 temp[256] = "Hello Lora !!!";
u3_printf("%s\\r\\n",temp);
}
//Lora模块接收数据
void LoRa_ReceData(void)
{
u16 len=0;
if(USART3_RX_STA&0x8000)
{
len = USART3_RX_STA&0X7FFF;
USART3_RX_BUF[len]=0;//添加结束符
USART3_RX_STA=0;
printf("接收到的数据为");
printf("%s\\r\\n",USART3_RX_BUF);
}
}
//发送和接收数据处理进程
void LoRa_Process(void)
{
u8 key=0;
u8 t=0;
static u8 n = 1;
while(1)
{
if(n==1)
{
printf("按下KEY0发送数据\\r\\n");
n++;
}
key = KEY_Scan(0);
if(key==KEY0_PRES)
{
if(n==2)
{
printf("KEY0已被按下\\r\\n");
LoRa_SendData();//发送数据
printf("数据已被发送\\r\\n");
}
}
LoRa_ReceData();
t++;
if(t==20)
{
t=0;
LED1=~LED1;
}
delay_ms(10);
}
}
void Lora_Test(void)
{
u8 t=0;
u8 key=0;
while(1)
{
printf("按下KEY_UP进入数据测试\\r\\n");
key = KEY_Scan(0);
if(key==WKUP_PRES)
{
printf("进入数据测试\\r\\n");
LoRa_Process();//开始数据测试
}
t++;
if(t==30)
{
t=0;
LED1=~LED1;
}
delay_ms(10);
}
}
main.c的编写:
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "key.h"
#include "led.h"
#include "lora.h"
#include "timer.h"
#include "usart3.h"
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置中断优先级分组为组2:2位抢占优先级,2位响应优先级
delay_init(); //延时函数初始化
uart_init(115200); //串口初始化为115200
usart3_init(115200); //串口3初始化为115200
usart3_rx(1);//开启串口3接收
LED_Init();
KEY_Init();
printf("LORA模块测试程序开始\\r\\n");
Lora_Test();//主测试
}
在移植程序时,只需要将usart.h、usart.c、lora.h、lora.c包含进你的工程里即可。也可以只移植lora.c和lora.h然后将串口3修改为你使用的串口即可。(相比于正点那个复杂庞大的工程,我觉得这些模块还是这样好用)
结果演示
数据发送效果:

数据接收效果:

这里开两个串口助手就可以,一个用于看和MCU相连的LoRa模块的数据,一个用于看和电脑相连的LoRa模块的数据,还是很好理解的。
再见LoRa
需要完整工程代码的以及加LoRa配置代码的私聊我获取即可。助大家都能很快上手LoRa并使用!
以上是关于DDS实现lora接收的主要内容,如果未能解决你的问题,请参考以下文章