什么是“欧几里德范数”(Euclidean norm)?
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了什么是“欧几里德范数”(Euclidean norm)?相关的知识,希望对你有一定的参考价值。
好像也叫“欧几里德长度”……
例如,定义||.||为euclidean norm,那么||x||表示什么呢?x是一个n维向量……
是开平方还是开n次方???
Euclidean范数指得就是通常意义上的距离范数。
比如||X||=ρ(X,0)=Sqrt(X1^2+X2^2+...+Xn^2)

扩展资料
欧几里德为了教学的需要编成了一部“几何学要”。
这部书共分十五卷,第一、二、三、四、六卷都是关于平面几何的。第五卷是关于一般的比例图形。第七、八、九卷是关于算术方面的。第十卷是关于直线上的点。最后五卷则是关于立体几何的。
这部书的材料虽然大部分是前人留下来的,证题方法也多沿用希腊人的,但欧几里德不仅增加了自己的工作,最主要的是建立了严格的几何的体系。他把以前不严格的证明重加论证,再经过一番非常精细的整理和排列。
他整理出的这一套几何体系在几何学中占据了统治的地位达二千多年,那时欧几里德的名字可以说是几何学的同义语。
参考资料来源:百度百科:欧几里德
参考技术AEuclidean范数指得就是通常意义上的距离范数。
比如||X||=ρ(X,0)=Sqrt(X1^2+X2^2+...+Xn^2)
x是n维向量(x1,x2,…,xn),
||x||=根号(|x1|方+|x2|方+…+|xn|方)
补充:开平方,跟几何一样
扩展资料
诱导范数
把矩阵看作线性算子,那么可以由向量范数诱导出矩阵范数 ║A║ = max║Ax║:║x║=1= max║Ax║/║x║: x≠0 ,它自动满足对向量范数的相容性 ║Ax║ ≤ ║A║║x║, 并且可以由此证明 ║AB║ ≤ ║A║║B║。
注:1.上述定义中可以用max代替sup是因为有限维空间的单位闭球是紧的(有限开覆盖定理),从而上面的连续函数可以取到最值。
2.显然,单位矩阵的算子范数为1。
常用的三种p-范数诱导出的矩阵范数是:
1-范数:║A║1 = max ∑|ai1|, ∑|ai2| ,…… ,∑|ain| (列和范数,A每一列元素绝对值之和的最大值) (其中∑|ai1|第一列元素绝对值的和∑|ai1|=|a11|+|a21|+...+|an1|,其余类似);
2-范数:║A║2 = A的最大奇异值 = ( max λi(A^H*A) ) ^1/2 (欧几里德范数,谱范数,即A^H*A特征值λi中最大者λ1的平方根,其中A^H为A的转置共轭矩阵);
∞-范数:║A║∞ = max ∑|a1j|, ∑|a2j| ,..., ∑|amj| (行和范数,A每一行元素绝对值之和的最大值) (其中为∑|a1j| 第一行元素绝对值的和,其余类似);
其它的p-范数则没有很简单的表达式。
对于p-范数而言,可以证明║A║p=║A^H║q,其中p和q是共轭指标。
简单的情形可以直接验证:║A║1=║A^H║∞,║A║2=║A^H║2,一般情形则需要利用║A║p=maxy^H*A*x:║x║p=║y║q=1。
参考资料:百度百科 范数
参考技术B设E为欧几里得向量空间. 使E的任一向量x对应其纯量平方的平方根的映射x↦...是E上的一种范数,称为欧几里得范数.
欧几里德范数
主条目:欧几里德距离
在n维欧几里德空间Rn上,向量x =(x1, x2,
..., xn)的最符合直觉的长度由以下公式给出
根据勾股定理,它给出了从原点到点x之间的(通常意义下的)距离。 欧几里德范数是Rn上最常用的范数,但正如下面举出的,Rn上也可以定义其他的范数。然而,以下定义的范数都定义了同一个拓扑结构,因此它们在某种意义上都是等价的。
扩展资料:
欧几里德为了教学的需要编成了一部“几何学要”。
这部书共分十五卷,第一、二、三、四、六卷都是关于平面几何的。第五卷是关于一般的比例图形。第七、八、九卷是关于算术方面的。第十卷是关于直线上的点。最后五卷则是关于立体几何的。
这部书的材料虽然大部分是前人留下来的,证题方法也多沿用希腊人的,但欧几里德不仅增加了自己的工作,最主要的是建立了严格的几何的体系。他把以前不严格的证明重加论证,再经过一番非常精细的整理和排列。
他整理出的这一套几何体系在几何学中占据了统治的地位达二千多年,那时欧几里德的名字可以说是几何学的同义语。
参考资料:范数
参考技术C1、欧几里得范数指得就是通常意义上的距离范数。例如在欧式空间里,它表示两点间的距离(向量x的模长)。
2、||x||表示向量的长度,计算方法依然是向量各个元素模的平方之和再开方。

扩展资料:
欧式范数的定义式为:

类似的形式一般化后,就是所谓p-范数,其定义式为:
特别地,有∞-范数,其定义式为:

对于这些范数,有以下的不等式成立:

欧式范数其实就是三维空间距离向欧式空间的延伸。
参考资料:
范数——MathWork中国
||x||=根号(|x1|方+|x2|方+…+|xn|方)
补充:开平方,跟几何一样本回答被提问者采纳
论文学习-Euclidean Distance Matrices-theory,algorithms,applications
翻译自Euclidean Distance Matrices: Essential theory, algorithms, and applications
EDMs是点之间的平均距离矩阵。该文的目标是介绍EMD在信号处理领域的应用,展示EDM如何被用来设计算法--对距离数据进行修复和去噪。同时,介绍了其在麦克风的位置校准(microphone position calibration)、超声波断层扫描(ultrosound tomography)、room reconstruction from echoes以及相位恢复的应用。
引言
假设你有一份瑞士火车时刻表但是没有其地图,但是这足够去重建一份阿尔卑斯的粗略的地图,即便火车时间不能体现距离甚至部分时间点是不知道的。
我们经常处理距离数据因为它们是容易测量和评估的。比如说,在无线传感器网络,传感器节点可以测量由其它节点传送过来的信号包的强度或由它们的邻节点发送的脉冲到达时间(TOA),这属于自我定位(self-localization)。
有时候数据不是矩阵的,但是我们可以像心理测验学一样寻找一个矩阵表示。实际上,心理测验学是很多跟EDM有关的方法形成的起源,包括多维标度分析(MDS)--用多维空间中的点表示不同刺激物之间的感知或心理测量关系(百度)。
EDM是对点集的一个有用的描述和算法设计的好起点。一个经典的任务就是恢复原始点设置:它仅仅需要对一个对称矩阵进行特征值分解(EVD)。事实上,大部分欧几里德距离问题重建点集伴随着以下问题:
1)距离数据有噪声
2)一些距离数据缺失
3)距离无法识别(unlabelled)
距离几何有两个基本问题:一是给定一个矩阵,判断它是否是EDM;二是给定一些不完整的距离数据,在已知嵌入维数下--形成点的最小仿射空间的维度--判断是否存在一种点配置(configuration of points)
FroM PoIntS to EdMs And BAcK
X为d*n矩阵,
xi和xj之间的平均距离为 ,并定义
,并定义
||.||表示欧几里德范数,即

1表示n*1的列向量,即[1 1 1...1 ]的转置,1的转置即1*n的行向量;edm(X)实际就是
类似地,令 ,则
,则
公式3和4揭示了一个重要的属性:X的秩最多为d,的秩也最多为d,公式3的另外两个加数秩为1,由此可得:一个EDM的秩最多为d+2 (T1)
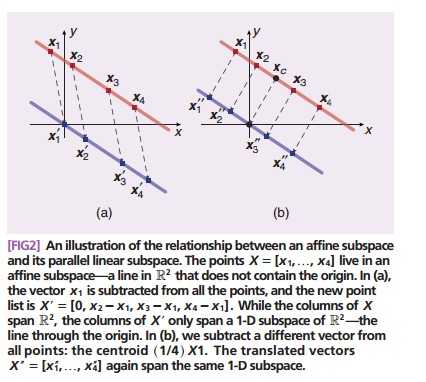
这个定理说明EDM的秩和其点的数目无关,在许多应用中,d是3或者更少然而n可以是上千。根据定理1,这样的矩阵秩最多为5。定理1中最重要的是点集的仿射维数。任何仿射子空间都是一个线性子空间的转变,即重要的唯一性(essential uniqueness)。如下图所示,从一个仿射子空间的所有点中取出任意一点可唯一地描述一个包含零向量的平行线性子空间。
ESSENTIAL UNIQUENESS
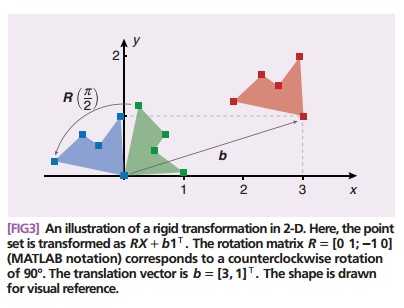
当处理一个逆问题时(inverse problem),我们需要明白哪些是可重获的哪些是已丢失的。重建点配置通常会增加其规模(size),成对距离的数量远比坐标描述的规模大,即 。很明显刚性变换不改变固定点的距离,就像我们从公式3和4中得知的:edm(X)=,故用代数方法(翻转、反射)不会改变距离。因此对于旋转点集
。很明显刚性变换不改变固定点的距离,就像我们从公式3和4中得知的:edm(X)=,故用代数方法(翻转、反射)不会改变距离。因此对于旋转点集 (Q为d*d的正交矩阵,即
(Q为d*d的正交矩阵,即 ):
):
通过d*1的列向量b得到平移矩阵
因此
这说明我们无法只通过距离数据得到点的具体位置,不同的重建步骤会得到不同的点配置,如下图所示:
RECONSTRUCTION THE POINT SET FROM DISTANCE
公式3给了我们一种从距离矩阵中计算点配置的方法。
假设点x1是原点,D的第一列包含了点向量的平方范数,d1是D的第一列,即
由于的对角线元素恰好是 ,则
,则

由于G是对称半正定矩阵(PSD), ,其中
,其中
所以 ,
, 即为重建点配置,
即为重建点配置, 。
。
于是,我们有定理2:当且仅当对任何满足条件 的s
的s
 是一个PSD时,D是一个EDM。
是一个PSD时,D是一个EDM。
很容易得知,s=e1。 平移点集使得x1被平移到原点,通过对edm(x)左乘矩阵
平移点集使得x1被平移到原点,通过对edm(x)左乘矩阵 右乘矩阵
右乘矩阵 ,我们将最终得到
,我们将最终得到 ,重建点配置将在原点有第一个点(have the first point at the origin)。
,重建点配置将在原点有第一个点(have the first point at the origin)。
另一方面,s=(1/n)1时,坐标系的原点将是点集的质心,因此矩阵 被称为几何中心矩阵
被称为几何中心矩阵
为说明这一点,我们定义X的质心为所有点集的平均值
然后从点集中减去这一向量,即
以上是关于什么是“欧几里德范数”(Euclidean norm)?的主要内容,如果未能解决你的问题,请参考以下文章