星载遥感探测器对大气成分进行光谱分析的方法,原理
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了星载遥感探测器对大气成分进行光谱分析的方法,原理相关的知识,希望对你有一定的参考价值。
如题,主要是关于探测器的资料,光谱分析的原理,遥感对象组要是二氧化碳,臭氧,痕量气体等,越前沿越好~
遥感技术具有监测范围广、速度快、成本低,且便于进行长期的动态监测等优势, 还能发现有时用常规方法难以揭示的污染源及其扩散的状态, 它不但可以快速、实时、动态、省时省力地监测大范围的大气环境变化和大气环境污染, 也可以实时、快速跟踪和监测突发性大气环境污染事件的发生、发展, 以便及时制定处理措施, 减少大气污染造成的损失。因此,遥感监测作为大气环境管理和大气污染控制的重要手段之一, 正发挥着不可替代的作用。<BR>1 大气环境遥感监测技术的基本原理遥感监测就是用仪器对一段距离以外的目标物或现象进行观测,是一种不直接接触目标物或现象而能收集信息,对其进行识别、分析、判断的更高自动化程度的监测手段。它最重要的作用是不需要采样而直接可以进行区域性的跟踪测量,快速进行污染源的定点定位,污染范围的核定,污染物在大气中的分布、扩散等,从而获得全面的综合信息。根据所利用的波段, 遥感监测技术主要分为紫外、可见光、反射红外遥感技术;热红外遥感技术和微波遥感技术三种类型。<BR>大气环境遥感监测作为遥感技术应用中较为重要的内容之一,在业务上不同于常规气象要素的监测。常规气象要素遥感监测[1 ] 主要是指测量大气的垂直温度剖面、大气的垂直湿度剖面、降水量及频度、云覆盖率(云量和云层厚度) 和长波辐射、风(风速和风向) 、地球辐射收支的测量等。而大气环境遥感则是监测大气中的臭氧(O3 ) 、CO2 、SO2 、甲烷(CH4 ) 等痕量气体成分以及气溶胶、有害气体等的三维分布。这些物理量通常不可能用遥感手段直接识别,但由于水汽、二氧化碳、臭氧、甲烷等微量气体成分具有各自分子所固有的辐射<BR>和吸收光谱特征,如影响水汽分布的主要光谱波长在017μm , O3在0155~0165μm 之间存在一个明显的吸收带等,因此我们实际上可通过测量大气散射、吸收及辐射的光谱特征值而从中识别出这些组分来。研究表明,在卫星遥感中,有两个非常好的大气窗可以用来探测这些组分,即位于可见光范围内的0140~0175μm 的波段范围和在近红外和中红外的0185μm、1106μm、1122μm、1160μm、2120μm 波段处。<BR>2 大气环境遥感监测技术的应用<BR>大气环境遥感监测技术按其工作方式可分为被动式遥感监测和主动式遥感监测,被动式遥感监测主要依靠接收大气自身所发射的红外光波或微波等辐射而实现对大气成分的探测;主动式遥感监测是指由遥感探测仪器发出波束、次波束与大气物质相互作用而产生回波,通过检测这种回波而实现对大气成分的探测。由于主动式大气探测仪器既要发射波束,又要接收回波,通常将这种方式称为雷达工作方式。根据遥感平台的不同,大气环境遥感监测又可分为天基、空基遥感和地基遥感。天基、空基遥感是以卫星、宇宙飞机、飞机和高空气球等为遥感平台,地基遥感则是以地面为主要遥感平台。本文将根据大气环境遥感监测技术的工作方式和遥感平台的不同,从四个方面来介绍大气环境遥感监测技术在实际中的应用。<BR>2. 1 大气环境的被动式空基遥感监测<BR>目前利用被动式空基遥感对大气环境监测主要包括:对臭氧层的监测,对大气气溶胶和温室气体如CO2 、甲烷(CH4 ) 的监测,对大气主要污染物、大气热污染源以及突发性大气污染事故如沙尘暴等的监测。大气环境污染主要体现在大气污染物上,大气污染物的种类约有数千种,已发现有危害作用而被人们注意到的有一百多种,其中大部分为有机物。本文为了论述的方便,将大气污染的主要污染物按污染区域及污染性质分为三大类,第一类为区域性污染的大气污染物,主要有二氧化硫、氮氧化物、大气颗粒物(包括可吸入颗粒物) 、有机污染物等;第二类为灾害性大气污染,如沙尘暴、有毒气体的泄漏等;第三类为在全球变化中起着不可忽视作用的污染物,如对流层气溶胶、臭氧(O3 ) 、CO2 、甲烷(CH4 ) 等。本文将针对以上三大类污染物来介绍被动式空基遥感在大气环境监测中的应用。<BR>21111 区域性大气污染物的被动式空基遥感监测<BR>利用遥感对大气环境进行监测的其中一个方面是对区域性大气污染物的监测,然而区域性大气污染信息是叠加于多变的地面信息之上的微弱信息,这些物理量通常不可能用遥感手段直接识别,提取非常困难,一般的地物提取方法均不实用。目前常用的方法主要有两类,一类是根据污染地区地物反射率发生变化,边界模糊的情况来对大气污染情况进行估计[2 ,3 ] ; 另一类是间接方法,主要根据树叶中SO2 等污染物含量与遥感数据中植被指数的关系估计大气污染的情况[4 ] 。王雪梅、邓孺孺等[5 ] 分析了卫星遥感像元信息构成的物理机制, 将像元信息概化为土壤、植被、水体等基本信息类型的线性集合与污染气体( SO2 ,NOx) 信息的简单叠加,首次从TM 卫星数据直接定量提取珠江口地区大气污染气体累加浓度信息。实验结果表明,所提取的污染信息满足精度要求。有学者[6 ,7 ] 用红外航片资料研究了环境污染区与植被的响应关系,指出受污染杨树与正常健康的杨树相比,光谱发射率在近红外波段(017~111) 有较大幅度的下降,而在红波段(016~017) 则有所增加,叶绿素指数也迅速减少,因此叶绿素指数可成为反映大气污染的一个重要指标。<BR>L. BRUZZONE[8 ] 等利用搭载在ERS - 2 卫星上的GOME 和ATSR - 2 传感器所接收到的数据,通过两种方法对生物燃烧排放到对流层中的NO2进行了计算,一种是假设这两种传感器所获得的数据与NO2浓度之间存在线性关系;另外一种是用基于辐射传输方程神经网络的非线性无参数方法来反演NO2 浓度。实验结果表明,这两种方法在实际反演NO2 浓度时效果较好。S. CORRADINI 等人[9 ] 根据aster 数据, 利用劈窗算法( the split2window technique) 计算了意大利Mt Etna 火山排放的SO2 ,试验证明,运用该方法可较为准确地计算出SO2的分布。<BR>21112 灾害性大气污染———沙尘暴的被动式空基遥感监测<BR>利用遥感技术对大气环境进行监测的另一个方面是对大气污染事故的监测,如对沙尘暴的监测。沙尘暴是严重的生态环境问题,同时也是严重的大气污染问题,它突发性强,危害巨大,当沙尘暴发生时,大量沙尘粒子悬浮于空中并随风移动,对人畜及环境造成极大危害。沙尘暴属于大气气溶胶的一种极端情况。在气象学中,沙尘暴<BR>是指强风从地面卷起大量沙尘,使空气很浑浊,水平能见度小于110km 的灾害性天气现象。周明煜等[10 ] 利用NOAAPAVHRR 资料分析了1993 年4月北京、天津上空沙尘暴特性,得到在沙尘暴发生时,AVHRR 可见光通道1 和可见光通道2 的反射率都有增加,沙尘暴强度越大,反射率增加越大,但仅给出了反射率增加的大小,而没有根据卫星反射率的变化对沙尘暴进行定量研究。目前对沙尘暴的遥感监测主要是利用GMS 和NOAAPAVHRR 数据,其研究表明, GMS 的红外通道数据有利于确定沙尘暴的位置,同时它所具有的高时间分辨率(1h) ,更有利于大尺度监测沙尘暴的运动轨迹[11~14 ] 。由于NOAAPAVHRR 数据不但可以监测到沙尘暴反射辐射特性[15 ,16 ] ,而且可以在较大尺度上监测到沙尘暴的时空分布[11 ,12 ] ,因此是目前沙尘暴研究和监测的主要遥感信息源。<BR>21113 影响全球大气环境污染物的被动式空基遥感监测在大气环境研究方面,世界各国科学家、政府及相关机构,不仅关注于局地性的大气环境,而且更注重于全球大气环境的质量,如温室气体效应、全球臭氧空洞以及气溶胶的直接、间接气候强迫效应等导致的全球变化。自1978 年以来,科学家们利用搭载在Nimbus - 7 卫星上的臭氧制图光谱仪(TOMS) 对大气中臭氧进行了卫星观测,开创了利用遥感手段对全球变化进行研究的先河。<BR>Varotsos 等[17 ] 利用1979~1992 年13 年的Nimbus- 7TOMS 遥感数据分析了希腊上空的臭氧衰减,研究结果表明, 其上空的臭氧衰减率为每年018 %;日本[18 ] 于1996 年发射的ADEDS - Ⅱ卫星上搭载有温室气体干涉监测仪,可提供全球大气中的CO2 、CH4 和CFCS 等温室气体的遥感监测数据。此外,利用ERS - 2 上搭载的全球臭氧监测实验装置(GOMZ) 和大气制图学P化学扫描成像吸收光谱仪(SCIAMACHY) 可对CO 和O3体积浓度进<BR>行全球制图[19 ] 。<BR>气溶胶不仅影响全球变化,而且也是影响区域大气环境质量的主要因素,因此,本文将重点介绍被动式空基遥感在气溶胶监测中的应用以及探测气溶胶的卫星传感器的发展历程和特点。<BR>在对气溶胶的遥感监测方面,高分辨率的卫星遥感不但提供了监测大气气溶胶的可能性,而且还弥补了一般地面观测难以反映气溶胶空间具体分布和变化趋向不同的缺陷,为全球和区域气候的研究以及城市污染的分析提供了丰富的研究资料。气溶胶是指悬浮在大气中的各种液态或固态微粒,通常所指的烟、雾、尘等都属于气溶胶,它对大气中发生的许多物理化学过程有着重要的影响。气溶胶有众多的自然源和人为源,但基本上可分为陆源气溶胶和海源气溶胶两种。国际上卫星遥感气溶胶的研究开始于二十世纪70 年代中期,我国科学家从80 年代中期开始也进行了这方面的研究。1986 年赵柏林等[20 ] 利用NOAAPAVHRR 资料,对海上大气气溶胶进行了研究,由于是研究的尝试阶段,仅对渤海上空一个点进行了测量,结果表明,对气溶胶浓度计算所达到的精度可以满足气候和环境研究的需要。刘莉[21 ] 利用GMS - 5 可见光通道研究了湖面上空气溶胶光学厚度,试验证明了该方法的可行性。毛节泰、李成才等利用MODIS 资料和地面多波段光度计资料对整个中国、中国东部地区及四川盆地等地的气溶胶特性做了大量的研究工作,并取得了一定的成果。国际上在利用卫星资料研究气溶胶方面<BR>作了很多的工作,尤其是在利用气溶胶光学特性并根据其路径散射光谱进行反演方面。目前,国外对气溶胶进行反演的方法主要有8 种,即单通道反射率反演法、多通道反射率反演法、基于稠密或暗色植被区的黑体反演法、陆地上空对比度削减法、热对比法、陆地—海洋对比法、反射率角度分布法及极化方法。Griggs[22 ,23 ] 发现在海洋表面上空垂直反射出去的太阳辐射值随气溶胶光学厚度的变化而近于线性增加,基于此线性关系建立了海上气溶胶光学厚度单通道反演方法,但这种方法仅限于用在如海洋等低反射率表面的情况,因为当地表反射率较大时,这种线性关系不能很好成立。Mekler 等[24 ] 在辐射传输方程的基础上,利用地球资源观测卫星( ERTS) 反演了气溶胶含量,效果较好。Yoramj 等[25 ] 提出一种能在地表反射率有变化的区域(如水陆交界处) 运用的反演算法,这种算法对辐射传输方程进行了近似,适用于平面平行大气,可用波长范围限于014~018μm;<BR>Kaufman[26~28 ] 等通过大量飞机试验发现,对于植被密集的具有较低反照率的地表, 2113μm 近红外通道反照率和0147μm、0166μm 可见光通道反射率相关较好,此方法已成功地运用于MODIS 的气溶胶反演。<BR>随着卫星技术的发展,监测气溶胶属性用的卫星传感器也在不断的发展。过去(1981~1998年) 对气溶胶光学厚度的反演使用最多的卫星传感器是搭载在NOAA 卫星上的AVHRR ,主要工作是利用它的第一通道(0163μm) 进行海洋上空气溶胶光学厚度的监测。该传感器本身具有很多缺点,如可见光波段没有进行星上校正等[29 ] 。为了避免太阳光的直射,自1981 年以来,反演海上气溶胶光学厚度仅使用午后极轨卫星(NOAA - 7 ,NOAA - 9 ,NOAA - 11 ,NOAA - 14) ,且人们对海洋上空气溶胶性质的了解主要来自于对其单通道的反演(Rao etal . 1989 ; Stowe et al . 1997) 。之后人们对气溶胶性质的研究逐渐转为使用搭载在Nimbus - 7 上的TOMS 传感器,该传感器对气溶胶吸收特性比较敏感,但是在气溶胶定量分析和确定气溶胶层的高度方面具有很大的不确定性(Torres et al . 1998) 。1995 年,欧洲空间局( ESA)发射了一种新型的多角度传感器ATSR ,搭载于ERS - 2 卫星上,利用这种传感器可以对全球的气溶胶光学特性进行研究,它的波段范围与AVHRR相似,但是它有两个不同的扫描角,因而对气溶胶反演精度有了很大的提高。1996 年日本发射了自己的第一颗地球观测卫星(Advanced Earth<BR>Observation Satellite - ADEOS) ,该卫星上搭载的传感器有由CNES 和法国空间局提供的辐射偏振探测器( POLDER) ,这是一种敏感的OCTS 传感器。<BR>POLDER 辐射偏振探测器是第一个针对海陆气溶胶进行反演而设计的传感器,OCTS 传感器主要是对海温和水色遥感而设计的,它可以倾斜,在热带地区可以避免太阳光的照射,OCTS 传感器现在已经成功地应用于对海面气溶胶的反演, 但POLDER和OCTS 传感器都没有进行星上校正。1997 年NASA 和OrbImage 发射了SeaWiFs 传感<BR>器,该传感器是商业用的,通过它可获得全球的水色数据,然后提供给全世界的渔民,同时也可被用来对海洋上空气溶胶光学厚度进行反演,该传感器没有热红外波段,也没有星上校正,其主要缺点是波段较窄,很难穿透云层。1999 年,NASA 成功发射了地神Terra 卫星后,对对流层气溶胶遥感能力有了较大的提高,他们还特别针对气溶胶设计了两个传感器:MODIS 和MISR。MODIS 是一个具有中等空间分辨率(250~1000m) ,由36 个通道成像分光计构成的传感器,而且进行了精确的辐射校正。MODIS 突出的特点之一就是可利用17 个波段来区分出云、阴影、浓气溶胶和火灾(Ackerman et al . 1998 ; King etal . 1998) ;MISR 是四通道CCD 阵列,提供了九个单独观测角度的传感器,利用该传感器获得的数据能够反演海洋和陆地上空气溶胶光学厚度和气溶胶类型。2000 年发射的Envisat - 1 是欧洲空间局( ESA) 的一颗高级环境卫星, 上面携带的传感器是AATSR 和MERIS。AATSR 类同于ATSR - 2 ,MERIS 传感器采用的是推扫式仪器,能够在15 个波段上收集数据。NASDA 于2000 年发射了ADEOS - Ⅱ卫星,上面携带的传感器是POLDER 和GLI ,GLI 传感器类同于MODIS ,利用GLI 的数据能够对海洋和陆<BR>地上空气溶胶进行反演。2002 年,NASA’S EOSCHEM卫星携带OMI 升空,该传感器也被认为能用来反演陆地及海洋上空的气溶胶,该传感器类同于TOM传感器,只是空间分辨率有了较大的提高。<BR>212 大气环境的主动式空基遥感监测<BR>目前,大气环境的主动式空基遥感监测主要是星载或机载的微波雷达。此外,还有微波高度计和微波散射计。主动式雷达是由发射机通过天线在很短的时间内向目标物发射一束很窄的大功率电磁波脉冲,然后用同一天线接受目标地物反射的回波信号而进行显示的一种传感器。不同物体,回波信号的振幅、位相不同,故接受处理后,可测出目标地物的方向、距离等数据。目前,许多国家都制定了空间雷达探测计划, 美国NASA 于1993 年首先利用机载的探测雷达监测了大气中气溶胶的分布,1998 年NASN 再次利用载有雷达的极轨卫星测量了大气中的气溶胶、水汽、臭氧等成分;1994 年,Bourdon. A[30 ] 在希腊雅典利用机载差分吸收雷达测量了该市上空的光化学雾,获得了一些大气污染物空间分布数据,如SO2 、NO2 、臭氧和气溶胶等的分布。胡顺星等[31 ] 利用激光雷<BR>达对对流层2~4km 高度范围的臭氧分布进行了测量, 结果表明, 用YAG 激光产生的两个波段(266nm 和289nm) ,可以得到比较精确的臭氧分布。刘金涛等[32 ] 采用高光谱分辨率激光雷达(HSRL) 系统,同时测量了大气风和气溶胶的光学特性,取得了较好的效果。<BR>213 大气环境的被动式地基遥感监测<BR>以上介绍的大气环境遥感监测主要是以卫星或航天飞机为遥感平台的主动、被动式遥感监测,地面上的遥感监测也是大气环境遥感的重要组成部分。目前大气环境的被动式地基遥感监测主要有:太阳直接辐射的宽带分光辐射遥感、微波辐射计遥感、多波段光度计遥感、根据天空散射亮度分布遥感、全波段太阳直接辐射遥感和华盖计遥感等。太阳直接辐射遥感是利用日光在大气中的衰减和散射来测量大气组分的,它通过对可见光的<BR>测量来反演气溶胶,利用紫外线波段来测量大气臭氧、二氧化碳等[33 ] ;由于大气分子的吸收辐射在很宽的频率范围内产生特定的谱线,且不同分子及不同的能级跃迁产生的谱线不同,微波辐射计就是通过接受这些不同的辐射频率信号来反演大气组分的。利用微波辐射计可测量大气臭氧和氯化物,它测量的大气臭氧精度和地基陶普生光谱仪测量精度相当;此外微波辐射计还可测量大气衰减,它可以得到精确的大气消光系数,这在大地测量、制导和电波通信中是相当重要的[34 ] 。多波段光度计遥感是一种以太阳为光源的被动式地基遥感手段,自大气上界入射到地气系统的太阳辐射受到大气中气体分子以及大气气溶胶粒子的散射和吸收,在地面接收到的太阳辐射包含了大气中气溶胶信息,通过测量接收到的辐射就可以反演出气溶胶的信息。利用多波段光度计遥感气<BR>溶胶光学厚度是目前气溶胶遥感手段中最准确的方法,通常被用来校验卫星遥感的结果,如NOAA为验证利用第一代AVHRR 卫星测量海洋上空气溶胶方法的准确性,曾经在10 个沿岸和岛屿观测点及观测船上利用多波段光度计对气溶胶进行了测量,并通过比较两种遥感结果的一致性来验证卫星遥感的准确性[35 ] 。毛节泰等[36 ] 在利用多波段光度计测量气溶胶方面作了一些研究工作,如利用MODIS 卫星资料测量了北京地区的气溶胶光学厚度,同时与利用地面光度计测量的结果进行了比较,试验证明,两种方法的测量结果比较接近,这说明了利用卫星遥感监测气溶胶是一种地基遥感监测较好的替代方法,它可以弥补地基遥感地面观测空间覆盖不足的缺陷。刘桂青[37 ] 等2002 年在浙江临安进行了地面光度计以及粒子谱的观测,将观测结果与MODIS 的气溶胶产品和空气污染指数(API) 进行了对比,发现两者间具有很好的相关性。<BR>214 大气环境的主动式地基遥感监测<BR>目前,大气环境主动式遥感监测主要是地基遥感监测,典型的主动式大气遥感探测仪器有二十世纪40 年代发明的微波气象雷达和60 年代发明的大气探测激光雷达。用于大气探测的激光雷达是历史上出现最早的激光雷达,也是目前应用最为广泛的一种激光雷达(Hinkley et al . , 1976 ;Measures et al . , 1988) 。激光波束的波长,可与大<BR>气中的任何原子、分子发生共振而产生回波,不存在大气探测的盲区,它主要用于测量大气的状态、大气污染成分和平流层物质等大气中物质的物理性质及其空间分布特征等。根据它测量的物质种类和目标的不同,可分为米氏激光雷达、瑞利激光雷达、荧光雷达、喇曼激光雷达、差分光激光雷达、多普勒雷达等(表1) 。邱金桓等[38 ] 于1982 年5月首次用激光雷达监测了沙尘暴的消光特性,由于当时所用的激光雷达功率较小,只探测到垂直<BR>高度大约2km 范围,结果表明,沙尘暴发生时气溶胶光学厚度可以有一个量级的变化;他们[39 ] 又对1988 年4 月发生的沙尘暴进行的激光雷达探测,垂直高度达到了6km 以上,揭示出沙尘暴垂直结构依赖于风场结构。1986 年,杨舒等[40 ] 从理论上研究了利用多波段激光雷达反演气溶胶粒子谱和复折射率的方法。中国科学院安徽光机所自1995 年起就利用自己研制的523 和1064 nm 双波长激光雷达,对大气气溶胶的水平和垂直消光特性进行了探测,积累了大量的数据,并得到了不同大气条件下典型的气溶胶垂直分布廓线和气溶胶指数的特征。石广玉等[41 ] 与日本合作在西藏拉萨等地也开展了短期激光雷达测量气溶胶的工作。<BR><IMG onmousewheel="return bbimg(this)" style="WIDTH: 584px; HEIGHT: 150px" height=224 src="/hjjc/UploadFiles_2592/200611/20061119180335623.jpg" width=861 onload=javascript:resizepic(this) border=0><BR>3 存在的问题及其展望<BR>目前,遥感技术正从单一遥感资料的分析,向多时相、多数据源(包括非遥感数据资料数据) 的信息复合与综合分析过渡。从对各种事物的表面性的描述,向内在规律分析、定量化分析过渡,就大气环境遥感而言,有待于在以下几方面加强研究:<BR>(1) 大气环境遥感的定量化、集成化、系统化和全球化。“定量化”是大气环境遥感研究的永恒主题,也是大气环境遥感中的关键技术之一,解决这一问题的基本前提是建立起大气环境遥感监测的指标体系,许多后续的定量研究工作将依附于所建立的指标体系。大气环境遥感的定量化对大气环境遥感技术集成、应用及系统化有重要意义。这里的集成有两方面的意思,一是时间和空间上不同数据源的互补和综合;二是互为约束或附加<BR>条件的遥感反演技术。地球观测系统( EOS) 是划时代的长期发展的伟大工程,也是一项系统工程,该工程对环境与气候变迁、全球变化、可持续发展研究等有极其重要的意义。大气遥感在EOS 中占有重要地位,而现有的大气遥感尤其是大气环境遥感的“定量化”和系统化水平远不能满足环境与气候变迁要求。<BR>(2) 大气环境的主动和被动式卫星遥感的一体化。从现有国外研究资料来看,卫星遥感技术在大气环境保护、监测及预测领域中的应用是不可替代的,探测大气环境的遥感器也将随着卫星探测技术的发展而不断改进。二十世纪是被动式卫星遥感时代,主要以卫星为遥感平台,而二十一世纪将是主动、被动式大气环境遥感各领风骚的<BR>时代,主动式遥感有激光雷达、微波雷达、GPS 等,这些探测技术具有高技术、多功能、高探测分辨率和高探测精度等优点,可以将它们同卫星集成在一起,也可将它们作为卫星遥感数据的补充数据源或地面校验数据。<BR>(3) 高光谱、高时间、高空间及多角度、多时相、多偏振等多种数据源的综合应用。从国内外学者对大气环境遥感监测的研究情况来看,其对研究大气环境遥感所用的数据源的要求很高,不仅仅只局限于使用陆地卫星数据等单一数据源,还需要高光谱分辨率、高空间分辨率或高时间分辨率的卫星遥感数据源。<BR>(4) 高性能传感器的研制。重点发展能够选择监测某种或某类优先污染物(如氯苯和硝基苯等) 浓度的遥感器。<BR>(5) 建立自己的大气环境遥感监测业务化运行系统,以便更好地为环境管理决策服务。<BR>当前,大气环境遥感监测技术应依托我国的对地观测技术和对地观测系统的发展计划,同时充分利用国际上资源环境卫星系统,开展广泛的国际合作和交流,大力发展我国的大气环境遥感监测技术,并充分利用现有的环境监测网点和常规监测方法,采用遥感技术与地面监测相结合的方法,建立我国的大气环境遥感监测系统。 参考技术A www.eptec.cn/hjjc/dqjc/2006-11-19/596.html参考资料:www.eptec.cn/hjjc/dqjc/2006-11-19/596.html
本回答被提问者采纳基于光谱-空间残差网络模型的高光谱遥感图像分类
作 者 信 息
韦春桃,肖博林,李倩倩,白 风,卢志豪
(重庆交通大学 土木工程学院,重庆 400074)
【摘要】残差网络是近几年提出的一种新型深度卷积网络,通过增加网络深度提高分类的准确率,也解决了网络退化问题。基于残差学习原理,设计了针对高光谱遥感图像分类的光谱-空间残差网络模型。首先,将原始高光谱遥感数据三维立方体输入网络模型,并使用特定的卷积核对光谱特征进行降维;然后,利用光谱残差模块和空间残差按模块分别且连续地学习光谱和空间特征;最后,对提取到的特征进行池化操作并分类。此外,为规范训练数据和防止过拟合,学习过程中使用了批量归一化和dropout的方法。所设计网络模型在Indian Pines和Pavia U数据集上进行了验证实验,结果表明,所提方法有效地缓解了网络退化的问题,且在分类精度上也高于支持向量机、卷积神经网络等现有算法。
【关键词】高光谱遥感图像分类;残差网络模型;特征提取;批量归一化;dropout
【中图分类号】P237 【文献标识码】A 【文章编号】1672-1586(2020)03-0042-07
引文格式:韦春桃,肖博林,李倩倩,等. 基于光谱-空间残差网络模型的高光谱遥感图像分类[J].地理信息世界,2020,27(3):42-48.
正文
0 引 言
高光谱遥感又称成像光谱遥感,是将成像技术和光谱技术相结合的多维信息获取技术。高光谱遥感数据因其有着丰富的光谱信息和地物空间分布信息,极大地提高了识别和区分各类地物的能力。目前,高光谱遥感已在社会生活各个方面都凸显出了巨大的研究潜力,在精细农业、地质调查、生态建设、海洋遥感、军事侦察等方面具有重要的研究价值和意义。
基于高光谱遥感图像“图谱合一”的性质,对其进行有效分类是获取地物信息的一种重要手段。传统的基于像元的高光谱遥感图像分类单从各类地物的光谱特征出发,与数据库光谱进行匹配识别,实现地物的分类。但是由于地物光谱库的局限性,并不是一种通用的方法。此外,混合像元的存在势必会带来一定的分类误差,所以后来出现了基于“端元”的高光谱图像分类,即将混合像元分解为不同的基本组分单元,利用亚像元空间定位技术进行分类。
对空间信息利用不足导致高光谱遥感图像分类遇到瓶颈,所以之后基于谱空信息联合的分类方法越来越受到学者的重视。付琼莹根据图理论,联合高光谱影像空谱信息,提出一种半监督极限学习机分类算法,提高了小样本下的高光谱影像的分类精度。支持向量机(Support Vector Machine,SVM)因其对高维度敏感性低,具有一定的鲁棒性。绽琨等利用高光谱图像的固有反照率特征机制(Albedo Recovery Mechanism,ARM)来挖掘空间语义信息,再使用支持向量机对恢复的内部反照率进行分类,达到了较为先进的分类性能。绽琨等采用因子分析来学习有效的光谱和空间特征,并将大边际分布机(Large-margin Distribution Machine,LDM)应用于高光谱遥感图像分类,实现了比SVM更好的分类效果。
近年来,随着深度学习的蓬勃发展,尤其是卷积神经网络(Convolutional Nearal Network,CNN)及其扩展在计算机视觉任务中异军突起,高光谱遥感图像分类迎来了新的发展机遇。胡伟等第一次将CNN模型引入高光谱图像分类任务中,但是仅利用了高光谱图像的光谱信息。Chen等基于CNN的有限元模型,提出了一种深度特征提取方法,以提取高光谱遥感图像的空谱特征。但是随着网络深度的增加,CNN存在过拟合和网络退化等问题,其中网络退化一直是一个难以突破的难题。何恺明等提出的残差网络很好地解决网络退化问题,并从数学原理上对其进行了阐释。宋微微等提出了一种深度特征融合网络(Deep Feature Fusion Network,DFFN),并引入残差学习来对卷积层进行优化,增加网络深度的同时也简化了网络训练过程,进一步提高分类精度。
因此,本文旨在利用残差学习的原理来进行高光谱遥感图像的分类,设计了基于光谱特征和空间特征的两种残差学习模块,分别且连续地学习原始高光谱数据的光谱信息和空间信息,并使用批量归一化(Batch Normalization,BN)方法提升训练数据的规范性,使用dropout方法防止网络过拟合。在训练中适当增加了网络的隐藏层层数,学习更多的特征。由于残差学习模块的存在,并没有出现网络退化的现象,精度也有所上升。
1 残差学习原理与残差学习模块
1.1 残差学习原理
就近几年深度学习应用于图像识别和分类的发展趋势来看,似乎网络的深度越深,就越能取得更为先进的成果,如VGG网络就是基于AlexNex网络加以改进的,通过增加网络的深度来大幅度提高网络性能。那么是否通过简单地增加网络的深度就可以学习到更好的网络呢?何恺明博士就这一问题给出了解释。
随着网络深度的增加,会导致梯度弥散或爆炸,通过初始化或归一化的操作可以使其得以收敛,但是网络退化问题也会随之暴露出来。何恺明团队通过在CIFAR-10数据集上进行验证试验,发现56层网络比20层网络的表现效果还要差,即随着网络层数增加,网络的性能在训练集上达到饱和甚至下降了。这还不能解释为过拟合,因为过拟合本应在训练集上表现得更好,这也说明了网络越深并不代表其越容易优化。
为了解决网络退化问题,何恺明及其团队提出了一种深度残差学习框架。如图1所示为残差模块中的一个构件单元,在一般的恒等映射(假设H(X)=X)中添加一个“跳跃连接”结构,将实际的映射表示为H (X )=F (X )+X ,这样网络学习的目标就改变了,不再是去学习一个完整的输出,而是变为了求残差F(X)=H(X)-X,这样在训练时让残差F(X)趋于零会比去拟合一个恒等映射更加容易一些。
图1 残差模块中的一个构件单元
Fig.1 A component of the residual module
受上述启发,本文设计了两个残差学习模块,从原始的高光谱遥感图像三维立方体中分别且连续地提取光谱和空间特征,有效地缓解了网络退化导致的精度下降问题。
1.2 残差学习模块
1.2.1 光谱残差模块
如图2所示,所设计的光谱残差模块可以看作是两个卷积层的快速连接。此外,为了规范训练过程,对每一层采用了批量归一化(BN),公式如下:
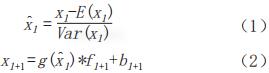
式(1)为BN过程,式(2)为卷积过程。其中 是 第l层经过批量归一化的结果;xl为第l+1层的输入特征向量;E(·)和Var(·)为输入特征向量的期望和方差函数;fl+1和bl+1分别表示第l+1层的卷积滤波器和偏置;g(·)为激活函数,即修正线性单元(Rectified Linear Unit,ReLU)。
是 第l层经过批量归一化的结果;xl为第l+1层的输入特征向量;E(·)和Var(·)为输入特征向量的期望和方差函数;fl+1和bl+1分别表示第l+1层的卷积滤波器和偏置;g(·)为激活函数,即修正线性单元(Rectified Linear Unit,ReLU)。
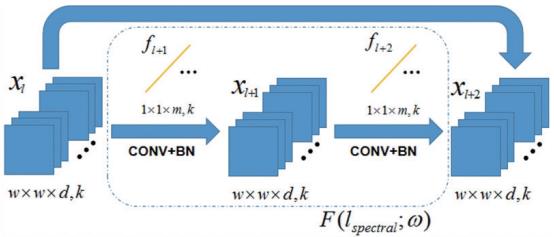
图2 光谱残差模块
Fig.2 The spectral residual module
对于第l层后的滤波器f l +1的和第l +1层后的滤波器fl+2,分别使用大小为1×1×m的卷积核,m为光谱深度。这样做的目的是在保持空间输入大小不变的前提下,对光谱信息进行降维。假设光谱残差模块的函数为 F(lspectral;ω),如下所示:

式中,lspectral为光谱残差模块中的第l层;xl为第l层 的k个输入特征,l={1,2,3…},ω={fl+1,fl+2,bl+1,bl+2}为光谱残差模块中的卷积滤波器和偏置。
1.2.2 空间残差模块
图3为空间残差模块,表示两个卷积层的快速连接,其功能是进行空间特征提取。批量归一化处理过程同光谱残差模块。
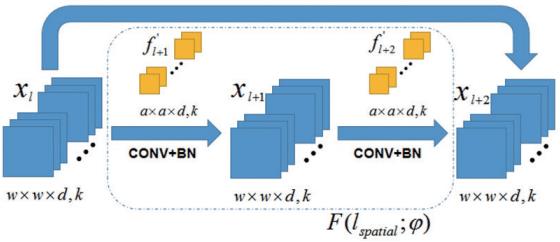
图3 空间残差模块
Fig.3 The spatial residual module
在两个连续的卷积层中分别使用k个大小为a×a×d的三维卷积核,d为其光谱深度,在空间残差模块中不参与计算,恒等于m。此外,使用边界填充策略使得输入特征与输出特征在空间大小上保持w×w不变。假设光谱残差模块的函数为F(lspatial;φ),其中φ ={f'l+1,f'l+2, b'l+1,b'l+2},如下式所示:

2 网络框架
基于残差学习网络模型的高光谱遥感图像分类的整体框架,如图4所示,这里假设每一种数据集包含k个标记像素X={x1,x2,…,xk}和z个土地利用类别Y={y1,y2,…,yz},以X中的标记像素为中心的邻域像素所组成的新的数据集Z={z 1,z2,…,zn}。本文提出的网络以数据中大小为w×w×d的三维立方体作为输入,其中w为卷积核的宽度,d为光谱深度。所有用于分类的数据被分成3组:训练组Z1、验证组Z2和测试组Z3,训练的目的即不断更新模型参数,直到模型能够对给定测试组Z3的地面真实标签Y(Ground T)做出最高精度的预测Y*。
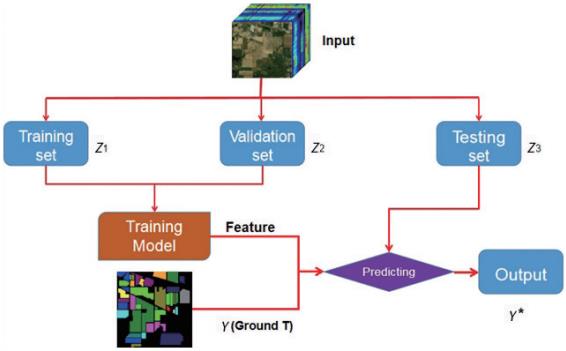
图4 网络框架
Fig.4 Flow chart of technology
在建立了分类框架之后,使用训练组Z1和验证组Z2及标签向量集Y对模型进行不断的迭代训练。其中验证组Z2起着监督的作用,通过监测临时模型(训练阶段生成的中间网络)的分类性能来监控整个训练过程,从而选择性能最好的网络。在此过程中,通过反向传播机制对网络参数进行更新,具体使用的是交叉熵目标函数:

式中,Y = {y1,y2,…,yz}表示真实标签向量, 表示预测标签向量。最后,利用测试组Z3对训练后的网络模型通过定量(计算分类指标)和定性(可视化分类结果)的方法来评估其分类结果。
表示预测标签向量。最后,利用测试组Z3对训练后的网络模型通过定量(计算分类指标)和定性(可视化分类结果)的方法来评估其分类结果。
3 实验与分析
3.1 实验数据集
实验所选用的数据集是西班牙巴斯克大学计算智能小组收集的Indian Pines和Pavia U数据集。其中,Indian Pines数据集是AVIRIS(机载可见光/红外成像光谱仪)传感器于1992年在印第安纳州西北部的测试场地上收集的场景,具有145×145个像素和224个光谱反射带,通过去除覆盖吸水区域的20多个频带,将频带数量减少到200个。其中可用的土地覆盖被指定为16个类别见表1,假彩色影像、地面真实标签、地物覆盖类别如图5所示。
表1 Indian Pines数据集场景类别及样本数量
Tab.1 The scene categories and sample size of Indian pines dataset
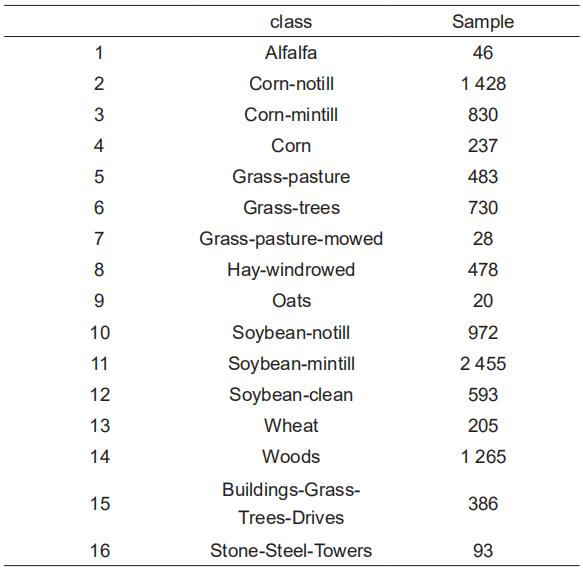
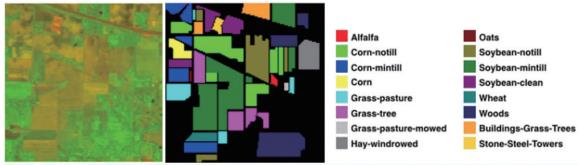
图5 Indian Pines数据集假彩色图像(左)、地面真实标签Ground T(中)、地物覆盖类别(右)
Fig.5 The Indian Pines dataset false color image (left), ground real label Ground T (middle), feature category (right)
Pavia U数据集是ROSIS传感器于1991年在意大利北部帕维亚上空飞行时拍摄的场景,有610×340个像素,空间分辨率是1.3 m,数据集场景类别及样本数量见表2。丢弃有噪声的频带之后,使用剩余的103个频带用于评估,共包含9种城市土地覆盖类型见表2,假彩色影像、地面真实标签以及地物覆盖类别如图6所示。
表2 Pavia U数据集场景类别及样本数量
Tab.2 The scene categories and sample size of Pavia U dataset
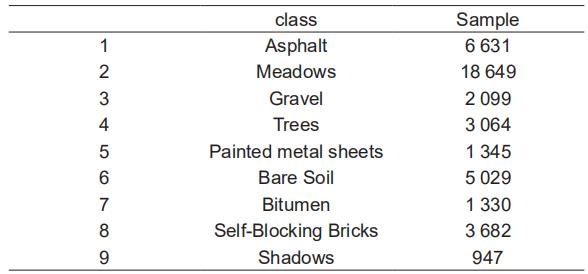
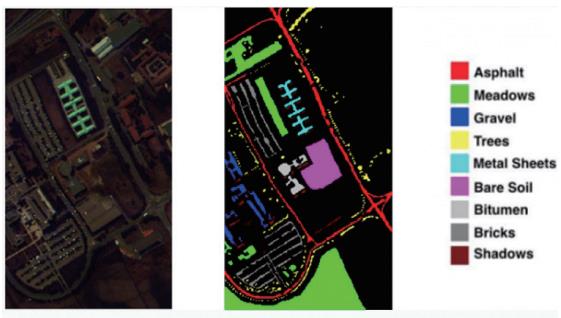
图6 Pavia U数据集假彩色图像(左)、地面真实标签Ground T(中)、地物覆盖类别(右)
Fig.6 Pavia U dataset false color image (left), ground real label Ground T (middle), feature category (right)
3.2 模型配置过程
3.2.1 特征学习过程
网络包括了原始输入三维立方体、光谱特征学习阶段、空间特征学习阶段、池化层和全连接层。模型配置过程如图7所示,原始输入高光谱遥感数据三维立方体的大小设计为7×7×200,使用1×1×m的卷积核对光谱特征进行降维。然后将输出立方体输入到连续的两个光谱残差模块进行光谱特征提取,再输入到连续的两个空间残差模块进行空间特征提取,特征提取过程中使用批量归一化(BN)规范训练数据,使用填充策略(PADDING)保持特征立方体的大小不变。在以上两个特征学习阶段结束之后,使用平均池化层(POOLING)对提取的光谱—空间特征进行池化操作。最后,使用全连接层(FC)生成一个与输入数据集地物覆盖类别数量相对应的输出向量。
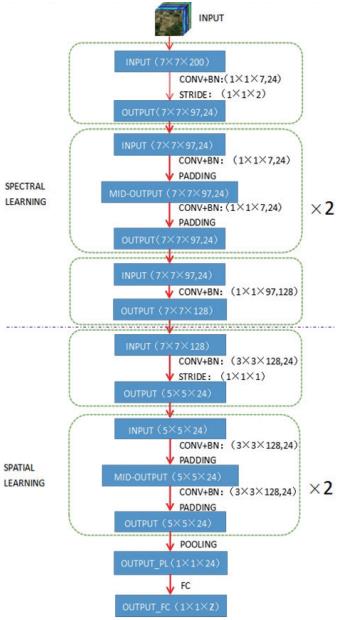
图7 模型配置过程
Fig.7 Confifiguration process of the model
3.2.2 参数设置
在训练过程中,批处理大小(batch)设置为16,训练历元(epoch)设置为200,在每个配置过程中保留验证组中具有最高分类性能的模型,并且通过最优模型生成最后的分类结果。同时,对影响训练过程和分类性能的3个因素加以讨论,分别是卷积核数量、卷积核大小以及学习率。
卷积核数量可以理解为提取特征的数量,决定了网络的计算量和特征表示能力。一般情况下,卷积核数量越多特征表示能力越强,但参与计算的参数量也会随之增多,会给网络模型甚至是计算设备带来沉重的负担,实验所使用的卷积核的数量为24。
卷积核大小即为卷积核的尺寸,本文在特征学习过程中不同阶段使用了不同大小的卷积核,在光谱特征学习阶段使用的是1×1×m的卷积核,在空间特征学习阶段使用的是3×3的卷积核,并使用边界填充策略。
学习率决定着目标函数能否收敛,学习速率过大会发散,过小会使得收敛速度十分缓慢。根据验证结果来看,Indian Pines数据集的最佳学习率为0.000 3,Pavia U数据集的最佳学习率为0.000 1。
3.3 精度评价方法
对高光谱遥感图像分类进行评价指的是依据地面实况图来评估所分得结果的准确性。常用的评价方法主要有总体分类精度、各类精度、平均分类精度以及Kappa系数等。下面对这些评价指标进行具体的介绍。
1)总体分类精度(Overall Accuracy,OA)
总体分类精度(OA)等于被正确分类的像元总和除以总像元数。被正确分类的像元数目沿着混淆矩阵的对角线分布,总像元数等于所有真实参考源的像元总数。公式如下,hii为沿着混淆矩阵的对角线分布的被正确分类的像元数目,N为样本总数,n为类别数目。

2)各类分类精度(Class Accuracy,CA)
各类精度(CA)指的是每一类中被准确分类的像元占该类别总数的百分比,同样可以通过混淆矩阵求得,其中CAi表示第i类的分类精度,hij是原本属于第i类结果被分到了第j类的像元个数,公式如下:

3)平均分类精度(Average Accuracy,AA)
平均分类精度(AA)指的是每一类分类精度的平均值,即采用各个类别分类精度(CA)除以类别总量N,其公式如下:

4)Kappa系数
Kappa系数是一致性检验的一种指标。它是通过把所有真实参考的像元总数(N)乘以混淆矩阵对角线(hkk)的和,再减去各类中真实参考像元数与该类中被分类像元(hik,hkj)总数之积之后,再除以像元总数的平方减去各类中真实参考像元总数与该类中被分类像元总数之积对所有类别求和的结果。在高光谱遥感分类领域,它评价了分类图像和参考图像之间的一致性,一般认为kappa系数的值大于0.75时说明一致性比较高,当kappa系数的值小于0.4时说明一致性不理想。总之,kappa系数综合考虑了混淆矩阵中的各个因子,能比较全面地反映总体分类的精度,Kappa系数的值越大,代表相应的分类算法的精度越高。一般公式如下:

3.4 分类结果
本文所提方法与SVM、ARM、CNN、LDM以及DFFN方法进行对比实验,并调整到它们的最佳设置。在Indian Pines数据集中,随机分配20%、10%和70%的标记数据到训练组、验证组和测试组。由于Pavia U数据集中样本数量较多,所以其比例为10%、10%和80%。利用上述评价方法(OA、AA、CA、kappa)对分类结果进行判定。
表3和表4给出了本文所提方法与其他方法用于Indian Pines和Pavia U数据集分类的恒生指数。通过数据可以看出,本文所提出的方法在后3个恒生指数上都表现得极为出色,唯一不足之处是Indian Pines数据集中没能对燕麦类(第9类Oats)的样本作出准确的区分,导致该类的分类精度较低,但是Indian Pines数据集中其他类别的分类精度以及Pavia U数据集的整体精度都保持在最高的水平。
表3 Indian Pines数据集分类结果(定量分析)
Tab.3 Classifification results of the Indian Pines data set (quantitative analysis)
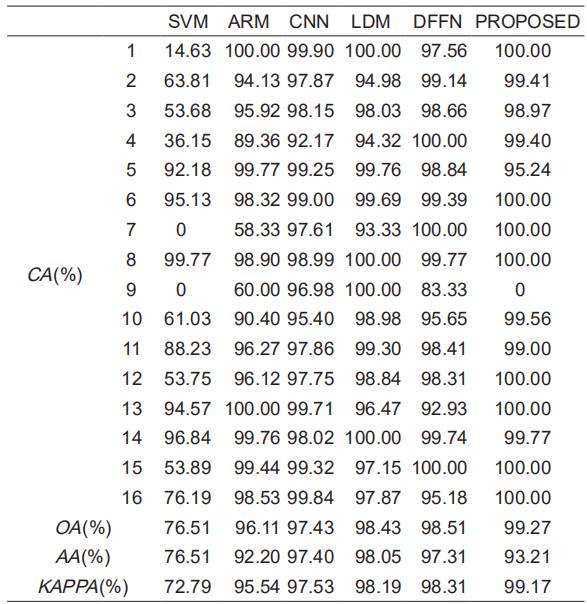
表4 Pavia U数据集分类结果(定量分析)
Tab.4 Classifification results of the Pavia U data set (quantitative analysis)
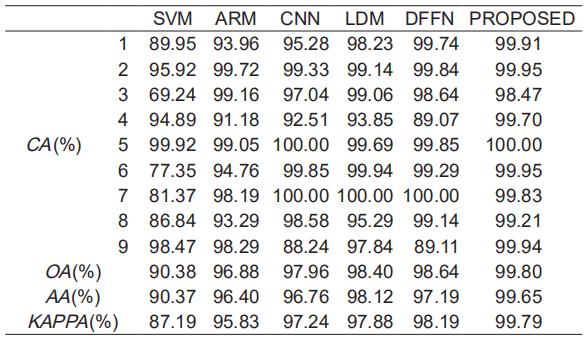
图8和图9可视化了各分类方法的分类结果,与表3和表4中的定量分析比较符合。可以看出,不论是Indian Pines数据集,还是Pavia U数据集,SVM方法生成的分类图噪声较大,ARM方法相比SVM有了很大的提升。CNN产生了平滑的效果,但在某些类中仍然存在一些错分的现象,LDM方法取得了比CNN更好的效果。DFFN方法和本文所提方法均使用了残差学习的方法,有效缓解了精度下降的问题,分类效果进一步提高,但结合定量分析中3个恒生指数(OA、AA、KAPPA)的比较来看,显然是拥有光谱-空间残差学习模块的本文方法更胜一筹。同时,与其他方法相比,本文所提方法给出了最为准确的分类结果,基本接近于地面真实标签。
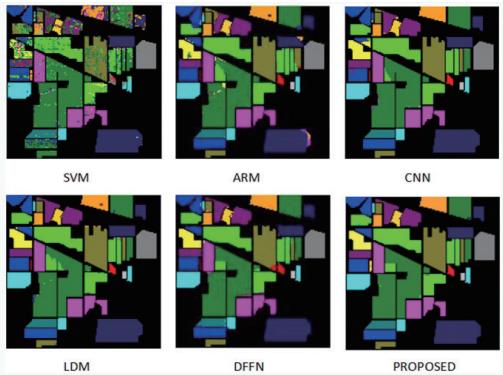
图8 Indian Pines数据集分类结果
Fig. 8 Classifification results of the Indian Pines data set
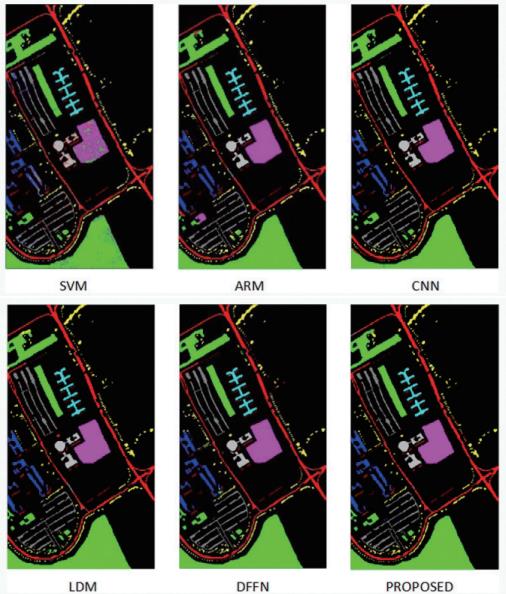
图9 Pavia U数据集分类结果
Fig.9 Classifification results of the Pavia U data set
4 结束语
本文提出了一种基于残差学习网络模型的高光谱遥感图像分类方法,与其他学习模型相比有以下三大优势:
1)基于残差学习原理,在卷积层之间添加“跳跃连接”,有效地缓解了训练过程中出现的网络退化问题,增加网络深度的同时提高了分类精度。
2)所设计光谱残差模块和空间残差模块,根据光谱和空间信息的特点,使用不同的卷积核分别且连续地提取用于判别的特征。
3)使用批量归一化(BN)策略规范了训练过程。由于残差网络模型的连续性和较强的特征学习能力,也比较容易扩展到其他的遥感场景,比如可以用自定义数据集代替公开数据集来验证网络模型的泛化能力。
另外值得注意的是,在达到最高精度的同时,模型的训练时间也是不可控的,相比不含残差结构的CNN模型,训练所花费的时间反而增多。而且当使用更大的空间输入和空间卷积核时,容易出现核死亡的情况,这与实验所使用设备的性能也有一定的关系,也是今后需要深入研究和突破的地方,争取在实验条件允许的情况下,保证精度并减少时间上的开销。
本期回顾
时空大数据与新型城镇化研究
·
·
·
·
·
·
理论研究
·
邮箱变更声明
·
网站开通公告
·
诚聘特约审稿专家
·
专题组稿
·

以上是关于星载遥感探测器对大气成分进行光谱分析的方法,原理的主要内容,如果未能解决你的问题,请参考以下文章