交通自动驾驶机器学习加州大学Path Lab——ACC和CACC系统的实车试验
Posted 一只交通科研dog
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了交通自动驾驶机器学习加州大学Path Lab——ACC和CACC系统的实车试验相关的知识,希望对你有一定的参考价值。
交通、自动驾驶、机器学习(1)加州大学Path Lab——ACC和CACC系统的实车试验
每周分享一篇Science Robotics、Transportation Research Part系列、IEEE Transaction ITS/IV或其他交通、自动驾驶和人工智能交叉领域的前沿期刊paper或会议论文。
(前期会先回顾近5年左右的重要的高被引文章,之后会集中更新每期最新刊发的文章。)
《Modeling cooperative and autonomous adaptive cruise control dynamic responses using experimental data》于2014年在Transportation Research Part C发表,文章全文链接:
https://www.sciencedirect.com/science/article/pii/S0968090X14002447?via%3Dihub
作者使用了四辆配备了Adaptive Cruise Control(ACC)和Cooperative Adaptive Cruise Control(CACC)系统的英菲尼迪 M56s(有钱啊)。其ACC系统主要依赖一台激光雷达,而CACC系统采用了当时还算先进的5.9 GHz Dedicated Short Range Communication(DSRC)系统。
随后ACC和CACC系统可以向低级控制器输送由dSpace计算后的车辆速度,且加速度被限定在1m/s² 到 -2.8m/s²之间。
这里先做一个简单的名词解释:
ACC:车辆能通过驾驶员设定好的车头时距,自适应调节速度与前车保持一个相对恒定的车头时距系统;
CACC:与ACC系统相比,增加了与前车(必须也装备CACC系统)通信的能力;
文章指出ACC系统作为较早的中高端车辆设备,已经早在上世纪末就被研究人员提出了许多控制和仿真模型,包括Naranjo等人在2006年提出的机器学习模型(可见轮子造了多少年了)。
于是作者对四辆车不同状态进行试验,此外还引入了一个classical model:Intelligent Driven Model(IDM)模型作比较。
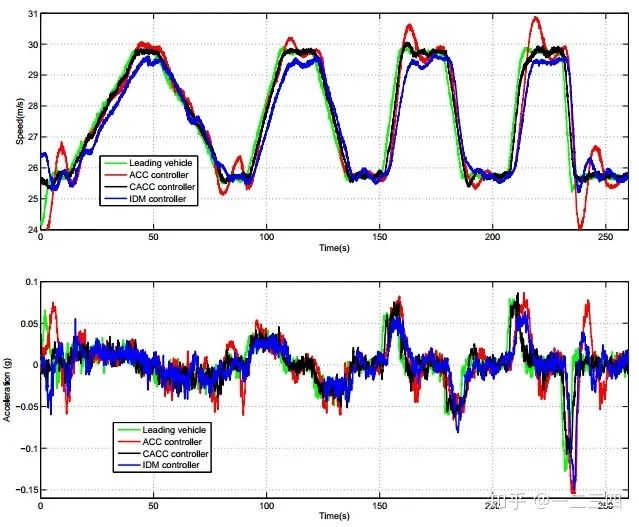
从这张图中,还是能比较明显的看出黑色的CACC系统更贴近黑色的leader,这意味着更低和更小的加减速,以及更快的响应。
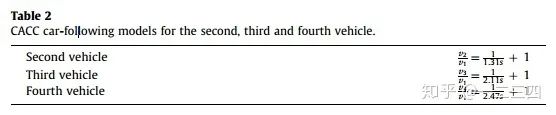
其中,很重要的两个表格是
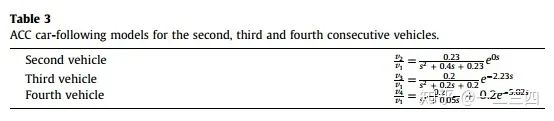
如果对控制系统有了解的同学,就对这个很熟悉了,典型的二阶和一阶时滞响应。
然后,基于实际测得的数据,作者分别给出了CACC和ACC的仿真控制模型,都是基于车辆间距和速度差的简化模型,可以说,这两个模型是近几年交通领域引用次数最多的自动驾驶仿真模型之一了。
最后,作者给出路两个比较重要的结论:
01
ACC系统其实很容易对前方车辆的减速行为过激减速,也即,连续的ACC车辆会大幅度放大震荡波,甚至超过了IDM模型,这和之前很多研究人员通过理想的控制模型得出的结论完全相反。
02
CACC系统具有显著提高道路通行能力和车辆稳定性的能力,即使在较少配置的情况下,依然能产生很好的效果。
总的来讲,这篇文章给后续交通流仿真和交通安全领域的研究带来了很大帮助,虽然已经过去6年了,依然有很多文章在采用这里面的模型和标定的参数,但问题在于,文章在实测中明确得到的延迟却并没有在仿真模型得到体现。
*本文仅代表个人观点,不对文章本身负责,如有异议,欢迎探讨
一只交通科研dog
知乎号|一二三四
邮箱|kema@seu.edu.cn
以上是关于交通自动驾驶机器学习加州大学Path Lab——ACC和CACC系统的实车试验的主要内容,如果未能解决你的问题,请参考以下文章