《人工智能导论》莫宏伟
Posted Notebook
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了《人工智能导论》莫宏伟相关的知识,希望对你有一定的参考价值。
https://www.ryjiaoyu.com/book/details/9182
https://www.icourse163.org/course/HRBEU-1458453162
第1章 绪论.....................................................................1
1.0 学习导言 .......................................................... 2
1.1 生命与智能 ..................................................... 2
1.1.1 什么是智能 ...................................... 4
1.1.2 图灵测试与人工智能 .................. 5
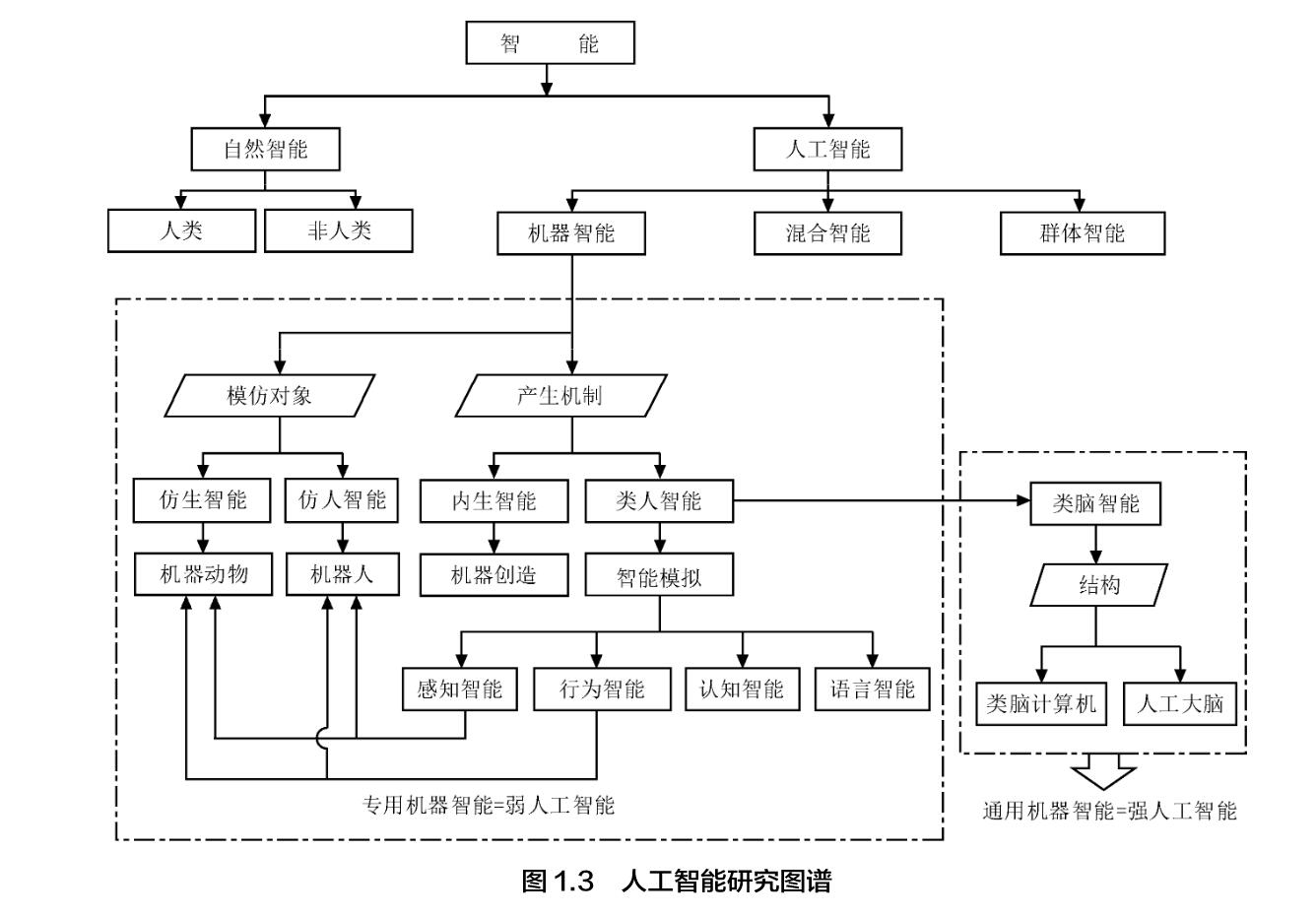
1.1.3 人工智能图谱 .................................. 9
1.2 人工智能的历史 ..................................... 11
1.2.1 第一阶段:初创时期(1936 年—1956 年)........... 11
1.2.2 第二阶段:形成时期(1956 年—1969 年)........... 13
1.2.3 第三阶段:发展时期(1970 年—1992 年) .......... 14
1.2.4 第四阶段:大突破时期(1993 年至今) ....................... 16
1.3 人工智能学科交叉与融合 ............19
1.4 人工智能实现方法 ........................... 20
1.4.1 传统实现方法 ............................... 20
1.4.2 数据驱动方法 ............................... 22
1.5 人工智能主要研究内容 ................. 24
1.5.1 计算智能 .......................................... 24
1.5.2 感知智能 .......................................... 25
1.5.3 认知智能 .......................................... 25
1.5.4 行为智能 .......................................... 26
1.5.5 群体智能 .......................................... 27
1.5.6 混合智能 .......................................... 27
1.5.7 情感智能 .......................................... 28
1.5.8 类脑智能 .......................................... 28
1.5.9 人工智能伦理与法律 ............... 29
1.6 人工智能发展趋势 ............................ 29
1.7 本书主要学习内容 ............................ 33
1.8 本章小结 ................................................. 34
1.9 习题 ............................................................ 34
第2章 人工智能的哲学观 .......................... 35
2.1 从哲学角度理解人工智能 ............ 36
2.1.1 与人工智能有关的哲学概念 ....... 36
2.1.2 与人工智能有关的主要哲学分支 .......41
2.1.3 大历史观——智能进化 .......... 43
2.1.4 人工智能的本质 ......................... 44
2.2 人工智能局限性的认识 ................ 45
2.2.1 弱人工智能与人类心智的差距 ..........46
2.2.2 影响强人工智能实现的主要因素 ........ 48
2.3 科幻影视作品中的人工智能 ..... 50
2.3.1 早期科幻影视作品中的人工智能 .... 50
2.3.2 现代科幻影视作品中的人工智能 ....... 51
2.4 本章小结 ...................................................... 53
2.5 习题 ............................................................53
第3章 脑科学基础 .............................................. 55
3.0 学习导言 .................................................56
3.1 大脑的初步认识 ..................................56
3.2 脑神经系统 ............................................57
3.2.1 脑神经组织 .................................... 57
3.2.2 神经元与信息传递..................... 59
3.2.3 大脑皮层 .......................................... 63
3.3 脑的视觉与信息处理机制............65
3.3.1 脑的视觉结构 ............................... 65
3.3.2 视觉皮层区域 ............................... 66
3.4 脑的记忆与信息处理机制............67
3.5 脑的学习机制 ......................................68
3.6 脑功能新发现 ......................................69
3.6.1 大脑导航功能 ............................... 69
3.6.2 大脑孕周发育 ............................... 71
3.7 本章小结 .................................................71
3.8 习题............................................................71
第4章 人工神经网络 .............................................. 73
4.0 学习导言 ................................................ 74
4.1 如何构建人工神经网络................. 74
4.1.1 神经元模型 .................................... 74
4.1.2 感知器模型 .................................... 76
4.2 神经网络的训练—反向传播算法 ..... 80
4.3 生成深度神经网络 ........................... 83
4.3.1 生成模型——受限玻尔兹曼机 .... 83
4.3.2 深度生成模型—深度置信网络 .......85
4.4 卷积神经网络原理 ........................... 86
4.4.1 稀疏连接与全连接 .................... 87
4.4.2 权值共享与特征提取 ............... 87
4.4.3 卷积层 ............................................... 88
4.4.4 池化层 ............................................... 89
4.4.5 全连接层..........................................90
4.4.6 CNN 算法 ....................................... 91
4.5 循环神经网络...................................... 93
4.6 长短时记忆网络 ................................ 94
4.7 本章小结 ................................................ 95
4.8 习题 ........................................................... 96
第5章 机器学习 ................................................97
5.0 学习导言 ................................................ 98
5.1 机器学习能否实现机器智能 ...... 98
5.2 机器学习的类型和应用 ................ 99
5.3 监督学习与无监督学习 ............. 101
5.3.1 支持向量机.................................. 101
5.3.2 k-最近邻分类 ........................... 102
5.3.3 朴素贝叶斯分类器.................. 103
5.3.4 集成分类——Bagging 算法、随机森林算法与 Boosting算法 .......104
5.3.5 k-均值聚类算法 ..................... 107
5.4 深度学习 ............................................. 107
5.4.1 浅层学习与深度学习 ............ 107
5.4.2 深度学习框架 ............................ 109
5.4.3 深度学习的应用——图像描述 ..... 110
5.5 强化学习 .............................................. 112
5.5.1 能够自适应学习的 BRETT机器人 ......112
5.5.2 强化学习的应用 ....................... 113
5.6 迁移学习 .............................................. 114
5.7 机器创造 .............................................. 116
5.8 本章小结 .............................................. 119
5.9 习题 ......................................................... 119
第6章 感知智能 ...............................................121
6.0 学习导言 .............................................. 122
6.1 数字图像处理技术 ......................... 122
6.1.1 灰度直方图校正 ....................... 123
6.1.2 图像的平滑处理 ....................... 124
6.1.3 图像的边缘检测 ....................... 124
6.1.4 图像的锐化 ................................. 125
6.1.5 图像的分割 ................................. 126
6.1.6 图像的特征提取与Haar 算法 ... 126
6.1.7 图像分析 ....................................... 127
6.2 计算机视觉与机器视觉 .............. 129
6.3 模式识别与图像分类 ................... 131
6.3.1 模式识别方法 ............................ 131
6.3.2 模式识别过程 ............................ 132
6.3.3 图像分类 ....................................... 133
6.4 人脸识别 .............................................. 133
6.4.1 人脸识别技术的发展 ............ 134
6.4.2 人脸识别系统及其实现方法 ........ 134
6.5 深度学习在目标检测与识别中的应用 ........ 137
6.6 无人驾驶汽车的环境感知......... 139
6.7 本章小结 .............................................. 142
6.8 习题......................................................... 142
第7章 认知智能 ................................................. 143
7.0 学习导言 ............................................. 144
7.1 逻辑推理 .............................................. 144
7.1.1 命题与推理 ................................. 144
7.1.2 推理的类型.................................. 145
7.1.3 模糊推理 ....................................... 148
7.2 知识表示 ............................................. 149
7.2.1 谓词逻辑表示法 ....................... 149
7.2.2 语义网络表示法 ....................... 152
7.3 搜索技术 ............................................. 154
7.3.1 盲目搜索 ....................................... 155
7.3.2 启发式搜索.................................. 155
7.3.3 蒙特卡罗树搜索算法 ............ 158
7.4 知识图谱 .............................................. 159
7.4.1 知识图谱与认知智能 ............ 160
7.4.2 知识图谱基本技术 ................. 161
7.4.3 知识图谱架构 ............................ 163
7.5 认知计算 .............................................. 165
7.6 本章小结 .............................................. 167
7.7 习题 ......................................................... 167
第8章 语言智能 ............................................... 169
8.0 学习导言 ............................................. 170
8.1 语言与认知 ......................................... 170
8.2 自然语言处理.................................... 171
8.2.1 自然语言理解的源起 ............ 171
8.2.2 自然语言处理的功能应用 ........... 172
8.2.3 自然语言处理技术.................. 173
8.3 智能问答系统.................................... 177
8.4 聊天机器人 ......................................... 178
8.4.1 聊天机器人的分类 ................. 179
8.4.2 聊天机器人的自然语言理解 ............ 180
8.5 语音识别 .............................................. 181
8.5.1 语音识别系统 ............................ 181
8.5.2 语音识别的过程 ....................... 182
8.6 机器翻译 .............................................. 183
8.6.1 机器翻译原理与过程 ............ 184
8.6.2 通用翻译模型 ............................ 186
8.7 本章小结 .............................................. 187
8.8 习题......................................................... 187
第9章 机器人 ................................................... 189
9.0 学习导言 .............................................. 190
9.1 机器人与行为智能 ......................... 190
9.1.1 行为主义载体——机器人 ... 190
9.1.2 机器人的基本组成.................. 192
9.1.3 智能机器人 ................................. 194
9.2 工业机器人 ......................................... 195
9.3 移动机器人 ......................................... 198
9.4 无人飞行器......................................... 201
9.5 水下机器人 ......................................... 203
9.6 太空机器人......................................... 204
9.7 人形机器人 ......................................... 207
9.8 机器动物 .............................................. 208
9.9 软体机器人......................................... 212
9.10 微型机器人 ...................................... 213
9.11 群体机器人 ...................................... 215
9.12 认知发展机器人 ........................... 217
9.13 本章小结 ........................................... 218
9.14 习题 ...................................................... 218
第10章 混合智能 ............................................... 219
10.0 学习导言 ........................................... 220
10.1 混合智能的基本形态与实现 ............ 220
10.2 脑机接口 ........................................... 221
10.2.1 脑机接口工作原理............... 222
10.2.2 可探测识别的脑电波信号 ...... 223
10.2.3 侵入式脑机接口 .................... 225
10.2.4 非侵入式脑机接口 .............. 227
10.2.5 脑机接口应用 ......................... 228
10.3 可穿戴混合智能 ........................... 229
10.3.1 可穿戴传感器与电子文身 .......... 230
10.3.2 可穿戴神经刺激混合智能 ........... 231
10.4 可植入混合智能 ........................... 232
10.4.1 电子识别芯片 ......................... 232
10.4.2 人造感觉神经 ......................... 233
10.5 外骨骼混合智能 ...........................234
10.6 动物混合智能................................. 235
10.7 人体增强 ........................................... 237
10.8 本章小结 ........................................... 238
10.9 习题 ...................................................... 238
第11章 类脑计算 ............................................. 239
11.0 学习导言 ........................................... 240
11.1 类脑计算基础 ................................. 240
11.1.1 冯·诺依曼结构计算机的局限 ......... 241
11.1.2 类脑计算机............................... 242
11.1.3 类脑计算研究内容与方法 ........... 242
11.2 类脑计算基础..................................243
11.2.1 神经形态计算 ......................... 243
11.2.2 神经形态类脑芯片............... 244
11.2.3 神经形态类脑计算机 ......... 245
11.3 基于忆阻器的类脑计算 ............249
11.3.1 忆阻器原理............................... 249
11.3.2 忆阻器芯片............................... 250
11.4 人工大脑 ............................................ 251
11.4.1 人工大脑的基本单元 ......... 251
11.4.2 仿脑模型 .................................... 253
11.4.3 虚拟大脑 .................................... 254
11.4.4 深度学习脑功能模拟 ......... 256
11.5 非神经形态智能芯片 ................. 258
11.6 本章小结 ............................................ 260
11.7 习题....................................................... 260
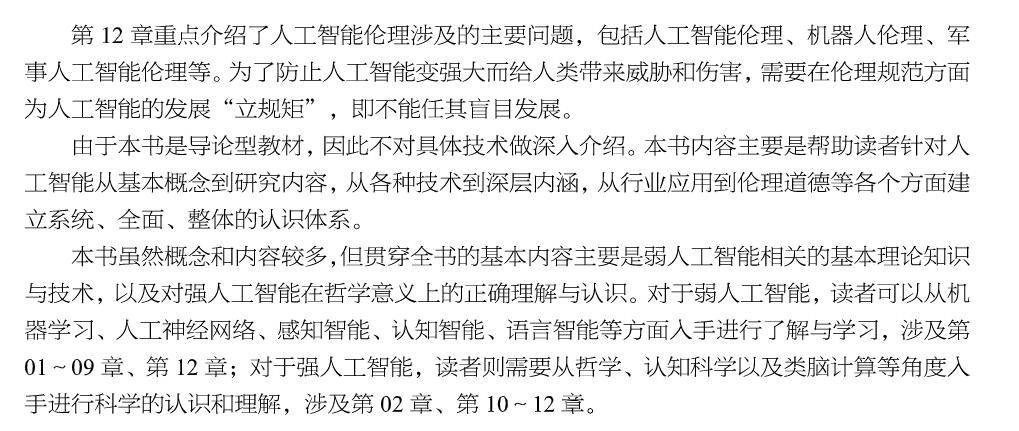
第12章 人工智能伦理与法律 ............. 261
12.0 学习导言 ................................. 262
12.1 电车难题引发的人工智能道德困境 .......... 262
12.2 人工智能技术引发的社会问题..................... 264
12.3 人工智能伦理的定义 ................ 266
12.4 弱人工智能伦理与强人工智能伦理 .............. 267
12.4.1 弱人工智能伦理问题 ......... 267
12.4.2 强人工智能伦理问题 ......... 270
12.5 机器人伦理问题与基本原则 ..... 272
12.5.1 机器人伦理问题 .................... 272
12.5.2 机器人伦理的基本原则 .... 273
12.6 军事人工智能伦理问题 ...........274
12.7 人工智能伦理规范 ...................... 276
12.8 人工智能法律问题 ...................... 278
12.8.1 人工智能引发的法律问题 ......... 278
12.8.2 人工智能的法律主体和法律人格问题 .........279
12.9 本章小结 ........................................... 281
12.10 习题 ................................................... 281
人工智能导论期末复习合集
人工智能导论期末复习合集
AI导论知识点目录
〇、绪论
重点:人工智能定义、人工智能研究内容(了解、理解即可)
一、知识的概念
重点:知识的概念、知识的表示
知识是人们在长期的生活及社会实践中、在科学研究及实验中积累起来的对客观世界的认识与经验。
知识的形式:事实、因果关联
知识的特性:相对正确性(明确前提)、不确定性(真假之外)、可表示性(形式描述)、可利用性(学以致用)
练习题
- 知识的概念

二、基本搜索
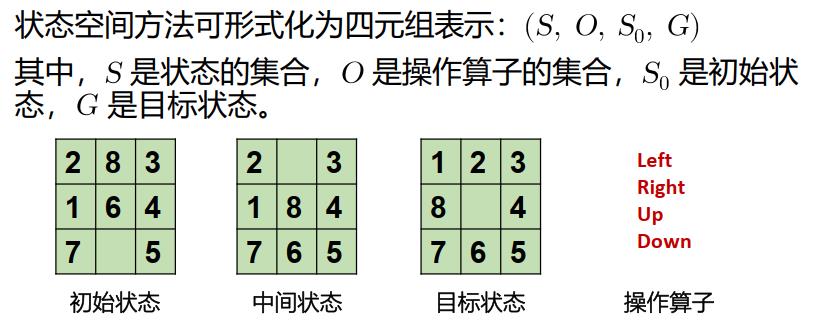
2.1 状态空间法
· 状态:表示问题解法中每一步问题状况的数据结构
· 操作:状态变换的手段
· 状态空间:表示问题全部可能状态及其关系的图
· 状态空间的解:从初始状态到目标状态的操作算子序列
2.2 无信息搜索
只按预定的控制策略进行搜索,在搜索过程中获得的中间信息不会用来改进控制策略。
每个节点的分支数为b,最浅解位于第s层,搜索空间共m层。
2.2.1 宽度优先搜索【队列】
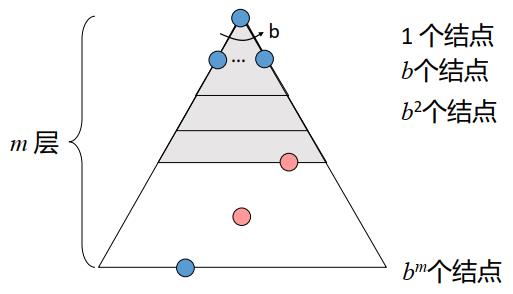
时间复杂度:O( b s b^s bs)
空间复杂度:O( b s b^s bs)
具有完备性、最优性
2.2.2 深度优先搜索【栈】

时间复杂度:O( b m b^m bm)
空间复杂度:O( b m bm bm)
可能不具有完备性(图有环时需进行约束)、不具有最优性(最左的解)
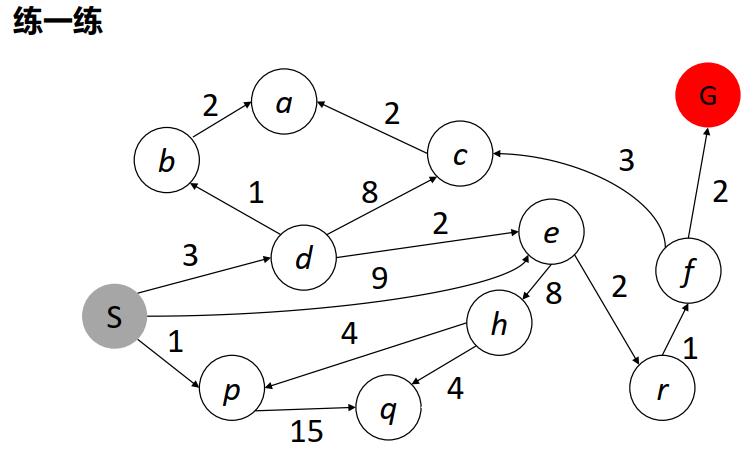
2.2.3 一致代价搜索【优先队列】
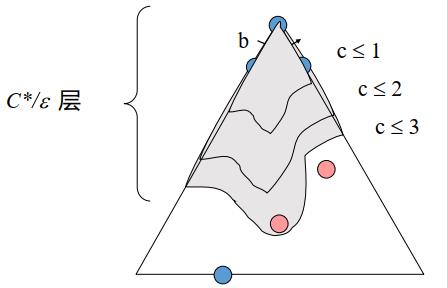
解代价为
C
∗
C^*
C∗,边最小代价为
ε
ε
ε
时间复杂度:O( b C ∗ / ε b^C^*/ε bC∗/ε)
空间复杂度:O( b C ∗ / ε b^C^*/ε bC∗/ε)
具有完备性、最优性
练习题
- 一致代价搜索的终止条件:
- 无信息搜索
2.3 启发式搜索
在搜索中加入了与问题有关的启发性信息,用于指导搜索朝着最有希望的方向进行,加速问题的求解过程并找到最优解。
2.3.1 贪婪搜索【优先队列】
搜索策略: 拓展看起来离目标最近的节点
评估函数:
f
(
n
)
=
h
(
n
)
f(n)=h(n)
f(n)=h(n)【
h
(
n
)
h(n)
h(n)表示从
n
n
n节点到目标节点最佳路径的估计代价】
最坏情况下退化为DFS,时间复杂度为O( b m b^m bm)
空间复杂度:O( b m b^m bm)【存储所有节点的信息】
不具有完备性和最优性
2.3.2 A*搜索【优先队列】
搜索策略: 避免拓展耗费已经很大的路径
评估函数:
f
(
n
)
=
g
(
n
)
+
h
(
n
)
f(n)=g(n)+h(n)
f(n)=g(n)+h(n)【g(n)表示初始节点到n节点的实际代价、h(n)表示估计代价】
- 可纳性
如果对任意节点 𝑛 𝑛 n, h ( n ) ≤ h ∗ ( n ) h(n)≤h^*(n) h(n)≤h∗(n)成立, 则启发式函数是可纳的(admissible), 其中, h ∗ ( n ) h^*(n) h∗(n)是结点 𝑛 𝑛 n到目标状态的真实代价。
定理:若 h ( n ) h(n) h(n)可纳,则A*搜索算法具有最优性。
- 一致性(一致->可纳)
若对于任意节点 n n n和通过操作 a a a生成的后续节点 n ′ n' n′,则 h ( n ) ≤ c o s t ( n , a , n ′ ) + h ( n ′ ) h(n)≤cost(n,a,n')+h(n') h(n)≤cost(n,a,n′)+h(n′)成立,则启发式函数是一致的
定理:若 h ( n ) h(n) h(n)一致,则A*搜索算法具有最优性。
-
优势性
对于任意节点 n n n,可纳启发式函数 h 1 ( n ) < h 2 ( n ) h_1(n)<h_2(n) h1(n)<h2(n) ,称 h 2 h_2 h2优于 h 1 h_1 h1 -
最优性
假设A是最优目标节点,B是次优节点,则A比B更早被搜索。

-
A*算法性能分析
b b b表示每个节点的后继节点数, d d d表示解的深度, ε ε ε表示相对误差 h ∗ − h h ∗ \\frach^*-hh^* h∗h∗−h , h ∗ h^* h∗为真实代价, h h h为估计代价
最坏时间复杂度:O( b ε d b^εd bεd)
空间复杂度:O( b m b^m bm) -存储所有节点的信息
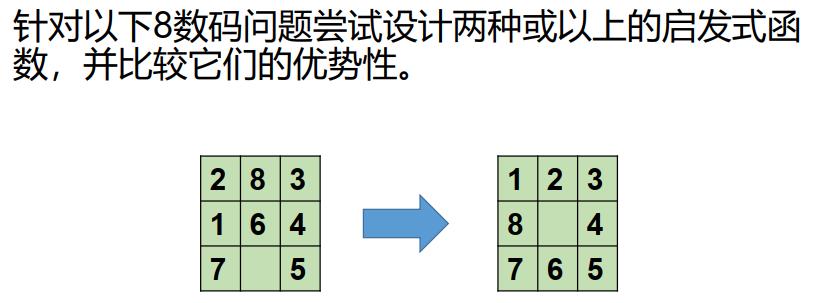
启发式函数设计
- 问题松弛化
八数码问题:棋子可以从方格A->方格B,如果A与B水平或竖直相邻且B为空。
去掉相关条件,形成松弛问题:
A与B相邻,棋子可从A移到B(距离)
如果B空,棋子可从A移动B
棋子可从A移动到B(不在位)
-
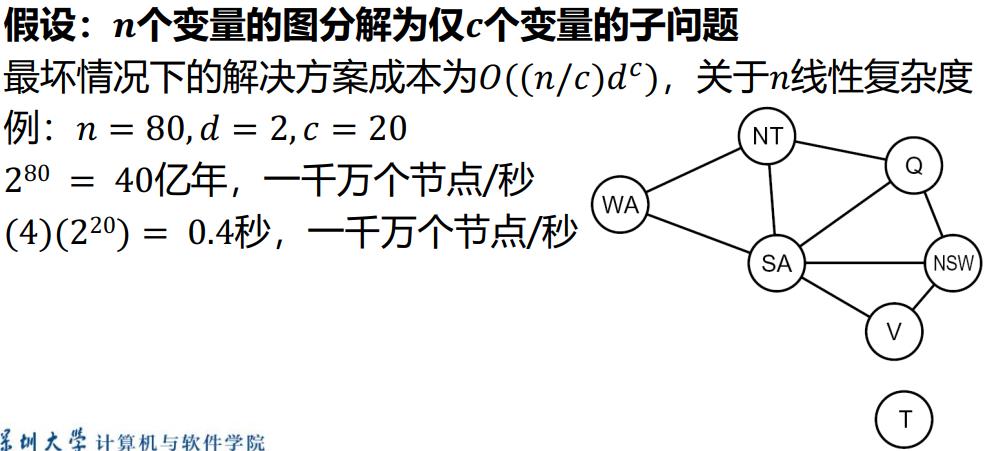
子问题分解
原问题分解为多个子问题,考虑子问题的解代价。 -
模式数据库
存储子问题模式解代价,从目标反向搜索计算模式代价,针对子问题,查找模式数据库。 -
从经验中学习
总结
- A * 算法综合了后向路径代价和前向估计代价;
- 如果启发式函数可纳/一致, A*是最优的;
- 启发式函数设计是关键,应选具有优势的启发式函数。
练习题
- A*搜索

- 修道士问题(M-C问题)

- 各种搜索算法的搜索过程

三、约束满足问题
3.1 回溯法
以N皇后问题为例,从初始状态开始,按行逐一摆放皇后,遇到矛盾时返回上一状态,重新摆放皇后。
由此,搜索空间是一棵搜索树,直至搜索至第N层即可找到可行解。
回溯搜素 = DFS + 变量分配【每次一个变量】 + 约束检查【考虑与前面分配不冲突的变量值】
具有完备性
具有最优性
时间复杂度:O(N!)
空间复杂度:O(N)
3.2 排序策略
3.2.1 最少可取值
(对节点排序,每次选择值域最少可取值的变量)
3.2.2 度启发式
(对节点排序,每次选择度最大的变量)
3.2.3 最少约束值
(对颜色排序,选择给近邻变量留下更多选择的值)
3.3 推理策略
3.3.1 约束传播-局部相容性
- 节点相容(单个变量值域的所有取值满足其一元约束)
- 边相容(满足所有的二元约束)
- 若X去除某个值,X的近邻需要再次检查,边相容比前向检查更早检测出错误
- 路径相容(通过观察变量得到隐式约束来加强二元约束)
- …k阶相容
- 强k阶相容(k-1,k-2,…,1也相容,无需回溯就可求解问题)
3.3.2 智能回溯
- 搜索失败时返回前一个变量,尝试另一个值,回溯到哪个变量?

3.3.3 前向检查
3.4 问题结构特性
极端情况:大问题由独立子问题构成,独立子问题可认为是约束图的连接组件(连通子图)
3.4.1 树状约束满足问题-图转树
-
变量(拓扑排序):
选择一个根变量,对变量进行排序,先父母后孩子。
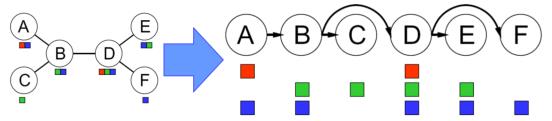
两变量最多有一条路径,所以n个结点的树有n-1条边。 -
边相容:
应用Remove Inconsistent(Parent( X i X_i Xi), X i X_i Xi) -
变量分配:
对于 i = 1 : n i = 1:n i=1:n,相容地分配 X i X_i Xi


练习题

3.5 局部搜索
优点
- 通常只用常熟级的内存
- 通常能在标准约束满足算法不适用的很大或无限的(连续的)状态空间中找到合理的解
- 对于解决纯粹的最优化问题十分有用,其目标是根据目标函数找到最佳状态
- 如果存在解, 最优的局部搜索算法可找到全局最大/最小值
CSP局部搜索
- 初始变量分配违反一些约束
- 重新分配变量值
基本思想
变量选择:随机选择任何有冲突的变量
值选择:最小冲突启发式
- 选择一个违反最少约束的值
- 爬山法——启发式信息h(n)=违反约束的总数
- 其他局部搜索方法:模拟退火、局部束搜索
3.5.1 爬山法
从任意初始状态开始,每次移动到最好的近邻状态,若无近邻状态比当前更好,则退出循环,得到爬山法的解。
- 不具有完备性
- 不具有最优性
- 时间复杂度较低
- 空间复杂度:O(N)
- 可从任意地方开始
- 重复:移动到最好的近邻状态
- 若无近邻状态比当前更好,则退出

无最优性的概念,不具有完备性。
特点:速度快,但易于陷入局部最优。
改进爬山法
- 随机爬山法:概率随机选择下一步,可能找到更好的解
- 首选爬山法:随机直至选到优于当前的结点,后继多时较好
- 随机重启爬山法:多次尝试,算法完备性的概率接近1
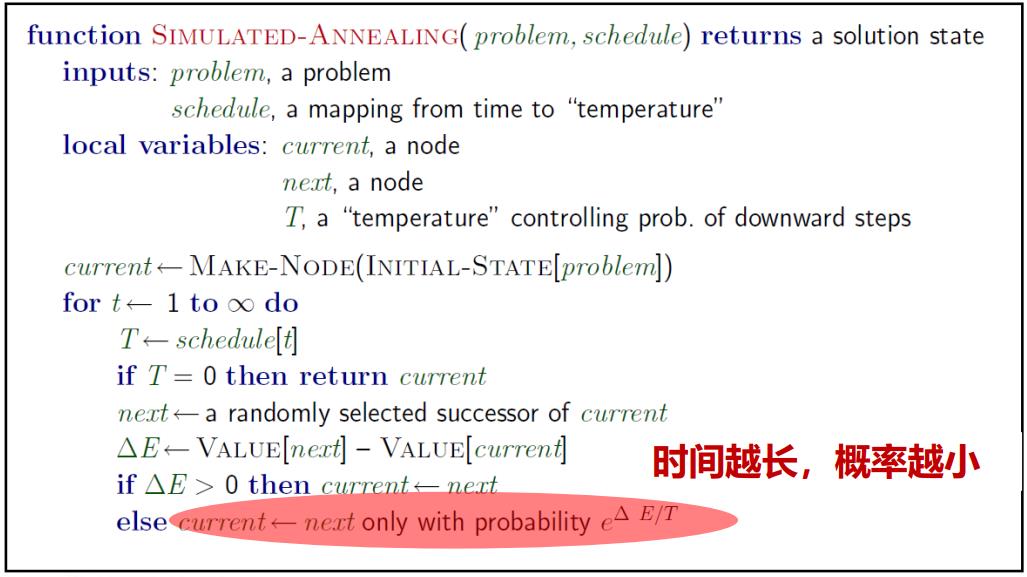
3.5.2 模拟退火
在爬山法的基础之上,允许“下山”动作跳出局部最优解,从而能有更大概率找到全局最优解。
- 不具有完备性
- 具有最优性
- 时间复杂度比爬山法高
- 空间复杂度:O(N)
3.5.3 局部束搜索
从k个随机生成的状态开始,每一步全部k个状态的所有后继被生成。如果其中有一个是目标状态,则算法停止;否则从整个所有后继列表中选择k个最佳后继,重复直至达到目标状态。
- 不具有完备性
- 不具有最优性
- 时间复杂度比爬山法高
- 空间复杂度:O(N)
(随机)束搜索:
在所有后继列表中随机选择k个后继,其中选中概率是状态值的递增函数,类似于自然选择。
3.5.4 遗传算法
遗传是随机束搜索的一个变形。把两个父状态结合(选择、交叉、变异)来生长后继,而不是通过修改单一状态进行。
- 具有完备性
- 具有最优性
- 时间复杂度比爬山法高
- 空间复杂度:O(N)
练习题
-
回溯算法优化方法有哪些,其主要思想是什么,可以带来哪些好处?
-
编程实现N皇后回溯搜索算法,至少采用一种优化策略加速搜索过程。
-
实现N皇后至少一种局部搜索方法,并分析其算法的性能(四个搜索算法评价指标)。
四、对抗搜索
4.1 Minimax
搜索:自顶向下
计算:自底向上
搜索方法:类似DFS
时间复杂度:O(
b
m
b^m
bm)
空间复杂度:O(
b
m
bm
bm)
面临问题:搜索空间巨大
4.2 Alpha-Beta剪枝
一种找到最佳minimax步骤的方法,同时可以避免搜索不可能被选择的步骤的子树。
Alpha:可能步骤的最大下界
Beta:可能步骤的最小上界
任何新节点被认为是可能路径节点 当且仅当
α
≤
V
a
l
u
e
(
N
)
≤
β
α≤Value(N)≤β
α≤Value(N)≤β
剪枝性质:
- 剪枝不影响根节点Minimax值
- 中间节点值可能不同
- 子节点的次序影响剪枝效率
- 最好时间复杂度:O( b m / 2 b^m/2 bm/2)


 电子书人工智能导论
电子书人工智能导论