STM32F407的DSP教程第49章 STM32F407的自适应滤波器实现,无需Matlab生成系数(支持实时滤波)
Posted 安富莱电子
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了STM32F407的DSP教程第49章 STM32F407的自适应滤波器实现,无需Matlab生成系数(支持实时滤波)相关的知识,希望对你有一定的参考价值。
完整版教程下载地址:http://www.armbbs.cn/forum.php?mod=viewthread&tid=94547
第49章 STM32F407的自适应滤波器实现,无需Matlab生成系数(支持实时滤波)
本章节讲解LMS最小均方自适应滤波器实现,无需Matlab生成系数,可以自学习。
49.1 初学者重要提示
49.2 自适应滤波器介绍
49.3 LMS最小均方自适应滤波器介绍
49.4 Matlab自适应滤波器实现
49.5 自适应滤波器设计
49.6 实验例程说明(MDK)
49.7 实验例程说明(IAR)
49.8 总结
49.1 初学者重要提示
1、 ARM DSP库提供了LMS最小均方自适应滤波和归一化最小均方自适应滤波器,推荐使用归一化方式,因为归一化方法的步长更容易设置。
2、 自适应滤波器的滤波因数步长设置比较考究,详见本章教程第5.3小结。
49.2 自适应滤波器介绍
自适应滤波器能够根据输入信号自动调整滤波系数进行数字滤波。作为对比,非自适应滤波器有静态的滤波器系数,这些静态系数一起组成传递函数。
对于一些应用来说,由于事先并不知道需要进行操作的参数,例如一些噪声信号的特性,所以要求使用自适应的系数进行处理。在这种情况下,通常使用自适应滤波器,自适应滤波器使用反馈来调整滤波器系数以及频率响应。
随着处理器性能的增强,自适应滤波器的应用越来越常见,时至今日它们已经广泛地用于手机以及其它通信设备、数码录像机和数码照相机以及医疗监测设备中。
49.3 LMS最小均方介绍
LMS 最小均方自适应滤波器能够"学习"未知的传输特性。LMS滤波器使用梯度下降方法,根据瞬时错误信号更新滤波系数。自适应滤波器常用于通信系统、均衡器和降噪。
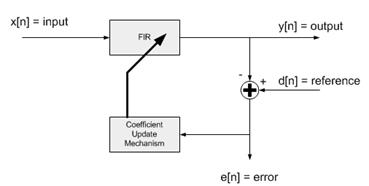
LMS 滤波器由以下两个部分组成。第一部分是 FIR 滤波器。第二部分是系数更新机制。LMS 滤波器具有两个输入信号。x[n] 是FIR 滤波器输入,而参考输入d[n]对应 FIR 滤波器的预期输出。更新 FIR滤波器系数,以便 FIR滤波器的输出与参考输入匹配。滤波器系数更新机制基于 FIR 滤波器输出和参考输入之间的差异。当滤波器调整时,"错误信号"e[n]倾向于为零。LMS 处理功能接受输入和参考输入信号,并生成滤波器输出和错误信号。
输出信号 y[n] 由标准 FIR 滤波器计算:
y[n] = b[0] * x[n] + b[1] * x[n-1] + b[2] * x[n-2] + ...+ b[numTaps-1] * x[n-numTaps+1]
误差信号等于参考信号 d[n] 和滤波器输出之间的差值:
e[n] = d[n] - y[n]。
在计算每个样本的误差信号后,计算滤波器状态变量的瞬时能量:
E = x[n]^2 + x[n-1]^2 + ... + x[n-numTaps+1]^2。
然后在逐个样本的基础上更新滤波器系数 b[k]:
b[k] = b[k] + e[n] * (mu/E) * x[n-k],对于 k=0, 1, ..., numTaps-1
其中 mu 是步长,并且控制系数收敛速度。在函数arm_lms_norm_init_f32中,pCoeffs 指向大小为 numTaps 的滤波器系数数组。系数按时间倒序存储:
{b[numTaps-1], b[numTaps-2], b[N-2], ..., b[1], b[0]}
pState 指向一个大小为 numTaps + blockSize - 1 的状态数组。 状态缓冲区中的样本按顺序存储:
{x[n-numTaps+1], x[n-numTaps], x[n-numTaps-1], x[n-numTaps-2]....x[0], x[1], .. ., x[blockSize-1]}
注意,状态缓冲区的长度超过了滤波器系数数组的长度 blockSize-1 个样本。
49.4 Matlab自适应滤波器实现
首先创建两个混合信号,便于更好测试滤波器效果。
混合信号Mix_Signal_1 = 信号Signal_Original_1+白噪声。
混合信号Mix_Signal_2 = 信号Signal_Original_2+白噪声。
Fs = 1000; %采样率 N = 1000; %采样点数 n = 0:N-1; t = 0:1/Fs:1-1/Fs; %时间序列 Signal_Original_1 =sin(2*pi*10*t)+sin(2*pi*20*t)+sin(2*pi*30*t); Noise_White_1 = [0.3*randn(1,500), rand(1,500)]; %前500点高斯分部白噪声,后500点均匀分布白噪声 Mix_Signal_1 = Signal_Original_1 + Noise_White_1; %构造的混合信号 Signal_Original_2 = [zeros(1,100), 20*ones(1,20), -2*ones(1,30), 5*ones(1,80), -5*ones(1,30), 9*ones(1,140), -4*ones(1,40), 3*ones(1,220), 12*ones(1,100), 5*ones(1,20), 25*ones(1,30), 7 *ones(1,190)]; Noise_White_2 = 0.5*randn(1,1000); %高斯白噪声 Mix_Signal_2 = Signal_Original_2 + Noise_White_2; %构造的混合信号
滤波代码实现如下:
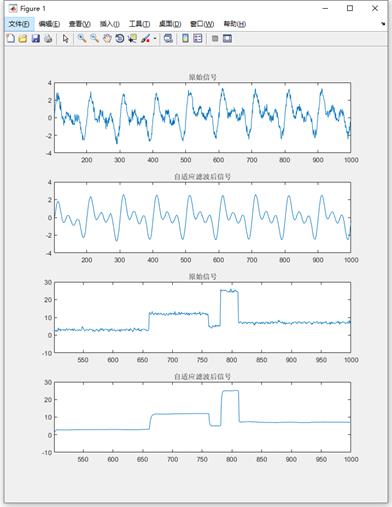
%**************************************************************************************** % % 信号Mix_Signal_1 和 Mix_Signal_2 分别作自适应滤波 % %*************************************************************************************** %混合信号 Mix_Signal_1 自适应滤波 N=1000; %输入信号抽样点数N k=100; %时域抽头LMS算法滤波器阶数 u=0.001; %步长因子 %设置初值 yn_1=zeros(1,N); %output signal yn_1(1:k)=Mix_Signal_1(1:k); %将输入信号SignalAddNoise的前k个值作为输出yn_1的前k个值 w=zeros(1,k); %设置抽头加权初值 e=zeros(1,N); %误差信号 %用LMS算法迭代滤波 for i=(k+1):N XN=Mix_Signal_1((i-k+1):(i)); yn_1(i)=w*XN\'; e(i)=Signal_Original_1(i)-yn_1(i); w=w+2*u*e(i)*XN; end subplot(4,1,1); plot(Mix_Signal_1); %Mix_Signal_1 原始信号 axis([k+1,1000,-4,4]); title(\'原始信号\'); subplot(4,1,2); plot(yn_1); %Mix_Signal_1 自适应滤波后信号 axis([k+1,1000,-4,4]); title(\'自适应滤波后信号\'); %混合信号 Mix_Signal_2 自适应滤波 N=1000; %输入信号抽样点数N k=500; %时域抽头LMS算法滤波器阶数 u=0.000011; %步长因子 %设置初值 yn_1=zeros(1,N); %output signal yn_1(1:k)=Mix_Signal_2(1:k); %将输入信号SignalAddNoise的前k个值作为输出yn_1的前k个值 w=zeros(1,k); %设置抽头加权初值 e=zeros(1,N); %误差信号 %用LMS算法迭代滤波 for i=(k+1):N XN=Mix_Signal_2((i-k+1):(i)); yn_1(i)=w*XN\'; e(i)=Signal_Original_2(i)-yn_1(i); w=w+2*u*e(i)*XN; end subplot(4,1,3); plot(Mix_Signal_2); %Mix_Signal_1 原始信号 axis([k+1,1000,-10,30]); title(\'原始信号\'); subplot(4,1,4); plot(yn_1); %Mix_Signal_1 自适应滤波后信号 axis([k+1,1000,-10,30]); title(\'自适应滤波后信号\');
Matlab运行效果:
49.5 自适应器设计
自适应滤波器的主要通过下面两个函数实现,支持逐点实时滤波。
49.5.1 函数arm_lms_norm_init_f32
函数原型:
void arm_lms_norm_init_f32( arm_lms_norm_instance_f32 * S, uint16_t numTaps, float32_t * pCoeffs, float32_t * pState, float32_t mu, uint32_t blockSize);
函数描述:
此函数用于自适应滤波器初始化。
函数参数:
- 第1个参数是arm_lms_norm_instance_f32类型结构体变量。
- 第2个参数是滤波因数个数。
- 第3个参数是滤波因数地址。
- 第4个参数指向状态变量数组,这个数组用于函数内部计算数据的缓存。
- 第5个参数用于设置滤波因数更新的步长。
- 第6个参数是每次处理的数据个数,最小可以每次处理1个数据,最大可以每次全部处理完。
49.5.2 函数arm_lms_norm_f32
函数原型:
void arm_lms_norm_f32( arm_lms_norm_instance_f32 * S, const float32_t * pSrc, float32_t * pRef, float32_t * pOut, float32_t * pErr, uint32_t blockSize);
函数描述:
此函数用于自适应滤波器实时滤波。
函数参数:
- 第1个参数是arm_lms_norm_instance_f32类型结构体变量。
- 第2个参数是源数据地址。
- 第3个参数是参考数据地址,需要用户提供想要逼近的波形效果。
- 第4个参数是输出数据地址。
- 第5个参数是误差数据地址。
- 第6个参数是每次处理的数据个数,最小可以每次处理1个数据,最大可以每次全部处理完。
注意事项:
结构体arm_lms_norm_instance_f32的定义如下(在文件arm_math.h文件):
typedef struct { uint16_t numTaps; /**< number of coefficients in the filter. */ float32_t *pState; /**< points to the state variable array. The array is of length numTaps+blockSize-1. */ float32_t *pCoeffs; /**< points to the coefficient array. The array is of length numTaps. */ float32_t mu; /**< step size that control filter coefficient updates. */ float32_t energy; /**< saves previous frame energy. */ float32_t x0; /**< saves previous input sample. */ } arm_lms_norm_instance_f32;
1、参数numTaps用于设置滤波因数个数。
2、pState指向状态变量数组,这个数组用于函数内部计算数据的缓存。
3、参数pCoeffs指向滤波因数,滤波因数数组长度为numTaps。但要注意pCoeffs指向的滤波因数应该按照如下的逆序进行排列:
{b[numTaps-1], b[numTaps-2], b[N-2], ..., b[1], b[0]}
但满足线性相位特性的FIR滤波器具有奇对称或者偶对称的系数,偶对称时逆序排列还是他本身。
4、参数mu用于设置滤波因数更新的步长。
5、blockSize 这个参数的大小没有特殊要求,最小可以每次处理1个数据,最大可以每次全部处理完。
49.5.3 滤除200Hz正弦波测试(含不同步长测试,重要)
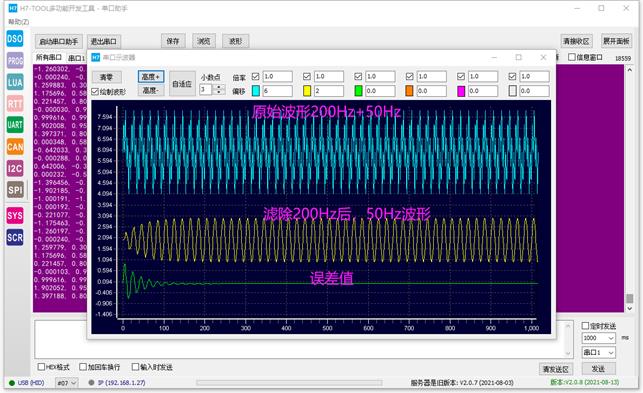
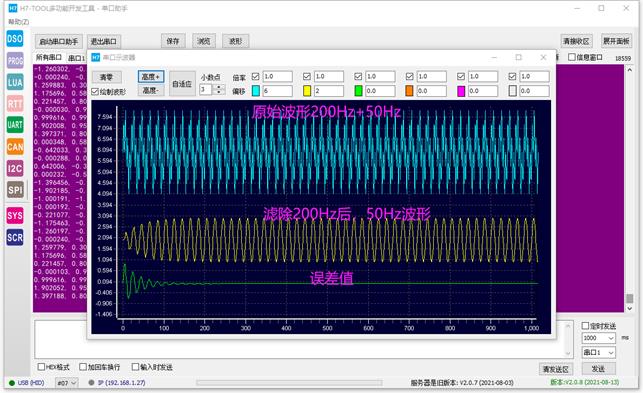
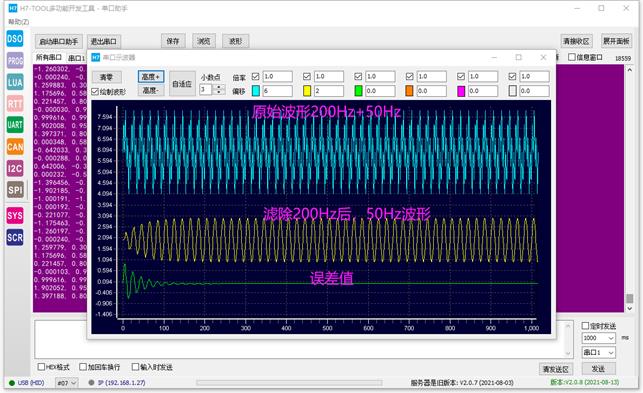
原始波形200Hz + 50Hz正弦波,滤除200Hz正弦波测试:
/* ********************************************************************************************************* * 函 数 名: arm_lms_f32_test1 * 功能说明: 原始波形200Hz + 50Hz正弦波,滤除200Hz正弦波。 * 形 参: 无 * 返 回 值: 无 ********************************************************************************************************* */ void arm_lms_f32_test1(void) { uint32_t i; float32_t *inputF32, *outputF32, *inputREF, *outputERR; arm_lms_norm_instance_f32 lmsS={0}; for(i=0; i<TEST_LENGTH_SAMPLES; i++) { /* 50Hz正弦波+200Hz正弦波,采样率1KHz */ testInput_f32_50Hz_200Hz[i] = arm_sin_f32(2*3.1415926f*50*i/1000) + arm_sin_f32(2*3.1415926f*200*i/1000); testInput_f32_REF[i] = arm_sin_f32(2*3.1415926f*50*i/1000); } /* 如果是实时性的滤波,仅需清零一次 */ memset(lmsCoeffs32,0,sizeof(lmsCoeffs32)); memset(lmsStateF32,0,sizeof(lmsStateF32)); /* 初始化输入输出缓存指针 */ inputF32 = (float32_t *)&testInput_f32_50Hz_200Hz[0]; /* 原始波形 */ outputF32 = (float32_t *)&testOutput[0]; /* 滤波后输出波形 */ inputREF = (float32_t *)&testInput_f32_REF[0]; /* 参考波形 */ outputERR = (float32_t *)&test_f32_ERR[0]; /* 误差数据 */ /* 归一化LMS初始化 */ arm_lms_norm_init_f32 (&lmsS, /* LMS结构体 */ NUM_TAPS, /* 滤波器系数个数 */ (float32_t *)&lmsCoeffs32[0], /* 滤波 */ &lmsStateF32[0], /* 滤波器系数 */ 0.1, /* 步长 */ blockSize); /* 处理的数据个数 */ /* 实现LMS自适应滤波,这里每次处理1个点 */ for(i=0; i < numBlocks; i++) { arm_lms_norm_f32(&lmsS, /* LMS结构体 */ inputF32 + (i * blockSize), /* 输入数据 */ inputREF + (i * blockSize), /* 输出数据 */ outputF32 + (i * blockSize), /* 参考数据 */ outputERR + (i * blockSize), /* 误差数据 */ blockSize); /* 处理的数据个数 */ } /* 打印滤波后结果 */ for(i=0; i<TEST_LENGTH_SAMPLES; i++) { printf("%f, %f, %f\\r\\n", testInput_f32_50Hz_200Hz[i], outputF32[i], test_f32_ERR[i]); } }
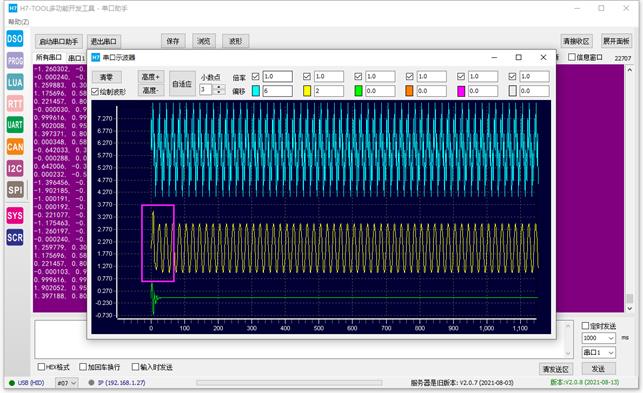
下面是滤波因数步长调节为0.1时的滤波器效果,浅蓝色是原始波形,黄色黄色是滤波后波形,绿色是误差值:
步长为0.01时效果,可以看到逼近参考波形的速度较慢:
步长为1的效果,逼近参考波形的速度更快,前面的波形由一段陡增。
关于步长,没有特别好的方式直接锁定那种步长大小更合适,一般的处理思路是按照10倍关系先锁定范围,比如先测试步长为1,0.1,0.001等来测试,然后进一步设置一个合适的值。
49.5.4 滤除白噪声测试(一)
原始波形由任意波形+ 高斯分布白噪声 + 均匀分布白噪声组成,滤除高斯分布白噪声 + 均匀分布白噪声。
/* ********************************************************************************************************* * 函 数 名: arm_lms_f32_test2 * 功能说明: 原始波形由任意波形+ 高斯分布白噪声 + 均匀分布白噪声组成,滤除高斯分布白噪声 + 均匀分布白噪声。 * 形 参: 无 * 返 回 值: 无 ********************************************************************************************************* */ void arm_lms_f32_test2(void) { uint32_t i; arm_lms_norm_instance_f32 lmsS; float32_t *inputF32, *outputF32, *inputREF, *outputERR; /* 如果是实时性的滤波,仅需清零一次 */ memset(lmsCoeffs32,0,sizeof(lmsCoeffs32)); memset(lmsStateF32,0,sizeof(lmsStateF32)); /* 初始化输入输出缓存指针 */ inputF32 = (float32_t *)&MixData[0]; /* 原始波形 */ outputF32 = (float32_t *)&testOutput[0]; /* 滤波后输出波形 */ inputREF = (float32_t *)&OrigalData[0]; /* 参考波形 */ outputERR = (float32_t *)&test_f32_ERR[0]; /* 误差数据 */ /* 归一化LMS初始化 */ arm_lms_norm_init_f32 (&lmsS, /* LMS结构体 */ NUM_TAPS, /* 滤波器系数个数 */ (float32_t *)&lmsCoeffs32[0], /* 滤波 */ &lmsStateF32[0], /* 滤波器系数 */ 0.01, /* 步长 */ blockSize); /* 处理的数据个数 */ /* 实现LMS自适应滤波,这里每次处理1个点 */ for(i=0; i < numBlocks; i++) { arm_lms_norm_f32(&lmsS, /* LMS结构体 */ inputF32 + (i * blockSize), /* 输入数据 */ inputREF + (i * blockSize), /* 输出数据 */ outputF32 + (i * blockSize), /* 参考数据 */ outputERR + (i * blockSize), /* 误差数据 */ blockSize); /* 处理的数据个数 */ } /* 打印滤波后结果 */ for(i=0; i<TEST_LENGTH_SAMPLES; i++) { printf("%f, %f, %f\\r\\n", MixData[i], outputF32[i], test_f32_ERR[i]); } }
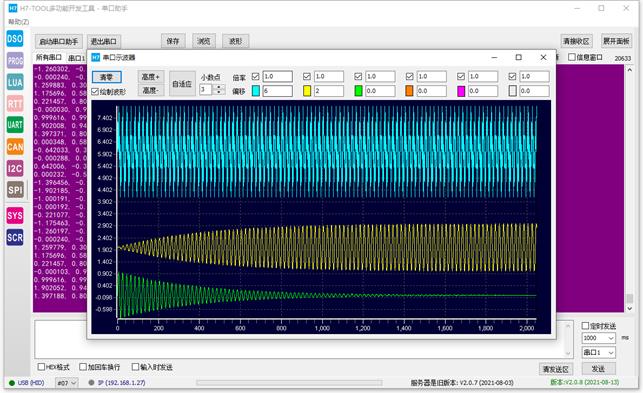
下面是滤波因数步长调节为0.01时的滤波器效果,浅蓝色是原始波形,黄色黄色是滤波后波形,绿色是误差值:
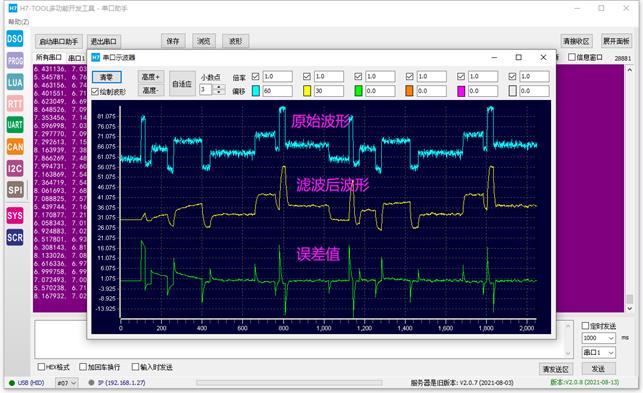
这个波形做了两个周期,前1024点和后1024点,后面1024点滤除白噪声的效果已经比较好,而前1024的点的前半段一直在逼近我们设置的参考波形中。另外从误差值波形中,我们可以看到原始波形跳变的地方,误差值也会有一个跳变,然后向0趋近。这是自适应滤波器特性决定的,不断的调节滤波器系数中。
我们再来看下将滤波因数步长调节为0.1时的效果:
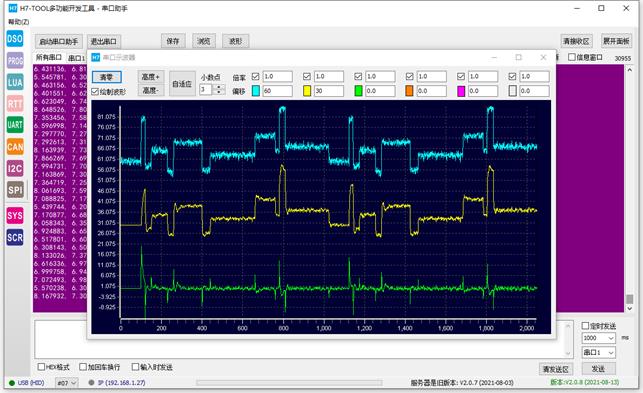
可以看到逼近速度很快,但是逼近效果一般,也就是白噪声的滤除效果一般。
49.5.5 滤除白噪声测试(二)
原始波形10Hz正弦波 + 20Hz正弦波 + 30Hz正弦波 + 高斯分布白噪声 + 均匀分布白噪声。滤除高斯分布白噪声 + 均匀分布白噪声。
/* ********************************************************************************************************* * 函 数 名: arm_lms_f32_test3 * 功能说明: 10Hz正弦波 + 20Hz正弦波 + 30Hz正弦波 + 高斯分布白噪声 + 均匀分布白噪声,滤除高斯分布白噪声 + 均匀分布白噪声 * 形 参: 无 * 返 回 值: 无 ********************************************************************************************************* */ void arm_lms_f32_test3(void) { uint32_t i; arm_lms_norm_instance_f32 lmsS; float32_t *inputF32, *outputF32, *inputREF, *outputERR; /* 如果是实时性的滤波,仅需清零一次 */ memset(lmsCoeffs32,0,sizeof(lmsCoeffs32)); memset(lmsStateF32,0,sizeof(lmsStateF32)); /* 初始化输入输出缓存指针 */ inputF32 = (float32_t *)&MixData1[0]; /* 原始波形 */ outputF32 = (float32_t *)&testOutput[0]; /* 滤波后输出波形 */ inputREF = (float32_t *)&OrigalData1[0]; /* 参考波形 */ outputERR = (float32_t *)&test_f32_ERR[0]; /* 误差数据 */ /* 归一化LMS初始化 */ arm_lms_norm_init_f32 (&lmsS, /* LMS结构体 */ NUM_TAPS, /* 滤波器系数个数 */ (float32_t *)&lmsCoeffs32[0], /* 滤波 */ &lmsStateF32[0], /* 滤波器系数 */ 0.1, /* 步长 */ blockSize); /* 处理的数据个数 */ /* 实现LMS自适应滤波,这里每次处理1个点 */ for(i=0; i < numBlocks; i++) { arm_lms_norm_f32(&lmsS, /* LMS结构体 */ inputF32 + (i * blockSize), /* 输入数据 */ inputREF + (i * blockSize), /* 输出数据 */ outputF32 + (i * blockSize), /* 参考数据 */ outputERR + (i * blockSize), /* 误差数据 */ blockSize); /* 处理的数据个数 */ } /* 打印滤波后结果 */ for(i=0; i<TEST_LENGTH_SAMPLES; i++) { printf("%f, %f, %f\\r\\n", MixData1[i], outputF32[i], test_f32_ERR[i]); } }
下面是滤波因数步长调节为0.1时的滤波器效果,浅蓝色是原始波形,黄色黄色是滤波后波形,绿色是误差值:

49.6 实验例程说明(MDK)
配套例子:
V5-234_自适应滤波器实现,无需Matlab生成系数(支持实时滤波)
实验目的:
- 学习LMS最小均方滤波器。
实验内容:
- 启动一个自动重装软件定时器,每100ms翻转一次LED2。
- 按下按键K1,打印测试波形1和滤波后的波形数据。
- 按下按键K2,打印测试波形2和滤波后的波形数据。
- 按下按键K3,打印测试波形3和滤波后的波形数据。
使用AC6注意事项
特别注意附件章节C的问题
上电后串口打印的信息:
波特率 115200,数据位 8,奇偶校验位无,停止位 1。
RTT方式打印信息:
程序设计:
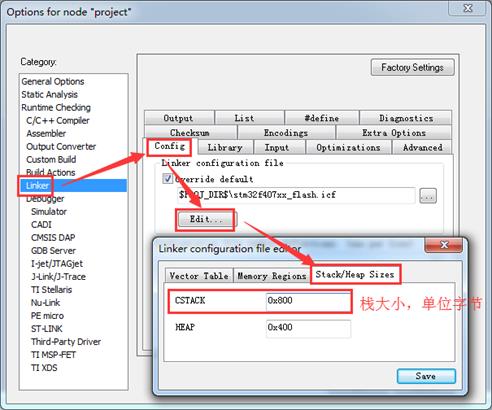
系统栈大小分配:

硬件外设初始化
硬件外设的初始化是在 bsp.c 文件实现:
/* ********************************************************************************************************* * 函 数 名: bsp_Init * 功能说明: 初始化所有的硬件设备。该函数配置CPU寄存器和外设的寄存器并初始化一些全局变量。只需要调用一次 * 形 参:无 * 返 回 值: 无 ********************************************************************************************************* */ void bsp_Init(void) { /* STM32F407 HAL 库初始化,此时系统用的还是F407自带的16MHz,HSI时钟: - 调用函数HAL_InitTick,初始化滴答时钟中断1ms。 - 设置NVIC优先级分组为4。 */ HAL_Init(); /* 配置系统时钟到168MHz - 切换使用HSE。 - 此函数会更新全局变量SystemCoreClock,并重新配置HAL_InitTick。 */ SystemClock_Config(); /* Event Recorder: - 可用于代码执行时间测量,MDK5.25及其以上版本才支持,IAR不支持。 - 默认不开启,如果要使能此选项,务必看V5开发板用户手册第8章 */ #if Enable_EventRecorder == 1 /* 初始化EventRecorder并开启 */ EventRecorderInitialize(EventRecordAll, 1U); EventRecorderStart(); #endif bsp_InitKey(); /* 按键初始化,要放在滴答定时器之前,因为按钮检测是通过滴答定时器扫描 */ bsp_InitTimer(); /* 初始化滴答定时器 */ bsp_InitUart(); /* 初始化串口 */ bsp_InitLed(); /* 初始化LED */ }
主功能:
主程序实现如下操作:
- 启动一个自动重装软件定时器,每100ms翻转一次LED2。
- 按下按键K1,打印测试波形1和滤波后的波形数据。
- 按下按键K2,打印测试波形2和滤波后的波形数据。
- 按下按键K3,打印测试波形3和滤波后的波形数据。
/* ********************************************************************************************************* * 函 数 名: main * 功能说明: c程序入口 * 形 参: 无 * 返 回 值: 错误代码(无需处理) ********************************************************************************************************* */ int main(void) { uint8_t ucKeyCode; /* 按键代码 */ uint16_t i; bsp_Init(); /* 硬件初始化 */ PrintfLogo(); /* 打印例程信息到串口1 */ PrintfHelp(); /* 打印操作提示信息 */ bsp_StartAutoTimer(0, 100); /* 启动1个100ms的自动重装的定时器 */ /* 进入主程序循环体 */ while (1) { bsp_Idle(); /* 这个函数在bsp.c文件。用户可以修改这个函数实现CPU休眠和喂狗 */ if (bsp_CheckTimer(0)) /* 判断定时器超时时间 */ { /* 每隔100ms 进来一次 */ bsp_LedToggle(2); /* 翻转LED的状态 */ } ucKeyCode = bsp_GetKey(); /* 读取键值, 无键按下时返回 KEY_NONE = 0 */ if (ucKeyCode != KEY_NONE) { switch (ucKeyCode) { case KEY_DOWN_K1: /* K1键按下 */ arm_lms_f32_test1(); break; case KEY_DOWN_K2: /* K2键按下 */ arm_lms_f32_test2(); break; case KEY_DOWN_K3: /* K3键按下 */ arm_lms_f32_test3(); break; default: /* 其它的键值不处理 */ break; } } } }
49.7 实验例程说明(IAR)
配套例子:
V5-234_自适应滤波器实现,无需Matlab生成系数(支持实时滤波)
实验目的:
- 学习LMS最小均方滤波器。
实验内容:
- 启动一个自动重装软件定时器,每100ms翻转一次LED2。
- 按下按键K1,打印测试波形1和滤波后的波形数据。
- 按下按键K2,打印测试波形2和滤波后的波形数据。
- 按下按键K3,打印测试波形3和滤波后的波形数据。
上电后串口打印的信息:
波特率 115200,数据位 8,奇偶校验位无,停止位 1。
RTT方式打印信息:
程序设计:
系统栈大小分配:
硬件外设初始化
硬件外设的初始化是在 bsp.c 文件实现:
/* ********************************************************************************************************* * 函 数 名: bsp_Init * 功能说明: 初始化所有的硬件设备。该函数配置CPU寄存器和外设的寄存器并初始化一些全局变量。只需要调用一次 * 形 参:无 * 返 回 值: 无 ********************************************************************************************************* */ void bsp_Init(void) { /* STM32F407 HAL 库初始化,此时系统用的还是F407自带的16MHz,HSI时钟: - 调用函数HAL_InitTick,初始化滴答时钟中断1ms。 - 设置NVIC优先级分组为4。 */ HAL_Init(); /* 配置系统时钟到168MHz - 切换使用HSE。 - 此函数会更新全局变量SystemCoreClock,并重新配置HAL_InitTick。 */ SystemClock_Config(); /* Event Recorder: - 可用于代码执行时间测量,MDK5.25及其以上版本才支持,IAR不支持。 - 默认不开启,如果要使能此选项,务必看V5开发板用户手册第8章 */ #if Enable_EventRecorder == 1 /* 初始化EventRecorder并开启 */ EventRecorderInitialize(EventRecordAll, 1U); EventRecorderStart(); #endif bsp_InitKey(); /* 按键初始化,要放在滴答定时器之前,因为按钮检测是通过滴答定时器扫描 */ bsp_InitTimer(); /* 初始化滴答定时器 */以上是关于STM32F407的DSP教程第49章 STM32F407的自适应滤波器实现,无需Matlab生成系数(支持实时滤波)的主要内容,如果未能解决你的问题,请参考以下文章