图元
Posted LiF
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了图元相关的知识,希望对你有一定的参考价值。
目前的图形学研究都绕不开几何图元,其中个人学习中比较难以理解的是隐式曲线和曲面,与之对应的偏导、梯度等几何信息,以及与模型表示最为密切的三角形,因此写下此篇总结,供复习回顾。
隐式曲线曲面
2D曲线最符合直觉的定义可以是:在一张纸上一笔所画出的一条线,而这条线可以表示为一系列点的集合。对于一般情形,用一个方程可以描述任意二维实曲线:
由于这条曲线是在方程中隐式定义的,因此也称为隐式曲线。
常见的隐式曲线有:
隐式直线:
隐式二次曲线:
如隐式椭圆:
3D隐式曲面与2D隐式曲线类似,可用隐函数
定义3D隐式曲面,函数的解集即为曲面上所有点的集合,我们可以通过隐函数判断点是否在面上,但大多数时候我们无法显化其表达式,即无法显式构造位于面上的点。
为方便表示,记 \\(\\textbf{p}=(x,y,z)\\) ,则
常见的隐式曲面:
隐式平面:已知平面包含点 \\(a\\) ,且法向量为 \\(\\textbf{n}\\) ,则平面方程为
3D隐式二次曲面如椭球面:
由方程组定义的3D隐式曲线 (曲面的交线):
梯度
梯度是一个重要的度量,在几何领域,除了用梯度描述变化之外,梯度还经常用于求法线等操作。
对于一维的情况,我们可以用极限定义导数为切线斜率。而一个二维函数并不能做类似一维情况下的极限运算,因为对于给定的 \\(x\\) ,\\(f\\) 的变化方式多种多样,而如果我们把 \\(y\\) 视为常数,则可以定义一个类似导数概念,这就是偏导数 (Partial Derivatives):
如果把函数值当成第三维,那么可以表示为一个高度场,此时 \\((x,y,f(x,y))\\) 是一个三维表面。在 \\(xOy\\) 平面上任意指定一个方向,我们都可以定义一个该表面的导数,该导数值是沿这样一个方向的导数,这个方向在 \\(xOy\\) 平面的投影为我们所指定的方向,这就是方向导数 (Directional Derivatives)。对应回二维的情况,这里实质上是对导数做了推广。对 \\(x\\)求导,实际上是求沿 \\(x\\) 方向的函数变化率,既然是对方向求导,自然可以推广到沿任意方向求导,也就是方向导数。 (但其实有细微区别,通常讨论的可求导或偏导,指的是沿轴向双向均可导且导数值均相同)
设 \\(l\\) 是 \\(xOy\\) 平面上以 \\(P_0(x_0,y_0)\\) 为始点的一条射线, \\(e_l=(\\cos\\alpha,\\cos\\beta)\\) 是与 \\(l\\) 同方向的单位向量 (方向余弦表示),射线 \\(l\\) 的参数方程为
则方向导数可定义为
在可微条件下,有
故
基于方向导数可以定义梯度。梯度 (Gradients)是一个向量,它指示的就是这样一个方向:从当前点出发在曲线上运动时,沿该方向运动,高度爬升得最快,变化率最快,或者说,方向导数最大。可以定义梯度
其中, \\(\\nabla={\\partial\\over\\partial x}\\ \\textbf{i}+{\\partial\\over\\partial y}\\ \\textbf{j}\\) 为向量微分算子Nabla。
根据方向导数的定义可知,
由于射线的方向向量是单位向量,因此最终方向导数可以表示为上式,其中, \\(\\theta\\) 是射线方向向量与梯度方向的夹角。当射线方向与梯度方向相同时,方向导数取得最大值,且最大值为梯度的模。
若取平面 \\(z=c\\) 截该高度场,可得一等值线
对应隐式曲线 \\(f(x,y)=c\\) ,改写为参数形式
隐函数两边对 \\(x\\) 求偏导可得,
对比定义可知,上式点积为0即表明梯度与切向量垂直。
特别地,令 \\(c=0\\) 即原曲线,也即,曲线法向量可用梯度方法求,且有
类似地,3D隐式曲面的法线为
同样地,梯度法所求的法线方向指向的是 \\(f(\\textbf{p})>0\\) 的区域。
参数曲线曲面
有时使用参数方式定义的隐式曲线曲面会更便于计算,同时,参数形式给出了一种构造点的方法。
2D参数曲线通常定义为
如圆
3D参数曲线通常定义为
如螺线
3D参数曲面通常定义为
如球面
三角形与重心坐标
三角形是最基本的图元。由于通常我们只拥有给定的三角形的顶点处的信息,在图形计算中,需要插值以生成可平滑覆盖的像素信息。而三角插值依赖最多的是重心坐标。
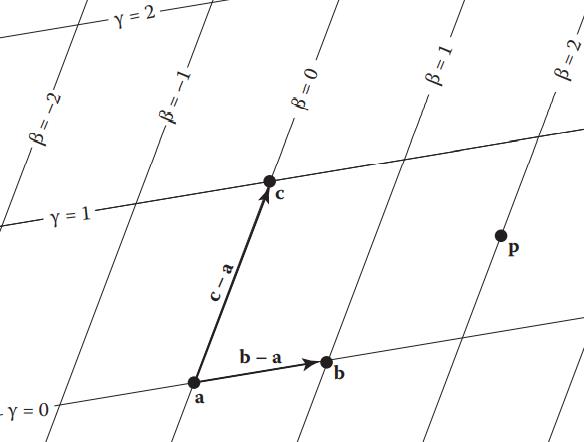
重心坐标 (Barycentric Coordinates)是一个非标准正交的坐标系,其以三角形的一个顶点为坐标原点,以过该点的两边为坐标轴。在三角形所在平面内的任意一点 \\(\\textbf{p}\\) 均可表示为
令 \\(\\alpha=1-\\beta-\\gamma\\) ,整理得一个对称表达的形式
则 \\((\\alpha,\\beta,\\gamma)\\) 称为点 \\(\\textbf{p}\\) 的重心坐标。
利用重心坐标可快速判断点与三角形的位置关系:
- 若坐标分量均位于 \\((0,1)\\) ,则点在三角形内
- 若坐标分量恰有一个为0,且其余两个均位于 \\((0,1)\\) ,则点在三角形上
- 若坐标分量有两个为0,则点与三角形顶点重合
- 除此之外,点在三角形外
由于重心坐标的表达式已给出,则可以得到一个关于坐标的方程组,直接求解即可得到重心坐标。但这种方法没有将其几何意义融入计算。
对于重心坐标的一个理解是:坐标的分量值对应该顶点到其对边的有向比例距离 (Signed Scaled Distance)。
利用之前隐式曲线的知识,对于边 \\(ac\\) ,设其对应隐函数为 \\(f(x,y)=0\\) (这里以二维情况讨论,而其结论可以几乎完全推广到三维情况,只需添加一维坐标即可),而对于函数 \\(d=kf(x,y)\\) ,其表示的正是平面内的点到边 \\(ac\\) 有向比例距离,对比重心坐标可知,我们只需要找到一个 \\(k\\) ,使得 \\(kf(x_b,y_b)=1\\) ,因此我们得以计算重心坐标
代入两点坐标,以直线的一般式表示则有
同理可得 \\(\\gamma\\) 的表达式,再由 \\(\\alpha=1-\\beta-\\gamma\\) 即可计算重心坐标。
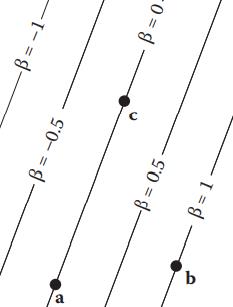
另一种理解重心坐标的方式是面积法。同样考虑边 \\(ac\\) ,以之为底的三角形,以同样的 \\(\\beta\\) 为高时,三角形的面积不变,且当 \\(\\beta=1\\) 时,面积为整个三角形的面积,即
在允许面积带有方向时,该方法也可以表示面内所有的点。又由叉积可得三角形法线和面积
这个面积并非有向面积,所以并不能直接用于面积法求重心坐标。但可以观察到,当三角形的三个顶点绕序不同时,其有向面积的符号也是不同的。因此我们定义
对应由点p、b、c组成的三角形,若p、a均位于bc的一侧,则叉积方向一致,反之则反。又因为所有点均在同一平面内,因此, \\(\\textbf{n}\\) 和 \\(\\textbf{n}_a\\) 平行。那么,
推广到3D情况,此时我们假设涉及的点均为三维空间中的点,上述规则仍然成立。
参考
Fundamental of Computer Graphics 4th Edition, Chapter 2.
以上是关于图元的主要内容,如果未能解决你的问题,请参考以下文章