HarmonyOS之设备传感器的功能和使用
Posted Forever_wj
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了HarmonyOS之设备传感器的功能和使用相关的知识,希望对你有一定的参考价值。
一、基本概念
- HarmonyOS 传感器是应用访问底层硬件传感器的一种设备抽象概念。开发者根据传感器提供的 Sensor API,可以查询设备上的传感器,订阅传感器的数据,并根据传感器数据定制相应的算法,开发各类应用,比如指南针、运动健康、游戏等。
- 根据传感器的用途,可以将传感器分为六大类:运动类传感器、环境类传感器、方向类传感器、光线类传感器、健康类传感器、其他类传感器(如霍尔传感器),每一大类传感器包含不同类型的传感器,某种类型的传感器可能是单一的物理传感器,也可能是由多个物理传感器复合而成。
- 传感器如下表所示:
| 分类 | API类名 | 传感器类型 | 中文描述 | 说明 | 主要用途 |
|---|---|---|---|---|---|
| 运动类 | ohos.sensor.agent. CategoryMotionAgent | SENSOR_TYPE_ACCELEROMETER | 加速度传感器 | 测量三个物理轴(x、y 和 z)上,施加在设备上的加速度(包括重力加速度),单位 : m/s2 | 检测运动状态 |
| SENSOR_TYPE_ACCELEROMETER_UNCALIBRATED | 未校准加速度传感器 | 测量三个物理轴(x、y 和 z)上,施加在设备上的未校准的加速度(包括重力加速度),单位 : m/s2 | 检测加速度偏差估值 | ||
| SENSOR_TYPE_LINEAR_ACCELERATION | 线性加速度传感器 | 测量三个物理轴(x、y 和 z)上,施加在设备上的线性加速度(不包括重力加速度),单位 : m/s2 | 检测每个单轴方向上的线性加速度 | ||
| SENSOR_TYPE_GRAVITY | 重力传感器 | 测量三个物理轴(x、y 和 z)上,施加在设备上的重力加速度,单位 : m/s2 | 测量重力大小 | ||
| SENSOR_TYPE_GYROSCOPE | 陀螺仪传感器 | 测量三个物理轴(x、y 和 z)上,设备的旋转角速度,单位 : rad/s | 测量旋转的角速度 | ||
| SENSOR_TYPE_GYROSCOPE_UNCALIBRATED | 未校准陀螺仪传感器 | 测量三个物理轴(x、y 和 z)上,设备的未校准旋转角速度,单位 : rad/s | 测量旋转的角速度及偏差估值 | ||
| SENSOR_TYPE_SIGNIFICANT_MOTION | 大幅度动作传感器 | 测量三个物理轴(x、y 和 z)上,设备是否存在大幅度运动;如果取值为1则代表存在大幅度运动,取值为0则代表没有大幅度运动 | 用于检测设备是否存在大幅度运动 | ||
| SENSOR_TYPE_DROP_DETECTION | 跌落检测传感器 | 检测设备的跌落状态;如果取值为1则代表发生跌落,取值为0则代表没有发生跌落 | 用于检测设备是否发生了跌落 | ||
| SENSOR_TYPE_PEDOMETER_DETECTION | 计步器检测传感器 | 检测用户的计步动作;如果取值为1则代表用户产生了计步行走的动作;取值为0则代表用户没有发生运动 | 用于检测用户是否有计步的动作 | ||
| SENSOR_TYPE_PEDOMETER | 计步器传感器 | 统计用户的行走步数 | 用于提供用户行走的步数数据 | ||
| 环境类 | ohos.sensor.agent. CategoryEnvironmentAgent | SENSOR_TYPE_AMBIENT_TEMPERATURE | 环境温度传感器 | 测量环境温度,单位 : 摄氏度 (°C) | 测量环境温度 |
| SENSOR_TYPE_MAGNETIC_FIELD | 磁场传感器 | 测量三个物理轴向(x、y、z)上,环境地磁场,单位 : μT | 创建指南针 | ||
| SENSOR_TYPE_MAGNETIC_FIELD_UNCALIBRATED | 未校准磁场传感器 | 测量三个物理轴向(x、y、z)上,未校准环境地磁场,单位 : μT | 测量地磁偏差估值 | ||
| SENSOR_TYPE_HUMIDITY | 湿度传感器 | 测量环境的相对湿度,以百分比 (%) 表示 | 监测露点、绝对湿度和相对湿度 | ||
| SENSOR_TYPE_BAROMETER | 气压计传感器 | 测量环境气压,单位 : hPa 或 mbar | 测量环境气压 | ||
| SENSOR_TYPE_SAR | 比吸收率传感器 | 测量比吸收率,单位:W/kg | 测量设备的电磁波能量吸收比值 | ||
| 方向类 | ohos.sensor.agent. CategoryOrientationAgent | SENSOR_TYPE_6DOF | 6自由度传感器 | 测量上下、前后、左右方向上的位移,单位:m或mm;测量俯仰、偏摆、翻滚的角度,单位:rad | 检测设备的三个平移自由度以及旋转自由度,用于目标定位追踪,如:VR |
| SENSOR_TYPE_SCREEN_ROTATION | 屏幕旋转传感器 | 检测设备屏幕的旋转状态 | 用于检测设备屏幕是否发生了旋转 | ||
| SENSOR_TYPE_DEVICE_ORIENTATION | 设备方向传感器 | 测量设备的旋转方向,单位:rad | 用于检测设备旋转方向的角度值 | ||
| SENSOR_TYPE_ORIENTATION | 方向传感器 | 测量设备围绕所有三个物理轴(x、y、z)旋转的角度值,单位:rad | 用于提供屏幕旋转的3个角度值 | ||
| SENSOR_TYPE_ROTATION_VECTOR | 旋转矢量传感器 | 测量设备旋转矢量,复合传感器:由加速度传感器、磁场传感器、陀螺仪传感器合成 | 检测设备相对于东北天坐标系的方向 | ||
| SENSOR_TYPE_GAME_ROTATION_VECTOR | 游戏旋转矢量传感器 | 测量设备游戏旋转矢量,复合传感器:由加速度传感器、陀螺仪传感器合成 | 应用于游戏场景 | ||
| SENSOR_TYPE_GEOMAGNETIC_ROTATION_VECTOR | 地磁旋转矢量传感器 | 测量设备地磁旋转矢量,复合传感器:由加速度传感器、磁场传感器合成 | 用于测量地磁旋转矢量 | ||
| 光线类 | ohos.sensor.agent. CategoryLightAgent | SENSOR_TYPE_PROXIMITY | 接近光传感器 | 测量可见物体相对于设备显示屏的接近或远离状态 | 通话中设备相对人的位置 |
| SENSOR_TYPE_TOF | ToF传感器 | 测量光在介质中行进一段距离所需的时间 | 人脸识别 | ||
| SENSOR_TYPE_AMBIENT_LIGHT | 环境光传感器 | 测量设备周围光线强度,单位:lux | 自动调节屏幕亮度,检测屏幕上方是否有遮挡 | ||
| SENSOR_TYPE_COLOR_TEMPERATURE | 色温传感器 | 测量环境中的色温 | 应用于设备的影像处理 | ||
| SENSOR_TYPE_COLOR_RGB | RGB颜色传感器 | 测量环境中的RGB颜色值 | 通过三原色的反射比率实现颜色检测 | ||
| SENSOR_TYPE_COLOR_XYZ | XYZ颜色传感器 | 测量环境中的XYZ颜色值 | 用于辨识真色色点,还原色彩更真实 | ||
| 健康类 | ohos.sensor.agent. CategoryBodyAgent | SENSOR_TYPE_HEART_RATE | 心率传感器 | 测量用户的心率数值 | 用于提供用户的心率健康数据 |
| SENSOR_TYPE_WEAR_DETECTION | 佩戴检测传感器 | 检测用户是否佩戴 | 用于检测用户是否佩戴智能穿戴 | ||
| 其他类 | ohos.sensor.agent. CategoryOtherAgent | SENSOR_TYPE_HALL | 霍尔传感器 | 测量设备周围是否存在磁力吸引 | 设备的皮套模式 |
| SENSOR_TYPE_GRIP_DETECTOR | 手握检测传感器 | 检测设备是否有抓力施加 | 用于检查设备侧边是否被手握住 | ||
| SENSOR_TYPE_MAGNET_BRACKET | 磁铁支架传感器 | 检测设备是否被磁吸 | 检测设备是否位于车内或者室内 | ||
| SENSOR_TYPE_PRESSURE_DETECTOR | 按压检测传感器 | 检测设备是否有压力施加 | 用于检测设备的正上方是否存在按压 |
二、运作机制和权限
① 运作机制
- HarmonyOS 传感器包含如下四个模块:Sensor API、Sensor Framework、Sensor Service、HD_IDL 层。
- HarmonyOS 传感器运作机制如下所示:
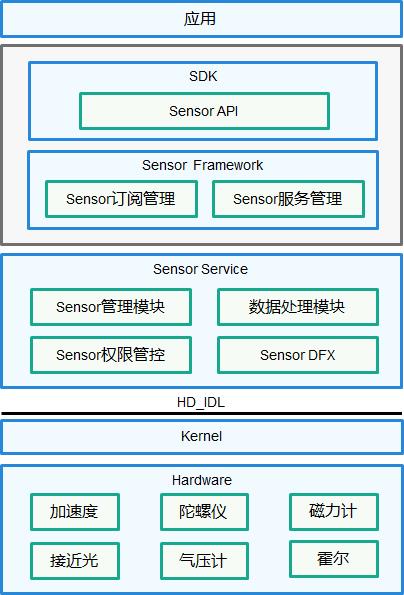
- Sensor API:提供传感器的基础 API,主要包含查询传感器的列表、订阅/取消传感器的数据、执行控制命令等,简化应用开发。
- Sensor Framework:主要实现传感器的订阅管理,数据通道的创建、销毁、订阅与取消订阅,实现与 SensorService 的通信。
- Sensor Service:主要实现 HD_IDL 层数据接收、解析、分发,前后台的策略管控,对该设备 Sensor 的管理,Sensor 权限管控等。
- HD_IDL 层:对不同的 FIFO、频率进行策略选择,以及对不同设备的适配。
② 权限
- 针对某些传感器,开发者需要请求相应的权限,才能获取到相应传感器的数据。
- 传感器权限如下表所示:
| 传感器 | 权限名 | 敏感级别 | 权限描述 |
|---|---|---|---|
| 加速度传感器、加速度未校准传感器、线性加速度传感器 | ohos.permission.ACCELEROMETER | system_grant | 允许订阅Motion组对应的加速度传感器的数据 |
| 陀螺仪传感器、陀螺仪未校准传感器 | ohos.permission.GYROSCOPE | system_grant | 允许订阅Motion组对应的陀螺仪传感器的数据 |
| 计步器 | ohos.permission.ACTIVITY_MOTION | user_grant | 允许订阅运动状态 |
| 心率 | ohos.permission.READ_HEALTH_DATA | user_grant | 允许读取健康数据 |
- 传感器数据订阅和取消订阅接口成对调用,当不再需要订阅传感器数据时,开发者需要调用取消订阅接口进行资源释放。
三、应用场景
- 通过方向传感器数据,可以感知用户设备当前的朝向,从而达到为用户指明方位的目的。
- 通过重力和陀螺仪传感器数据,能感知设备倾斜和旋转量,提高用户在游戏场景中的体验。
- 通过接近光传感器数据,感知距离遮挡物的距离,使设备能够自动亮灭屏,达到防误触目的。
- 通过气压计传感器数据,可以准确的判断设备当前所处的海拔。
- 通过环境光传感器数据,设备能够实现背光自动调节。
- 通过霍尔传感器数据,设备可以实现皮套功能等。
四、传感器的 API
- HarmonyOS 传感器提供的功能有:查询传感器的列表、订阅/取消订阅传感器数据、查询传感器的最小采样时间间隔、执行控制命令。
- CategoryOrientationAgent 接口如下:
| 接口名 | 描述 |
|---|---|
| getAllSensors() | 获取属于方向类别的传感器列表 |
| getAllSensors(int) | 获取属于方向类别中特定类型的传感器列表 |
| getSingleSensor(int) | 查询方向类别中特定类型的默认sensor(如果存在多个则返回第一个) |
| setSensorDataCallback(ICategoryOrientationDataCallback, CategoryOrientation, long) | 以设定的采样间隔订阅给定传感器的数据 |
| setSensorDataCallback(ICategoryOrientationDataCallback, CategoryOrientation, long, long) | 以设定的采样间隔和时延订阅给定传感器的数据 |
| releaseSensorDataCallback(ICategoryOrientationDataCallback, CategoryOrientation) | 取消订阅指定传感器的数据 |
| releaseSensorDataCallback(ICategoryOrientationDataCallback) | 取消订阅的所有传感器数据 |
- SensorAgent 的主要接口如下:
| 接口名 | 描述 |
|---|---|
| getSensorMinSampleInterval(int) | 查询给定传感器的最小采样间隔 |
| runCommand(int, int, int) | 针对某个传感器执行命令,刷新传感器的数据 |
- CategoryEnvironmentData 的主要接口如下:
| 接口名 | 描述 |
|---|---|
| getDeviceAltitude(float, float ) | 根据气压值获取设备所在位置的海拔高度 |
- CategoryOrientationData 的主要接口如下:
| 接口名 | 描述 |
|---|---|
| getDeviceRotationMatrix(float[], float[]) | 根据旋转矢量获取旋转矩阵 |
| getDeviceOrientation(float[], float[]) | 根据旋转矩阵获取设备的方向 |
五、传感器的使用流程
① 权限配置
- 如果设备上使用了上文中“传感器权限列表”中的传感器,需要请求相应的权限,开发者才能获取到传感器数据。
- 不同敏感级别的传感器举例:
| 敏感级别 | 传感器 | 权限名 | 权限描述 |
|---|---|---|---|
| system_grant | 加速度传感器、加速度未校准传感器、线性加速度传感器 | ohos.permission.ACCELEROMETER | 允许订阅Motion组对应的加速度传感器的数据 |
| user_grant | 计步器 | ohos.permission.ACTIVITY_MOTION | 允许订阅运动状态 |
- 需要在 config.json 里面配置权限:
-
- 如果需要获取加速度的数据,需要进行如下权限配置:
"reqPermissions": [
{
"name": "ohos.permission.ACCELEROMETER",
"reason": "",
"usedScene": {
"ability": [
".MainAbility"
],
"when": "inuse"
}
}
]
-
- 对于需要用户授权的权限,如计步器传感器,需要进行如下权限配置:
"reqPermissions": [
{
"name": "ohos.permission.ACTIVITY_MOTION",
"reason": "",
"usedScene": {
"ability": [
".MainAbility"
],
"when": "inuse"
}
}
]
- 由于敏感权限需要用户授权,因此在应用启动时或者调用订阅数据接口前,需要调用权限检查和请求权限接口:
@Override
public void onStart(Intent intent) {
super.onStart(intent);
if (verifySelfPermission("ohos.permission.ACTIVITY_MOTION") != 0) {
if (canRequestPermission("ohos.permission.ACTIVITY_MOTION")) {
requestPermissionsFromUser(new String[] {"ohos.permission.ACTIVITY_MOTION"}, 1);
}
}
// ...
}
@Override
public void onRequestPermissionsFromUserResult(int requestCode, String[] permissions,
int[] grantResults) {
// 匹配requestPermissionsFromUser的requestCode
if (requestCode == 1) {
if (grantResults.length > 0 && grantResults[0] == 0) {
// 权限被授予
} else {
// 权限被拒绝
}
}
}
② 使用传感器
- 以使用方向类别的传感器为例,运动类、环境类、健康类等类别的传感器使用方法类似:
-
- 获取待订阅数据的传感器。
-
- 创建传感器回调。
-
- 订阅传感器数据。
-
- 接收并处理传感器数据。
-
- 取消订阅传感器数据。
private static final long INTERVAL = 100000000L;
private Button btnSubscribe;
private Button btnUnsubscribe;
private CategoryOrientationAgent categoryOrientationAgent = new CategoryOrientationAgent();
private ICategoryOrientationDataCallback orientationDataCallback;
private CategoryOrientation orientationSensor;
private int matrix_length = 9;
private int rotationVectorLength = 9;
@Override
public void onStart(Intent intent) {
super.onStart(intent);
super.setUIContent(ResourceTable.Layout_sensor_layout);
findComponent(rootComponent);
// 创建传感器回调对象。
orientationDataCallback = new ICategoryOrientationDataCallback() {
@Override
public void onSensorDataModified(CategoryOrientationData categoryOrientationData) {
// 对接收的categoryOrientationData传感器数据对象解析和使用
int dim = categoryOrientationData.getSensorDataDim(); // 获取传感器的维度信息
float degree = categoryOrientationData.getValues()[0]; // 获取方向类传感器的第一维数据
float[] rotationMatrix = new float[matrix_length];
CategoryOrientationData.getDeviceRotationMatrix(rotationMatrix, categoryOrientationData.values); // 根据旋转矢量传感器的数据获得旋转矩阵
float[] rotationAngle = new float[rotationVectorLength];
rotationAngle = CategoryOrientationData.getDeviceOrientation(rotationMatrix, rotationAngle); // 根据计算出来的旋转矩阵获取设备的方向
}
@Override
public void onAccuracyDataModified(CategoryOrientation categoryOrientation, int index) {
// 使用变化的精度
}
@Override
public void onCommandCompleted(CategoryOrientation categoryOrientation) {
// 传感器执行命令回调
}
};
btnSubscribe.setClickedListener(v -> {
// 获取传感器对象,并订阅传感器数据
orientationSensor = categoryOrientationAgent.getSingleSensor(
CategoryOrientation.SENSOR_TYPE_ORIENTATION);
if (orientationSensor != null) {
categoryOrientationAgent.setSensorDataCallback(
orientationDataCallback, orientationSensor, INTERVAL);
}
});
// 取消订阅传感器数据
btnUnsubscribe.setClickedListener(v -> {
if (orientationSensor != null) {
categoryOrientationAgent.releaseSensorDataCallback(
orientationDataCallback, orientationSensor);
}
});
}
private void findComponent(Component component) {
btnSubscribe = (Button) component.findComponentById(ResourceTable.Id_btnSubscribe);
btnUnsubscribe = (Button) component.findComponentById(ResourceTable.Id_btnUnsubscribe);
}
以上是关于HarmonyOS之设备传感器的功能和使用的主要内容,如果未能解决你的问题,请参考以下文章