学会CycleGAN进行风格迁移,实现自定义滤镜
Posted 盼小辉丶
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了学会CycleGAN进行风格迁移,实现自定义滤镜相关的知识,希望对你有一定的参考价值。
前言
我们已经在多篇博客中讲解了有关CycleGAN的原理,同时也应用CycleGAN完成了多种有趣的应用,包括图片上色以及性别转换,那么CycleGAN在风格迁移的应用中有怎样的表现呢?
在本文中我们将利用CycleGAN实现风格迁移的应用,来探索CycleGAN的更多可能性。
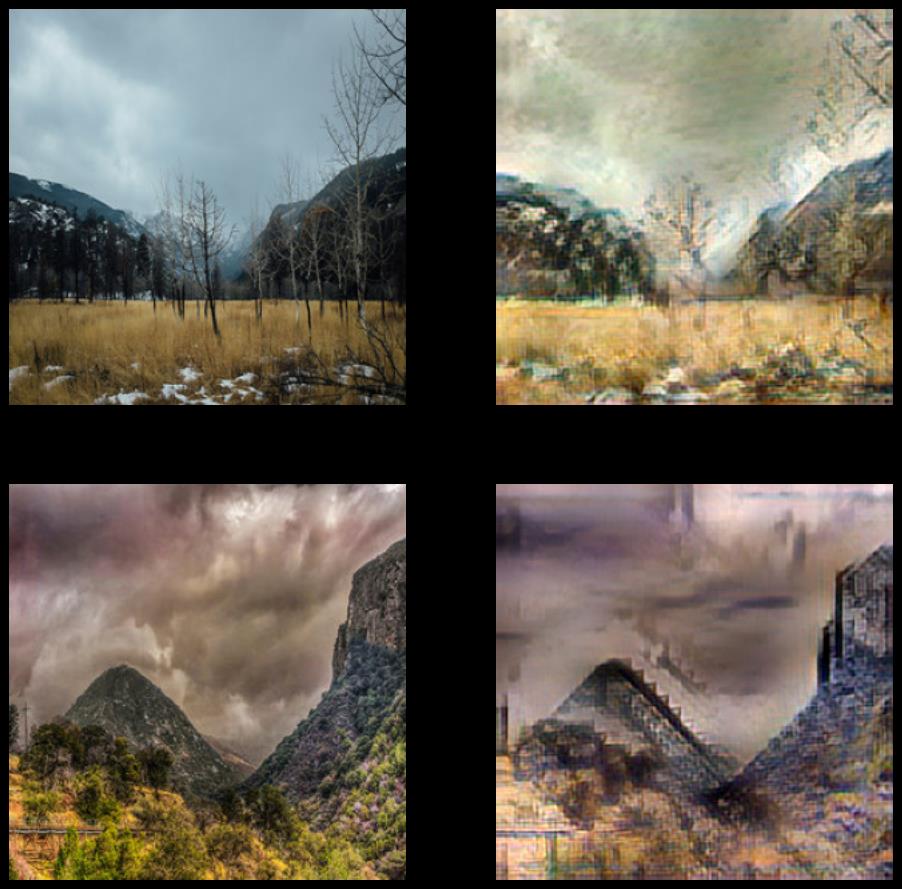
效果展示
说的效果这么好,真实情况如何呢,真的可以做出足以以假乱真的油画风格的图片么?那么我们首先看下模型的训练效果吧!
数据集介绍与加载
本项目,使用莫奈绘画和自然照片数据集来训练CycleGAN,该数据集来自UC Berkeley的CycleGAN数据集官方目录,同时也可以使用其他风格图片,包括梵高绘画等。
dataset_name = 'vangogh2photo'
dataset, ds_info = tfds.load(f'cycle_gan/{dataset_name}', with_info=True, as_supervised=True)
train_vangogh, train_photo = dataset['trainA'], dataset['trainB']
test_vangogh, test_photo = dataset['testA'], dataset['testB']
CycleGAN模型
简单回顾下 CycleGAN 的原理,其模型的精髓主要是利用循环一致性损失,训练两个生成器—鉴别器对,从而实现了用不成对数据进行图像到图像的翻译。
数据预处理
数据预处理环节,首先将图片进行规范化至 [0, 1] 范围内,并且将图片缩放为模型可接受的尺寸。
# normalizing the images to [-1, 1]
def normalize(image):
image = tf.cast(image, tf.float32)
image = (image / 127.5) - 1
return image
def preprocess(image, label):
image = tf.image.resize(image, [IMG_WIDTH, IMG_HEIGHT])
image = normalize(image)
return image
train_vangogh = train_vangogh.map(preprocess, num_parallel_calls=AUTOTUNE).shuffle(BUFFER_SIZE).batch(BATCH_SIZE, drop_remainder=True).repeat()
train_photo = train_photo.map(preprocess, num_parallel_calls=AUTOTUNE).shuffle(BUFFER_SIZE).batch(BATCH_SIZE, drop_remainder=True).repeat()
test_vangogh = test_vangogh.map(preprocess, num_parallel_calls=AUTOTUNE).shuffle(BUFFER_SIZE).batch(BATCH_SIZE, drop_remainder=True).repeat()
test_photo = test_photo.map(preprocess, num_parallel_calls=AUTOTUNE).shuffle(BUFFER_SIZE).batch(BATCH_SIZE, drop_remainder=True).repeat()
模型构建
由于在 CycleGAN 中使用了使用了实例规范化,而 Tensorflow 并未提供实例规范化,因此可以自定义实现此层:
class InstanceNormalization(tf.keras.layers.Layer):
def __init__(self, epsilon=1e-5):
super(InstanceNormalization, self).__init__()
self.epsilon = epsilon
def build(self, input_shape):
self.scale = self.add_weight(
name='scale',
shape=input_shape[-1:],
initializer=tf.random_normal_initializer(1., 0.02),
trainable=True)
self.offset = self.add_weight(
name='offset',
shape=input_shape[-1:],
initializer='zeros',
trainable=True)
def call(self, x):
mean, variance = tf.nn.moments(x, axes=[1, 2], keepdims=True)
inv = tf.math.rsqrt(variance + self.epsilon)
normalized = (x - mean) * inv
return self.scale * normalized + self.offset
构建自定义上采样和下采样块,用于简化CycleGAN模型的构建:
def downsample(filters, size, norm_type='batchnorm', apply_norm=True):
"""Downsamples an input.
Conv2D => Batchnorm => LeakyRelu
Args:
filters: number of filters
size: filter size
norm_type: Normalization type; either 'batchnorm' or 'instancenorm'.
apply_norm: If True, adds the batchnorm layer
Returns:
Downsample Sequential Model
"""
initializer = tf.random_normal_initializer(0., 0.02)
result = tf.keras.Sequential()
result.add(
tf.keras.layers.Conv2D(filters, size, strides=2, padding='same',
kernel_initializer=initializer, use_bias=False))
if apply_norm:
if norm_type.lower() == 'batchnorm':
result.add(tf.keras.layers.BatchNormalization())
elif norm_type.lower() == 'instancenorm':
result.add(InstanceNormalization())
result.add(tf.keras.layers.LeakyReLU())
return result
def upsample(filters, size, norm_type='batchnorm', apply_dropout=False):
"""Upsamples an input.
Conv2DTranspose => Batchnorm => Dropout => Relu
Args:
filters: number of filters
size: filter size
norm_type: Normalization type; either 'batchnorm' or 'instancenorm'.
apply_dropout: If True, adds the dropout layer
Returns:
Upsample Sequential Model
"""
initializer = tf.random_normal_initializer(0., 0.02)
result = tf.keras.Sequential()
result.add(
tf.keras.layers.Conv2DTranspose(filters, size, strides=2,
padding='same',
kernel_initializer=initializer,
use_bias=False))
if norm_type.lower() == 'batchnorm':
result.add(tf.keras.layers.BatchNormalization())
elif norm_type.lower() == 'instancenorm':
result.add(InstanceNormalization())
if apply_dropout:
result.add(tf.keras.layers.Dropout(0.5))
result.add(tf.keras.layers.ReLU())
return result
接下来构建生成器和鉴别器,其中生成器基于 U-Net :
def unet_generator(output_channels, norm_type='batchnorm'):
"""
Args:
output_channels: Output channels
norm_type: Type of normalization. Either 'batchnorm' or 'instancenorm'.
Returns:
Generator model
"""
down_stack = [
downsample(64, 4, norm_type, apply_norm=False), # (bs, 128, 128, 64)
downsample(128, 4, norm_type), # (bs, 64, 64, 128)
downsample(256, 4, norm_type), # (bs, 32, 32, 256)
downsample(512, 4, norm_type), # (bs, 16, 16, 512)
downsample(512, 4, norm_type), # (bs, 8, 8, 512)
downsample(512, 4, norm_type), # (bs, 4, 4, 512)
downsample(512, 4, norm_type), # (bs, 2, 2, 512)
downsample(512, 4, norm_type), # (bs, 1, 1, 512)
]
up_stack = [
upsample(512, 4, norm_type, apply_dropout=True), # (bs, 2, 2, 1024)
upsample(512, 4, norm_type, apply_dropout=True), # (bs, 4, 4, 1024)
upsample(512, 4, norm_type, apply_dropout=True), # (bs, 8, 8, 1024)
upsample(512, 4, norm_type), # (bs, 16, 16, 1024)
upsample(256, 4, norm_type), # (bs, 32, 32, 512)
upsample(128, 4, norm_type), # (bs, 64, 64, 256)
upsample(64, 4, norm_type), # (bs, 128, 128, 128)
]
initializer = tf.random_normal_initializer(0., 0.02)
last = tf.keras.layers.Conv2DTranspose(
output_channels, 4, strides=2,
padding='same', kernel_initializer=initializer,
activation='tanh') # (bs, 256, 256, 3)
concat = tf.keras.layers.Concatenate()
inputs = tf.keras.layers.Input(shape=[None, None, 3])
x = inputs
# Downsampling through the model
skips = []
for down in down_stack:
x = down(x)
skips.append(x)
skips = reversed(skips[:-1])
# Upsampling and establishing the skip connections
for up, skip in zip(up_stack, skips):
x = up(x)
x = concat([x, skip])
x = last(x)
return tf.keras.Model(inputs=inputs, outputs=x)
def discriminator(norm_type='batchnorm', target=True):
"""
Args:
norm_type: Type of normalization. Either 'batchnorm' or 'instancenorm'.
target: Bool, indicating whether target image is an input or not.
Returns:
Discriminator model
"""
initializer = tf.random_normal_initializer(0., 0.02)
inp = tf.keras.layers.Input(shape=[None, None, 3], name='input_image')
x = inp
if target:
tar = tf.keras.layers.Input(shape=[None, None, 3], name='target_image')
x = tf.keras.layers.concatenate([inp, tar]) # (bs, 256, 256, channels*2)
down1 = downsample(64, 4, norm_type, False)(x) # (bs, 128, 128, 64)
down2 = downsample(128, 4, norm_type)(down1) # (bs, 64, 64, 128)
down3 = downsample(256, 4, norm_type)(down2) # (bs, 32, 32, 256)
zero_pad1 = tf.keras.layers.ZeroPadding2D()(down3) # (bs, 34, 34, 256)
conv = tf.keras.layers.Conv2D(
512, 4, strides=1, kernel_initializer=initializer,
use_bias=False)(zero_pad1) # (bs, 31, 31, 512)
if norm_type.lower() == 'batchnorm':
norm1 = tf.keras.layers.BatchNormalization()(conv)
elif norm_type.lower() == 'instancenorm':
norm1 = InstanceNormalization()(conv)
leaky_relu = tf.keras.layers.LeakyReLU()(norm1)
zero_pad2 = tf.keras.layers.ZeroPadding2D()(leaky_relu) # (bs, 33, 33, 512)
last = tf.keras.layers.Conv2D(
1, 4, strides=1,
kernel_initializer=initializer)(zero_pad2) # (bs, 30, 30, 1)
if target:
return tf.keras.Model(inputs=[inp, tar], outputs=last)
else:
return tf.keras.Model(inputs=inp, outputs=last)
损失函数
LAMBDA = 10
loss_obj = tf.keras.losses.BinaryCrossentropy(from_logits=True)
def discriminator_loss(real, generated):
real_loss = loss_obj(tf.ones_like(real), real)
generated_loss = loss_obj(tf.zeros_like(generated), generated)
total_disc_loss = real_loss + generated_loss
return total_disc_loss * 0.5
def generator_loss(generated):
return loss_obj(tf.ones_like(generated), generated)
def calc_cycle_loss(real_image, cycled_image):
loss1 = tf.reduce_mean(tf.abs(real_image - cycled_image))
return LAMBDA * loss1
def identity_loss(real_image, same_image):
loss = tf.reduce_mean(tf.abs(real_image - same_image))
return LAMBDA * 0.5 * loss
训练结果可视化函数
def generate_images(model, test_input):
prediction = model(test_input)
plt.figure(figsize=(12, 12))
display_list = [test_input[0], prediction[0]]
title = ['Input Image', 'Predicted Image']
for i in range(2):
plt.subplot(1, 2, i+1)
plt.title(title[i])
# getting the pixel values between [0, 1] to plot it.
plt.imshow(display_list[i] * 0.5 + 0.5)
plt.axis('off')
# plt.show()
plt.savefig('results/{}.png'.format(time.time()))
训练步骤
首先实例化模型:
generator_g = unet_generator(OUTPUT_CHANNELS, norm_type='instancenorm')
generator_f = unet_generator(OUTPUT_CHANNELS, norm_type='instancenorm')
discriminator_x = discriminator(norm_type='instancenorm', target=False)
discriminator_y = discriminator(norm_type='instancenorm', target=False)
实例化优化器:
generator_g_optimizer = tf.keras.optimizers.Adam(2e-4, beta_1=0.5)
generator_f_optimizer = tf.keras.optimizers.Adam(2e-4, beta_1=0.5)
discriminator_x_optimizer = tf.keras.optimizers.Adam(2e-4, beta_1=0.5)
discriminator_y_optimizer = tf.keras.optimizers.Adam(2e-4, beta_1=0.5)
checkpoint_path = "./checkpoints/vangogh2photo_train"
使用 tf.GradientTape 自定义训练过程:
@tf.function
def train_step(real_x, real_y):
# persistent is set to True because the tape is used more than
# once to calculate the gradients.
with tf.GradientTape(persistent=True) as tape:
# Generator G translates X -> Y
# Generator F translates Y -> X.
fake_y = generator_g(real_x, training=True)
cycled_x = generator_f(fake_y, training=True)
fake_x = generator_f(real_y, training=True)
cycled_y = generator_g(fake_x, training=True)
# same_x and same_y are used for identity loss.
same_x = generator_f(real_x, training=True)
same_y = generator_g(real_y, training=True)
disc_real_x = discriminator_x(real_x, training=True)
disc_real_y = discriminator_y(real_y, training=True)
disc_fake_x = discriminator_x(fake_x, training=True)
disc_fake_y = discriminator_y(fake_y, training=True)
# calculate the loss
gen_g_loss = generator_loss(disc_fake_y)
gen_f_loss = generator_loss(disc_fake_x)
total_cycle_loss = calc_cycle_loss(real_x, cycled_x) + calc_cycle_loss(real_y, cycled_y)
# Total generator loss = adversarial loss + cycle loss
total_gen_g_loss = gen_g_loss + total_cycle_loss + identity_loss(real_y, same_y)
total_gen_f_loss = gen_f_loss + total_cycle_loss + identity_loss(real_x, same_x)
disc_x_loss = discriminator_loss(disc_real_x, disc_fake_x)
disc_y_loss = discriminator_loss(disc_real_y, disc_fake_y)
# Calculate the gradients for generator and discriminator
generator_g_gradients = tape.gradient(total_gen_g_loss,
generator_g.trainable_variables)
generator_f_gradients = tape.gradient(total_gen_f_loss,
generator_f.trainable_variables)
discriminator_x_gradients = tape.gradient(disc_x_loss,
discriminator_x.trainable_variables)
discriminator_y_gradients = tape.gradient(disc_y_loss,
discriminator_y.trainable_variables)
# Apply the gradients to the optimizer
generator_g_optimizer.apply_gradients(zip(generator_g_gradients,
generator_g.trainable_variables)以上是关于学会CycleGAN进行风格迁移,实现自定义滤镜的主要内容,如果未能解决你的问题,请参考以下文章