图像分类用通俗易懂代码的复现EfficientNetV2,入门的绝佳选择(pytorch)
Posted AI浩
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了图像分类用通俗易懂代码的复现EfficientNetV2,入门的绝佳选择(pytorch)相关的知识,希望对你有一定的参考价值。
目录
摘要
上周学习了EfficientNetV2的论文,并对其进行了翻译,如果对论文感兴趣的可以参考我的文章:https://blog.csdn.net/hhhhhhhhhhwwwwwwwwww/article/details/117399085。
在EfficientNets的第一个版本中存在三个缺点:
(1) 用非常大的图像尺寸训练很慢;而且输入较大的图像必须以较小的批大小训练这些模型,这大大减慢了训练速度,但是精度反而下降了。
(2) 在网络浅层中使用Depthwise convolutions速度会很慢。
(3) 每个阶段都按比例放大是次优的。
EfficientNetV2针对这三个方面的缺点做了改进:
1、针对图像的大小的问题,作者提出了自适应正则化的渐进式学习的方法,详见论文的4.2节
2、针对Depthwise convolutions在早期层中很慢的问题,作者提出了 Fused-MBConv 模块来代替部分的MBConv。
3、针对每个阶段都按比例放大是次优的问题,作者使用非均匀缩放策略来逐步添加 到后期阶段。
作者对EfficientNetV2做了三方面的总结
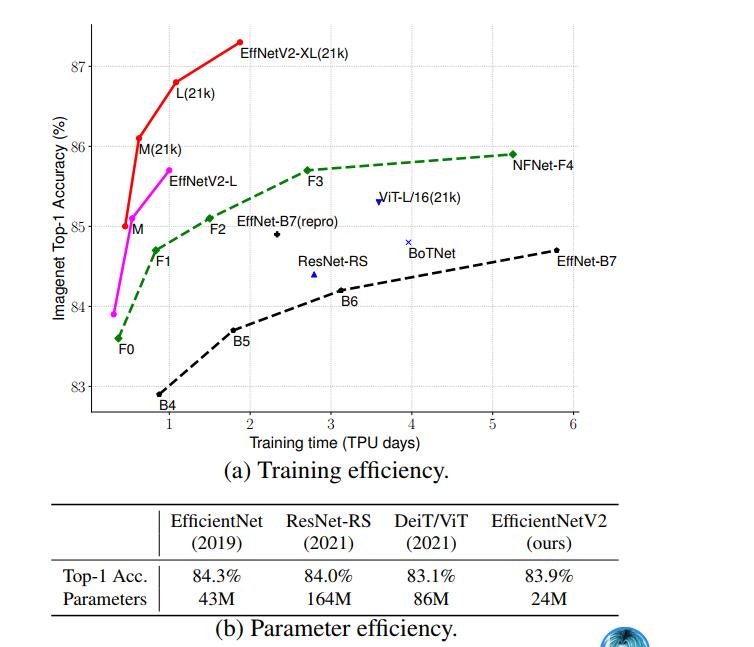
•我们引入了 EfficientNetV2,这是一个新的更小、更快的模型系列。 通过我们的训练感知NAS 和扩展发现,EfficientNetV2 在训练速度和参数效率方面都优于以前的模型。
• 我们提出了一种改进的渐进式学习方法,它可以根据图像大小自适应地调整正则化。 我们表明它可以加快训练速度,同时提高准确性。
• 我们在 ImageNet、CIFAR、Cars 和 Flowers 数据集上展示了比现有技术快 11 倍的训练速度和 6.8 倍的参数效率。
总之,一句话,我们的新模型又快又准而且还小,大家赶快用吧!下面我就讲讲如何使用Pytorch实现EfficientNetV2。
代码实现
EfficientNetV2和EfficientNet一样也是一个家族模型,包括:efficientnetv2_s、efficientnetv2_m,、efficientnetv2_l、efficientnetv2_xl。所以我们要实现四个模型。
激活函数
激活函数使用SiLU激活函数,我对激活函数做了总结,感兴趣的可以查看:CNN基础——激活函数_AI浩-CSDN博客
# SiLU (Swish) activation function
if hasattr(nn, 'SiLU'):
SiLU = nn.SiLU
else:
# For compatibility with old PyTorch versions
class SiLU(nn.Module):
def forward(self, x):
return x * torch.sigmoid(x)SE模块
SE模块,我在前面的文章中已经介绍了。现在直接将SE模块拿过来使用。
class SELayer(nn.Module):
def __init__(self, inp, oup, reduction=4):
super(SELayer, self).__init__()
self.avg_pool = nn.AdaptiveAvgPool2d(1)
self.fc = nn.Sequential(
nn.Linear(oup, _make_divisible(inp // reduction, 8)),
SiLU(),
nn.Linear(_make_divisible(inp // reduction, 8), oup),
nn.Sigmoid()
)
def forward(self, x):
b, c, _, _ = x.size()
y = self.avg_pool(x).view(b, c)
y = self.fc(y).view(b, c, 1, 1)
return x * y
定义MBConv模块和Fused-MBConv模块
这两个模块是整个模型实现的核心,模块的详细构造如下图:
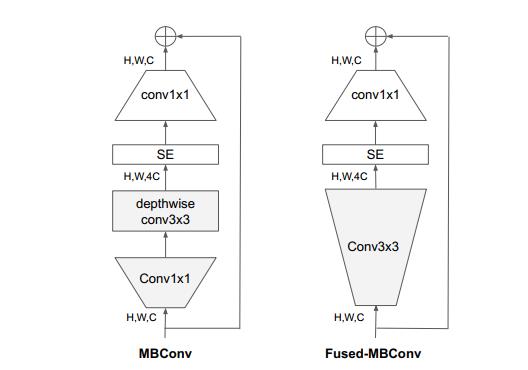
我们可以看到MBConv模块,经过1×1的卷积,然后channel放大四倍,再经过depthwise conv3×3的卷积,然后经过SE模块后,再经过1×1的卷积,把channel恢复到输入的大小,最后和上层的输入融合。
Fused-MBConv模块比MBConv模块简单些,先经过3×3的卷积,把channel放大四倍,然后经过SE模块,再经过1×1的卷积,最后和上层的输入融合。下面是实现MBConv模块和Fused-MBConv模块的详细代码:
class MBConv(nn.Module):
"""
定义MBConv模块和Fused-MBConv模块,将fused设置为1或True是Fused-MBConv,否则是MBConv
:param inp:输入的channel
:param oup:输出的channel
:param stride:步长,设置为1时图片的大小不变,设置为2时,图片的面积变为原来的四分之一
:param expand_ratio:放大的倍率
:return:
"""
def __init__(self, inp, oup, stride, expand_ratio, fused):
super(MBConv, self).__init__()
assert stride in [1, 2]
hidden_dim = round(inp * expand_ratio)
self.identity = stride == 1 and inp == oup
if fused:
self.conv = nn.Sequential(
# fused
nn.Conv2d(inp, hidden_dim, 3, stride, 1, bias=False),
nn.BatchNorm2d(hidden_dim),
SiLU(),
SELayer(inp, hidden_dim),
# pw-linear
nn.Conv2d(hidden_dim, oup, 1, 1, 0, bias=False),
nn.BatchNorm2d(oup),
)
else:
self.conv = nn.Sequential(
# pw
nn.Conv2d(inp, hidden_dim, 1, 1, 0, bias=False),
nn.BatchNorm2d(hidden_dim),
SiLU(),
# dw
nn.Conv2d(hidden_dim, hidden_dim, 3, stride, 1, groups=hidden_dim, bias=False),
nn.BatchNorm2d(hidden_dim),
SiLU(),
SELayer(inp, hidden_dim),
# pw-linear
nn.Conv2d(hidden_dim, oup, 1, 1, 0, bias=False),
nn.BatchNorm2d(oup),
)
def forward(self, x):
if self.identity:
return x + self.conv(x)
else:
return self.conv(x)
主体模块
class EfficientNetv2(nn.Module):
def __init__(self, cfgs, num_classes=1000, width_mult=1.):
super(EfficientNetv2, self).__init__()
self.cfgs = cfgs
# building first layer
input_channel = _make_divisible(24 * width_mult, 8)
layers = [conv_3x3_bn(3, input_channel, 2)]
# building inverted residual blocks
block = MBConv
for t, c, n, s, fused in self.cfgs:
output_channel = _make_divisible(c * width_mult, 8)
for i in range(n):
layers.append(block(input_channel, output_channel, s if i == 0 else 1, t, fused))
input_channel = output_channel
self.features = nn.Sequential(*layers)
# building last several layers
output_channel = _make_divisible(1792 * width_mult, 8) if width_mult > 1.0 else 1792
self.conv = conv_1x1_bn(input_channel, output_channel)
self.avgpool = nn.AdaptiveAvgPool2d((1, 1))
self.classifier = nn.Linear(output_channel, num_classes)
self._initialize_weights()
def forward(self, x):
x = self.features(x)
x = self.conv(x)
x = self.avgpool(x)
x = x.view(x.size(0), -1)
x = self.classifier(x)
return x
def _initialize_weights(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
n = m.kernel_size[0] * m.kernel_size[1] * m.out_channels
m.weight.data.normal_(0, math.sqrt(2. / n))
if m.bias is not None:
m.bias.data.zero_()
elif isinstance(m, nn.BatchNorm2d):
m.weight.data.fill_(1)
m.bias.data.zero_()
elif isinstance(m, nn.Linear):
m.weight.data.normal_(0, 0.001)
m.bias.data.zero_()理解这段代码,我们还需要了解输入参数cfgs,以efficientnetv2_s为例:
def efficientnetv2_s(**kwargs):
"""
Constructs a EfficientNetV2-S model
"""
cfgs = [
# t, c, n, s, fused
[1, 24, 2, 1, 1],
[4, 48, 4, 2, 1],
[4, 64, 4, 2, 1],
[4, 128, 6, 2, 0],
[6, 160, 9, 1, 0],
[6, 272, 15, 2, 0],
]
return EfficientNetv2(cfgs, **kwargs)第一列“t”指的是MBConv模块和Fused-MBConv模块第一个输入后放大的倍率。
第二列“c”,channel,指的是输出的channel。
第三列“n”,指定的是MBConv模块和Fused-MBConv模块堆叠的个数。
第四列“s”,指的是卷积的步长,步长为1,图片的大小不变,步长为图片的面积缩小为原来的四分之一,实现降维。
第五列“fused”,选择MBConv模块或Fused-MBConv模块,为1这是Fused-MBConv模块,0则是MBConv模块,对应了前面摘要提过了,在浅层用Fused-MBConv代替MBConv。
完整代码
import torch
import torch.nn as nn
import math
__all__ = ['efficientnetv2_s', 'efficientnetv2_m', 'efficientnetv2_l', 'efficientnetv2_xl']
from torchsummary import summary
#这个函数的目的是确保Channel能被8整除。
def _make_divisible(v, divisor, min_value=None):
"""
这个函数的目的是确保Channel能被8整除。
:param v:
:param divisor:
:param min_value:
:return:
"""
if min_value is None:
min_value = divisor
new_v = max(min_value, int(v + divisor / 2) // divisor * divisor)
# Make sure that round down does not go down by more than 10%.
if new_v < 0.9 * v:
new_v += divisor
return new_v
# SiLU (Swish) activation function
if hasattr(nn, 'SiLU'):
SiLU = nn.SiLU
else:
# For compatibility with old PyTorch versions
class SiLU(nn.Module):
def forward(self, x):
return x * torch.sigmoid(x)
class SELayer(nn.Module):
def __init__(self, inp, oup, reduction=4):
super(SELayer, self).__init__()
self.avg_pool = nn.AdaptiveAvgPool2d(1)
self.fc = nn.Sequential(
nn.Linear(oup, _make_divisible(inp // reduction, 8)),
SiLU(),
nn.Linear(_make_divisible(inp // reduction, 8), oup),
nn.Sigmoid()
)
def forward(self, x):
b, c, _, _ = x.size()
y = self.avg_pool(x).view(b, c)
y = self.fc(y).view(b, c, 1, 1)
return x * y
def conv_3x3_bn(inp, oup, stride):
return nn.Sequential(
nn.Conv2d(inp, oup, 3, stride, 1, bias=False),
nn.BatchNorm2d(oup),
SiLU()
)
def conv_1x1_bn(inp, oup):
return nn.Sequential(
nn.Conv2d(inp, oup, 1, 1, 0, bias=False),
nn.BatchNorm2d(oup),
SiLU()
)
class MBConv(nn.Module):
"""
定义MBConv模块和Fused-MBConv模块,将fused设置为1或True是Fused-MBConv,否则是MBConv
:param inp:输入的channel
:param oup:输出的channel
:param stride:步长,设置为1时图片的大小不变,设置为2时,图片的面积变为原来的四分之一
:param expand_ratio:放大的倍率
:return:
"""
def __init__(self, inp, oup, stride, expand_ratio, fused):
super(MBConv, self).__init__()
assert stride in [1, 2]
hidden_dim = round(inp * expand_ratio)
self.identity = stride == 1 and inp == oup
if fused:
self.conv = nn.Sequential(
# fused
nn.Conv2d(inp, hidden_dim, 3, stride, 1, bias=False),
nn.BatchNorm2d(hidden_dim),
SiLU(),
SELayer(inp, hidden_dim),
# pw-linear
nn.Conv2d(hidden_dim, oup, 1, 1, 0, bias=False),
nn.BatchNorm2d(oup),
)
else:
self.conv = nn.Sequential(
# pw
nn.Conv2d(inp, hidden_dim, 1, 1, 0, bias=False),
nn.BatchNorm2d(hidden_dim),
SiLU(),
# dw
nn.Conv2d(hidden_dim, hidden_dim, 3, stride, 1, groups=hidden_dim, bias=False),
nn.BatchNorm2d(hidden_dim),
SiLU(),
SELayer(inp, hidden_dim),
# pw-linear
nn.Conv2d(hidden_dim, oup, 1, 1, 0, bias=False),
nn.BatchNorm2d(oup),
)
def forward(self, x):
if self.identity:
return x + self.conv(x)
else:
return self.conv(x)
class EfficientNetv2(nn.Module):
def __init__(self, cfgs, num_classes=1000, width_mult=1.):
super(EfficientNetv2, self).__init__()
self.cfgs = cfgs
# building first layer
input_channel = _make_divisible(24 * width_mult, 8)
layers = [conv_3x3_bn(3, input_channel, 2)]
# building inverted residual blocks
block = MBConv
for t, c, n, s, fused in self.cfgs:
output_channel = _make_divisible(c * width_mult, 8)
for i in range(n):
layers.append(block(input_channel, output_channel, s if i == 0 else 1, t, fused))
input_channel = output_channel
self.features = nn.Sequential(*layers)
# building last several layers
output_channel = _make_divisible(1792 * width_mult, 8) if width_mult > 1.0 else 1792
self.conv = conv_1x1_bn(input_channel, output_channel)
self.avgpool = nn.AdaptiveAvgPool2d((1, 1))
self.classifier = nn.Linear(output_channel, num_classes)
self._initialize_weights()
def forward(self, x):
x = self.features(x)
x = self.conv(x)
x = self.avgpool(x)
x = x.view(x.size(0), -1)
x = self.classifier(x)
return x
def _initialize_weights(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
n = m.kernel_size[0] * m.kernel_size[1] * m.out_channels
m.weight.data.normal_(0, math.sqrt(2. / n))
if m.bias is not None:
m.bias.data.zero_()
elif isinstance(m, nn.BatchNorm2d):
m.weight.data.fill_(1)
m.bias.data.zero_()
elif isinstance(m, nn.Linear):
m.weight.data.normal_(0, 0.001)
m.bias.data.zero_()
def efficientnetv2_s(**kwargs):
"""
Constructs a EfficientNetV2-S model
"""
cfgs = [
# t, c, n, s, fused
[1, 24, 2, 1, 1],
[4, 48, 4, 2, 1],
[4, 64, 4, 2, 1],
[4, 128, 6, 2, 0],
[6, 160, 9, 1, 0],
[6, 272, 15, 2, 0],
]
return EfficientNetv2(cfgs, **kwargs)
def efficientnetv2_m(**kwargs):
"""
Constructs a EfficientNetV2-M model
"""
cfgs = [
# t, c, n, s, fused
[1, 24, 3, 1, 1],
[4, 48, 5, 2, 1],
[4, 80, 5, 2, 1],
[4, 160, 7, 2, 0],
[6, 176, 14, 1, 0],
[6, 304, 18, 2, 0],
[6, 512, 5, 1, 0],
]
return EfficientNetv2(cfgs, **kwargs)
def efficientnetv2_l(**kwargs):
"""
Constructs a EfficientNetV2-L model
"""
cfgs = [
# t, c, n, s, fused
[1, 32, 4, 1, 1],
[4, 64, 7, 2, 1],
[4, 96, 7, 2, 1],
[4, 192, 10, 2, 0],
[6, 224, 19, 1, 0],
[6, 384, 25, 2, 0],
[6, 640, 7, 1, 0],
]
return EfficientNetv2(cfgs, **kwargs)
def efficientnetv2_xl(**kwargs):
"""
Constructs a EfficientNetV2-XL model
"""
cfgs = [
# t, c, n, s, fused
[1, 32, 4, 1, 1],
[4, 64, 8, 2, 1],
[4, 96, 8, 2, 1],
[4, 192, 16, 2, 0],
[6, 256, 24, 1, 0],
[6, 512, 32, 2, 0],
[6, 640, 8, 1, 0],
]
return EfficientNetv2(cfgs, **kwargs)
if __name__ == '__main__':
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
model = efficientnetv2_s()
model.to(device)
summary(model, (3, 224, 224))
以上是关于图像分类用通俗易懂代码的复现EfficientNetV2,入门的绝佳选择(pytorch)的主要内容,如果未能解决你的问题,请参考以下文章