Ubuntu零基础教学-Ubuntu20.04安装Rosbridge并进行小乌龟测试 | 超级干货,建议收藏
Posted bug菌√
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Ubuntu零基础教学-Ubuntu20.04安装Rosbridge并进行小乌龟测试 | 超级干货,建议收藏相关的知识,希望对你有一定的参考价值。
系统要求:Ubuntu20.04
ROS安装版本: Noetic
一、Rosbridge介绍:
Robot Operating System (ROS) 是一个得到广泛应用机器人系统的软件框架,它包含了一系列的软件库和工具用于构建机器人应用。从驱动到最先进的算法,以及强大的开发者工具,ROS 包含了开发一个机器人项目所需要的所有东西。且它们都是开源的。
ROS 虽然名为机器人操作系统,但它与我们一般概念中的操作系统,如 Windows,Linux,ios 和 android 这些。Windows,Linux,iOS 和 Android 这些操作系统为我们管理计算机的物理硬件资源,如 CPU、内存、磁盘、网络及外设,提供如进程、线程和文件这样的抽象,并提供如读文件、写文件、创建进程、创建线程及启动线程这样的操作。ROS 所工作的层级并没有这么低,它基于一般概念中的操作系统来运行,官方推荐基于 Ubuntu Linux 运行,并在 Ubuntu Linux 操作系统提供的抽象和操作的基础之上,提供了更高层的抽象,如节点、服务、消息、主题等,以及更高层的操作,如主题的发布、主题的订阅、服务的查询与连接等操作。同时 ROS 还提供开发机器人项目所需的工具和功能库。
ROS 发行版是一个版本标识的 ROS 包集合,这些与 Linux 发行版(如 Ubuntu)类似。ROS 发行版的目的是让开发者可以基于一个相对稳定的代码库来工作,直到他们可以平稳地向前演进。一旦发行版发布,官方就会限制对其的改动,而仅仅提供对于核心包的 bug fixes 和非破坏性的增强。
当前(2018-01-28) ROS 系统已经发布了多个版本。ROS 最新的一些版本如下:
ROS 系统版本 时间发布 支持时间 ROS Lunar Loggerhead May 23rd, 2017 May, 2019 ROS Kinetic Kame May 23rd, 2016 LTS,April, 2021 (Xenial EOL) ROS Jade Turtle May 23rd, 2015 May, 2017 ROS Indigo Igloo July 22nd, 2014 LTS,April, 2019(Trusty EOL) ROS Hydro Medusa September 4th, 2013 May, 2015 ROS 基本上保持每年一个新版本,每两年一个长期发行版的发布节奏。关于 ROS 版本发布的更多内容,如更多的发行版的介绍,发布的计划等,可以参考 ROS 官方站点的 Distributions 主页。
目前官方推荐使用最近的一个长期支持版本,即 ROS Kinetic Kame,求新的同时兼顾稳定性无疑应该采用这一版本,如果想要尝试最新的功能特性则可以使用最新的发行版 ROS Lunar Loggerhead。


在此,针对小白系列教学,bug菌专门开放了一个Ubuntu零基础教学专栏,感兴趣的朋友可以关注《Ubuntu零基础教学》,bug菌做这么多只为一件事:就是想把你们都教会,教不会不收学费!若是文章对小伙伴们有所帮助,还请不忘给bug菌一个赞,你们的鼓励就是对bug菌最大的支持!
那么接下来,干正事啦!bug菌要开始上课了喔~


二、ROS 安装
步骤如下:
#1、添加 sources.list
为 Ubuntu 的包管理器增加源,设置计算机接受来自于 packages.ros.org 的软件。
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' 这一步会根据 Ubuntu Linux 发行版本的不同,添加不同的源。Ubuntu 的版本通过 lsb_release -sc 获得。一旦添加了正确的软件库,操作系统就知道去哪里下载程序,并根据命令自动安装软件。
#2、添加 keys
这一步是为了确认源代码是正确的,并且没有人在未经所有者授权的情况下,修改任何程序代码。通常情况下,当添加完软件库时,已经添加了软件库的密钥,并将其添加到操作系统的可信任列表中。
设置密钥的命令如下:
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654 ps:如果在连接密钥服务器时遇到了问题,可以尝试在上面的命令中用 hkp://pgp.mit.edu:80 或 hkp://keyserver.ubuntu.com:80 来替换。

#3、更新
首先,需要确保包管理器的索引已经更新至最新:
sudo apt update#4、ros安装
ROS 中有非常多不同的库和工具。官方提供了四种默认的配置来安装 ROS。也可以独立地安装 ROS 包。桌面完整安装(推荐采用):ROS,rqt, rviz,机器人通用库,2D/3D 仿真器,导航及 2D/3D 感知;
sudo apt install ros-noetic-desktop-full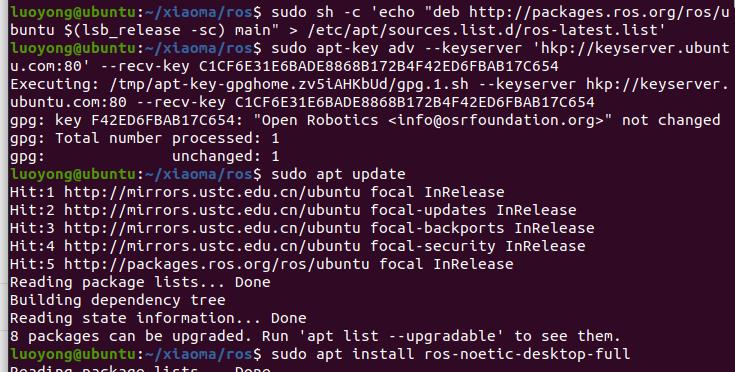
ps:以上执行中途若是报错,报错且如下:E: Unable to locate package ros-kinetic-desktop-full;可以参考我这篇《解决Ubuntu安装ros报错E: Unable to locate package ros-kinetic-desktop-full问题》;
#5、您必须在使用ROS的每个bash终端中获取此脚本的源代码。
source /opt/ros/noetic/setup.bash#6、环境配置
如果在每次一个新的终端启动时,ROS 环境变量都能自动地添加进你的 bash 会话是非常方便,这可以通过如下命令来实现:
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
#6.1、查看下环境配置
env | grep ROS

完成完整的 ROS 安装之后,可以对安装做一个简单的测试。可以通过 roscore 和 turtlesim 来做测试。
接下来进行小乌龟测试;
注意 turtlesim 的运行依赖于 roscore 的运行,因此在测试 turtlesim 需要同时运行 roscore。
7、小海龟测试
小海龟测试需要依次打开三个新的命令行窗口:
窗口1:打开新窗口快捷键:Ctrl + Alt +T
roscore
窗口2:此时会跳出一个TurtleSim 小乌龟的控制窗口
rosrun turtlesim turtlesim_node
窗口3:调用键盘控制。使用键盘方向键对小海龟进行控制。
切记,鼠标光标一定要聚焦在下方的3窗口中,方能通过键盘控制乌龟动起来哦。
rosrun turtlesim turtle_teleop_key

实操键盘方向键,如下演示:

综上,就是bug菌本期带来的干货啦,若是还不够吃,那bug菌再想想办法~~

三、热文推荐:
- 如何在Ubuntu20.04上安装jdk1.8及环境变量配置
- 如何在Ubuntu20.04上安装IDEA 及idea踩坑指南
- 如何在Ubuntu20.04上安装maven 及环境变量配置
- 如何在Ubuntu20.04上设置中文界面及配置中文输入法
- 如何解决Ubuntu20.04硬件时间与系统时间竟然不一致
- 如何在Ubuntu上安装Redis介绍及安装 | 超级详细,建议收藏
... ...
若是想要了解更多Ubuntu相关文章,请关注bug菌的专栏《Ubuntu零基础教学》,bug菌会持续更新哒;手把手教你如何吃透Ubuntu!我用双手成就你的梦想。
如果觉得这篇文章对你有所帮助,还请不忘在文章的左下角,直接pia的一下点亮它 up up up!!!若是我,不用犹豫直接进我的收藏夹吃灰去吧!不管以后用不用的上,先吃上灰再说,哈哈哈哈哈嗝~~

❤如果文章对您有所帮助,就请在文章末尾的左下角把大拇指点亮吧!(#^.^#);
❤如果喜欢bug菌分享的文章,就请给bug菌点个关注吧!(๑′ᴗ‵๑)づ╭❤~;
❤对文章有任何问题欢迎小伙伴们下方留言或者入群探讨【群号:708072830】;
❤鉴于个人经验有限,所有观点及技术研点,如有异议,请直接回复参与讨论(请勿发表攻击言论,谢谢);
❤版权声明:本文为博主原创文章,转载请附上原文出处链接和本文声明,版权所有,盗版必究!(*^▽^*).
以上是关于Ubuntu零基础教学-Ubuntu20.04安装Rosbridge并进行小乌龟测试 | 超级干货,建议收藏的主要内容,如果未能解决你的问题,请参考以下文章