PaddleOCR C++学习笔记
Posted OpenCV or Android
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了PaddleOCR C++学习笔记相关的知识,希望对你有一定的参考价值。
学更好的别人,
做更好的自己。
——《微卡智享》
前言

上篇提的优化方向
替换通用的OCR识别模型
分割华容道图片,单张识别
替换通用的OCR模型
01
下载通用OCR模型

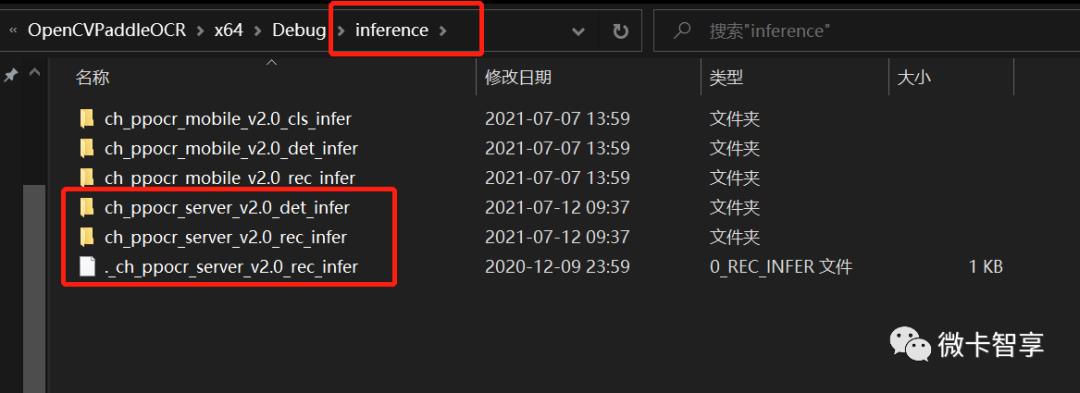
02
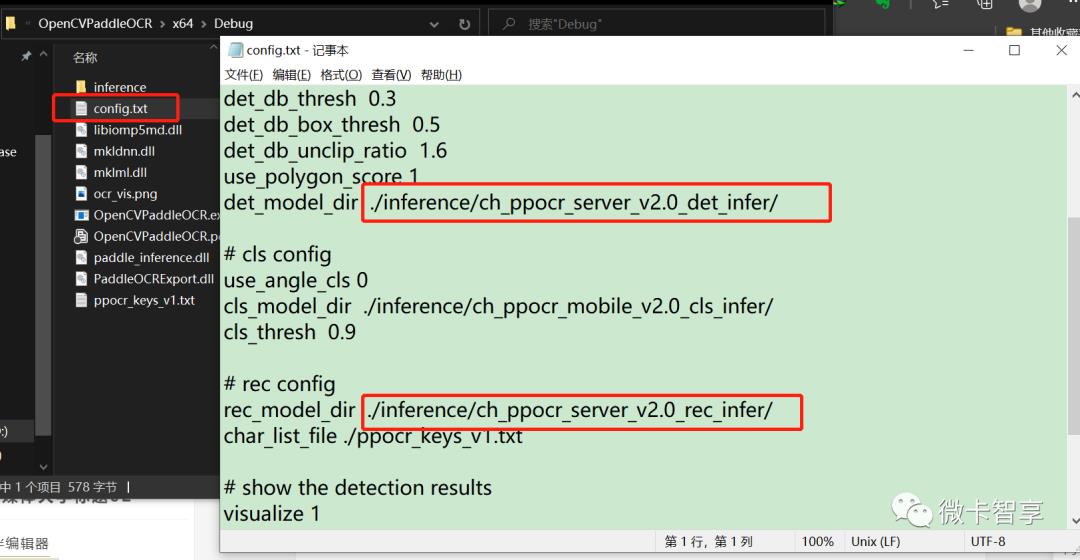
修改Config.txt配置文件
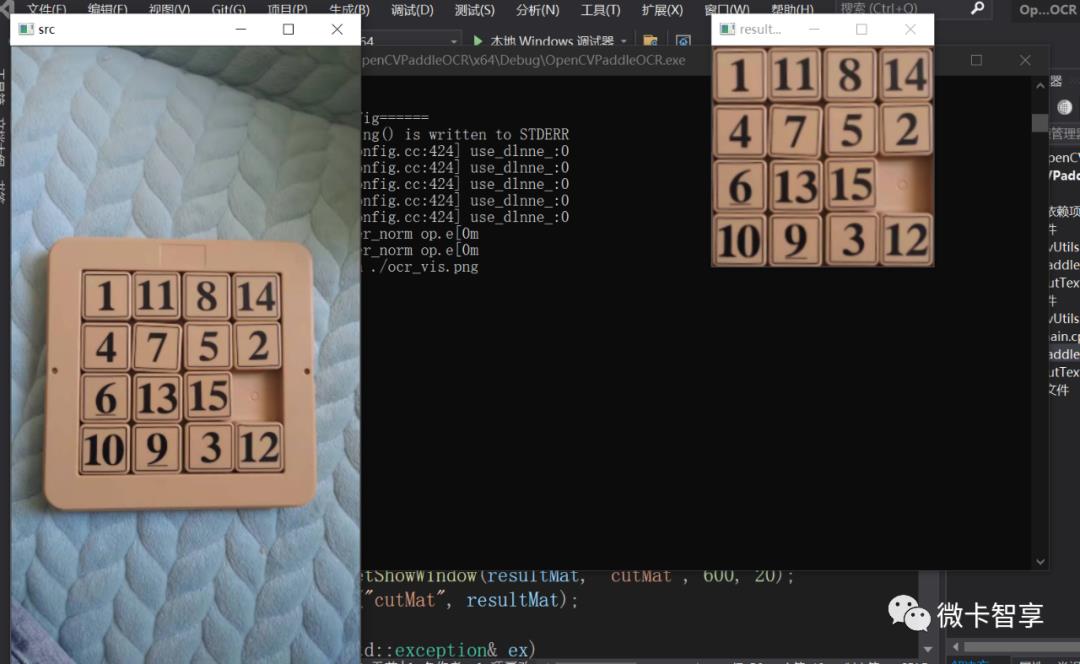
对比效果

通用OCR模型
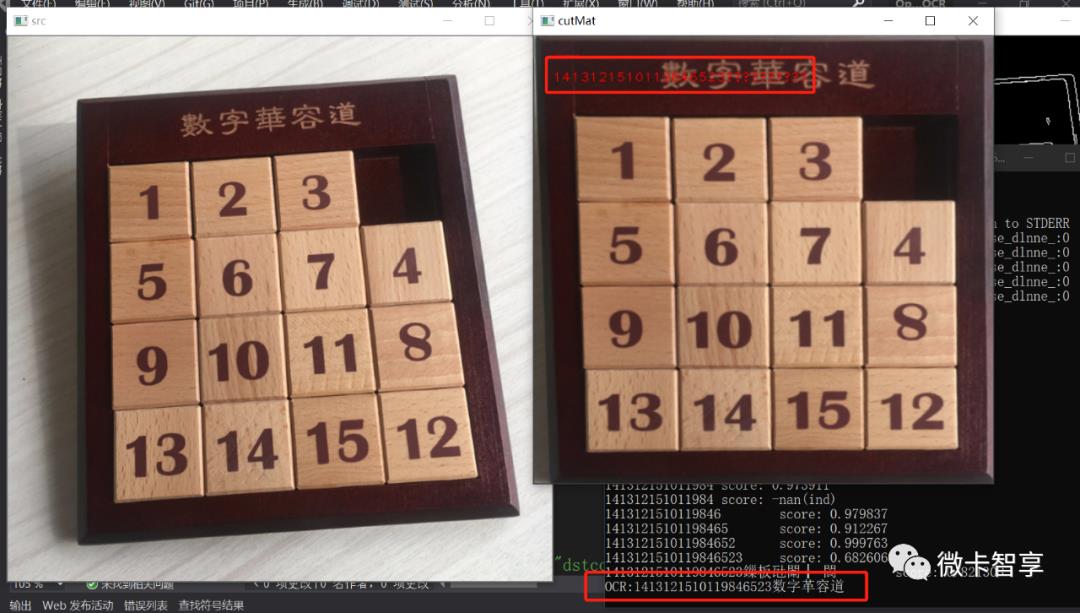
替换了确实识别率比原来的模型好的,从上图中可以看到,原来数字华容道识别为数字革容道,而通用模型识别就完全没有问题。
问题一解决。

分割数字华容道棋盘
-
用拉普拉斯算子提高图像对比度 -
二值化图像后进行距离变换 -
对距离变换后的再进行归一化 -
查找轮廓并实现分水岭分割
用上面的方法输出的效果也并不是想要的,所以这个也放弃了。
上面的两个效果不好,然后就想已经通过透视变换将图像矫正过来了,所以用直线检测后计算点来定位矩形再分割。使用中霍夫直接的函数调参花了不少时间,效果也不好,并且后续的处理应该也很麻烦,所以暂时也放弃了。
上面三个方法是在图像中查找16个矩形再分割,处理的效果都不理想,所以就考虑透视变换的图像中再做处理,在原来的透视变换中再做迭代的处理,再查找一次里面的最大正方形截取出来,这样直接进行等比分割就简单多了,于是就把原来main.cpp里面预处理透视变换的代码封装了函数,用递归的方式实现自定义迭代次数。
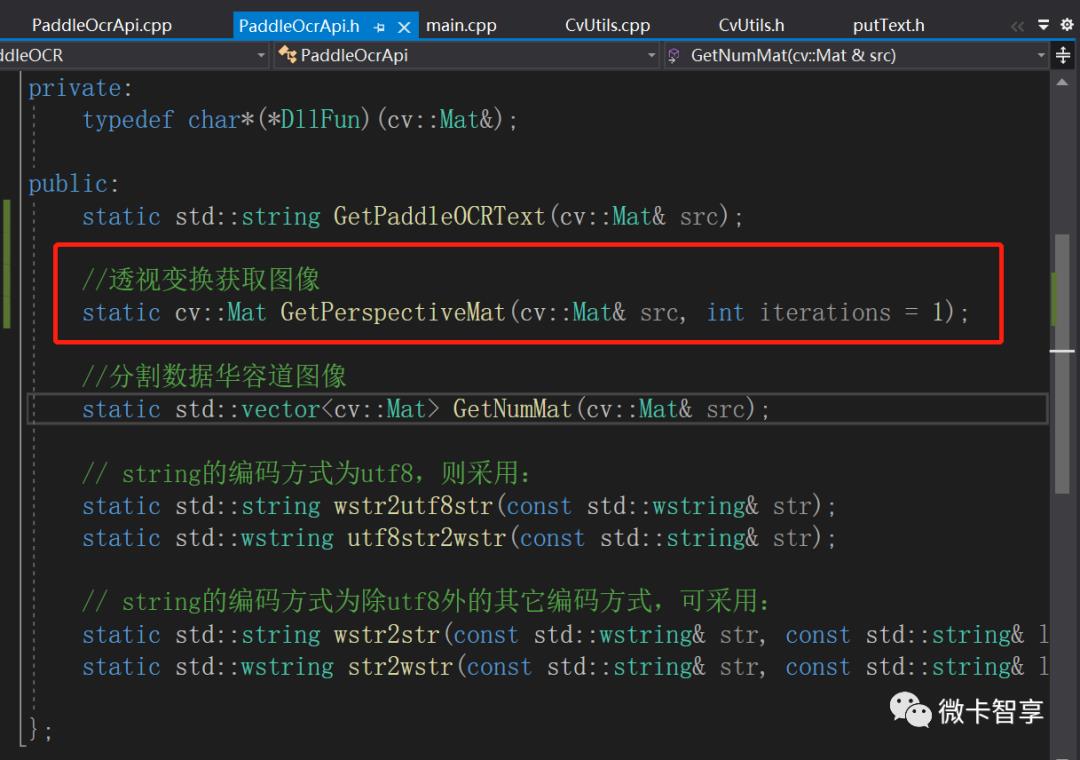
cv::Mat PaddleOcrApi::GetPerspectiveMat(cv::Mat& src, int iterations){cv::Mat tmpsrc, cannysrc, resultMat;src.copyTo(tmpsrc);//高斯滤波cv::GaussianBlur(tmpsrc, tmpsrc, cv::Size(5, 5), 0.5, 0.5);int srcArea = tmpsrc.size().area();float maxArea = 0;int maxAreaidx = -1;std::vector<cv::Mat> channels;cv::Mat B_src, G_src, R_src, dstmat;cv::split(tmpsrc, channels);int minthreshold = 120, maxthreshold = 200;//B进行Canny//大津法求阈值CvUtils::GetMatMinMaxThreshold(channels[0], minthreshold, maxthreshold, 1);std::cout << "OTSUmin:" << minthreshold << " OTSUmax:" << maxthreshold << std::endl;//Canny边缘提取cv::Canny(channels[0], B_src, minthreshold, maxthreshold);//大津法求阈值CvUtils::GetMatMinMaxThreshold(channels[1], minthreshold, maxthreshold, 1);std::cout << "OTSUmin:" << minthreshold << " OTSUmax:" << maxthreshold << std::endl;//Canny边缘提取Canny(channels[1], G_src, minthreshold, maxthreshold);//大津法求阈值CvUtils::GetMatMinMaxThreshold(channels[2], minthreshold, maxthreshold, 1);std::cout << "OTSUmin:" << minthreshold << " OTSUmax:" << maxthreshold << std::endl;//Canny边缘提取Canny(channels[2], R_src, minthreshold, maxthreshold);bitwise_or(B_src, G_src, dstmat);bitwise_or(R_src, dstmat, dstmat);//CvUtils::SetShowWindow(dstmat, "dstmat", 700, 20);//imshow("dstmat", dstmat);std::vector<std::vector<cv::Point>> contours;std::vector<cv::Vec4i> hierarchy;findContours(dstmat, contours, hierarchy, cv::RETR_TREE, cv::CHAIN_APPROX_SIMPLE);cv::Mat dstcontour = cv::Mat::zeros(cannysrc.size(), CV_8SC3);cv::Mat tmpcontour;dstcontour.copyTo(tmpcontour);//定义拟合后的多边形数组std::vector<std::vector<cv::Point>> vtshulls(contours.size());for (int i = 0; i < contours.size(); ++i) {//判断轮廓形状,不是四边形的忽略掉double lensval = 0.01 * arcLength(contours[i], true);std::vector<cv::Point> convexhull;approxPolyDP(cv::Mat(contours[i]), convexhull, lensval, true);//拟合的多边形存放到定义的数组中vtshulls[i] = convexhull;//不是四边形的过滤掉if (convexhull.size() != 4) continue;//求出最小旋转矩形cv::RotatedRect rRect = minAreaRect(contours[i]);//更新最小旋转矩形中面积最大的值if (rRect.size.height == 0) continue;if (rRect.size.area() > maxArea && rRect.size.area() > srcArea * 0.1&& !CvUtils::CheckRectBorder(src, rRect)) {maxArea = rRect.size.area();maxAreaidx = i;}}//找到符合条码的最大面积的轮廓进行处理if (maxAreaidx >= 0) {std::cout << "iterations:" << iterations << " maxAreaidx:" << maxAreaidx << std::endl;//获取最小旋转矩形cv::RotatedRect rRect = minAreaRect(contours[maxAreaidx]);cv::Point2f vertices[4];//重新排序矩形坐标点,按左上,右上,右下,左下顺序CvUtils::SortRotatedRectPoints(vertices, rRect);std::cout << "Rect:" << vertices[0] << vertices[1] << vertices[2] << vertices[3] << std::endl;//根据获得的4个点画线for (int k = 0; k < 4; ++k) {line(dstcontour, vertices[k], vertices[(k + 1) % 4], cv::Scalar(255, 0, 0));}//计算四边形的四点坐标cv::Point2f rPoints[4];CvUtils::GetPointsFromRect(rPoints, vertices, vtshulls[maxAreaidx]);for (int k = 0; k < 4; ++k) {line(dstcontour, rPoints[k], rPoints[(k + 1) % 4], cv::Scalar(255, 255, 255));}//采用离最小矩形四个点最近的重新设置范围,将所在区域的点做直线拟合再看看结果cv::Point2f newPoints[4];CvUtils::GetPointsFromFitline(newPoints, rPoints, vertices);for (int k = 0; k < 4; ++k) {line(dstcontour, newPoints[k], newPoints[(k + 1) % 4], cv::Scalar(255, 100, 255));}//根据最小矩形和多边形拟合的最大四个点计算透视变换矩阵cv::Point2f rectPoint[4];//计算旋转矩形的宽和高float rWidth = CvUtils::CalcPointDistance(vertices[0], vertices[1]);float rHeight = CvUtils::CalcPointDistance(vertices[1], vertices[2]);//计算透视变换的左上角起始点float left = dstcontour.cols;float top = dstcontour.rows;for (int i = 0; i < 4; ++i) {if (left > newPoints[i].x) left = newPoints[i].x;if (top > newPoints[i].y) top = newPoints[i].y;}rectPoint[0] = cv::Point2f(left, top);rectPoint[1] = rectPoint[0] + cv::Point2f(rWidth, 0);rectPoint[2] = rectPoint[1] + cv::Point2f(0, rHeight);rectPoint[3] = rectPoint[0] + cv::Point2f(0, rHeight);//计算透视变换矩阵cv::Mat warpmatrix = getPerspectiveTransform(rPoints, rectPoint);cv::Mat resultimg;//透视变换warpPerspective(src, resultimg, warpmatrix, resultimg.size(), cv::INTER_LINEAR);/*CvUtils::SetShowWindow(resultimg, "resultimg", 200, 20);imshow("resultimg", resultimg);*///载取透视变换后的图像显示出来cv::Rect cutrect = cv::Rect(rectPoint[0], rectPoint[2]);resultMat = resultimg(cutrect);//CvUtils::SetShowWindow(resultMat, "resultMat", 600, 20);//cv::imshow("resultMat", resultMat);iterations--;if (iterations > 0) {resultMat = GetPerspectiveMat(resultMat, iterations);}}else {src.copyTo(resultMat);}return resultMat;}
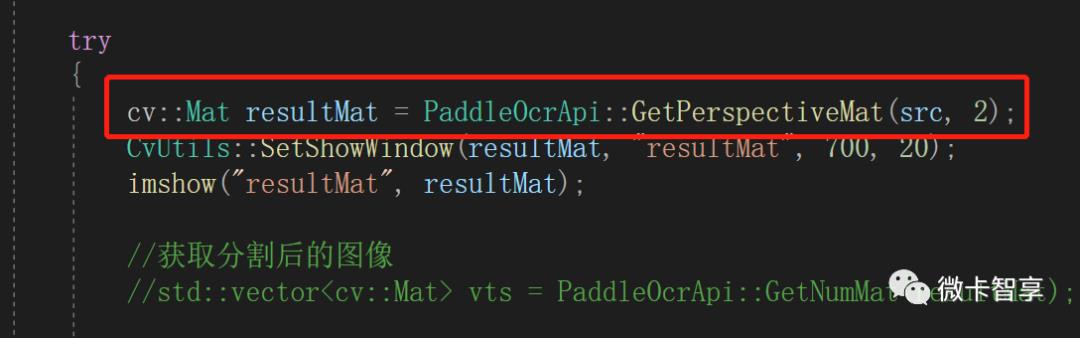
调用时把参数改为2,做两次透视变换。
对比效果
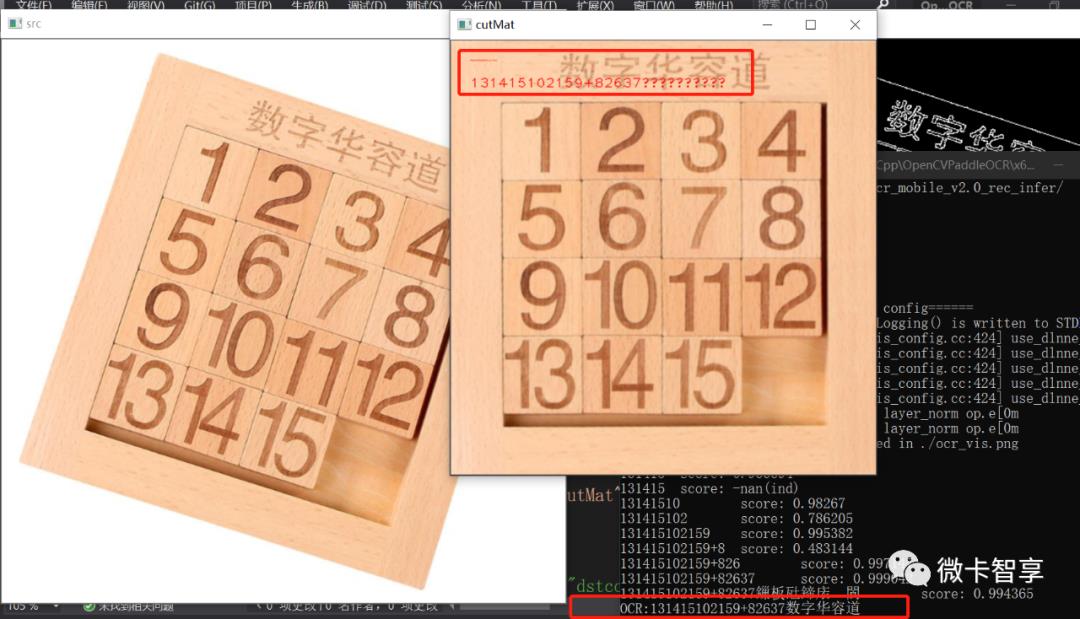

这张效果是一样的


这样检测的就有问题,显示不对
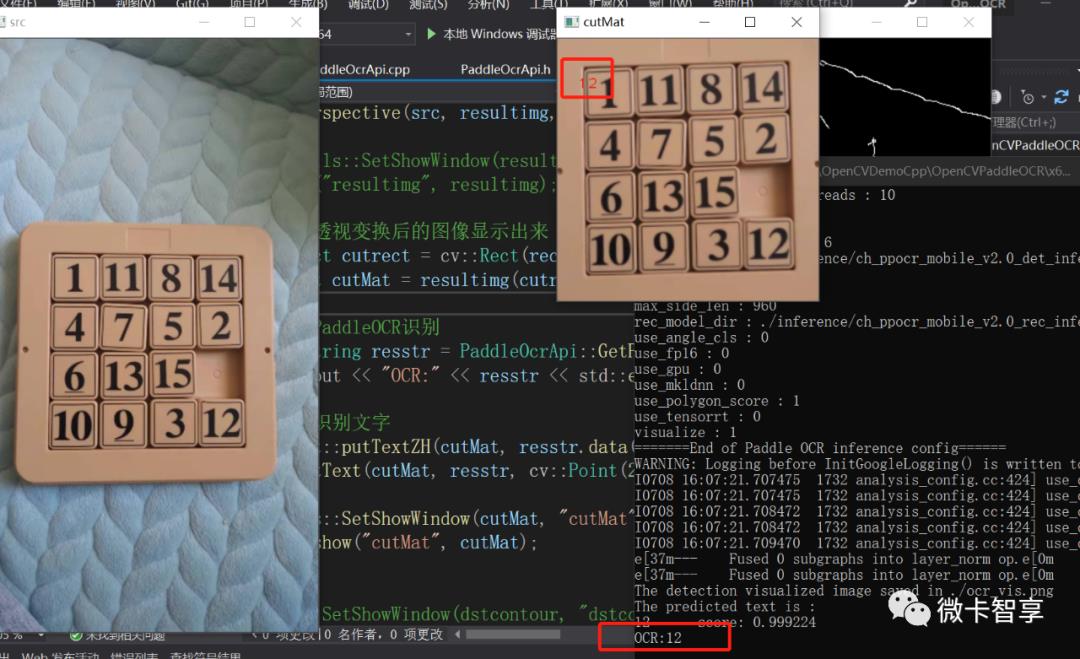
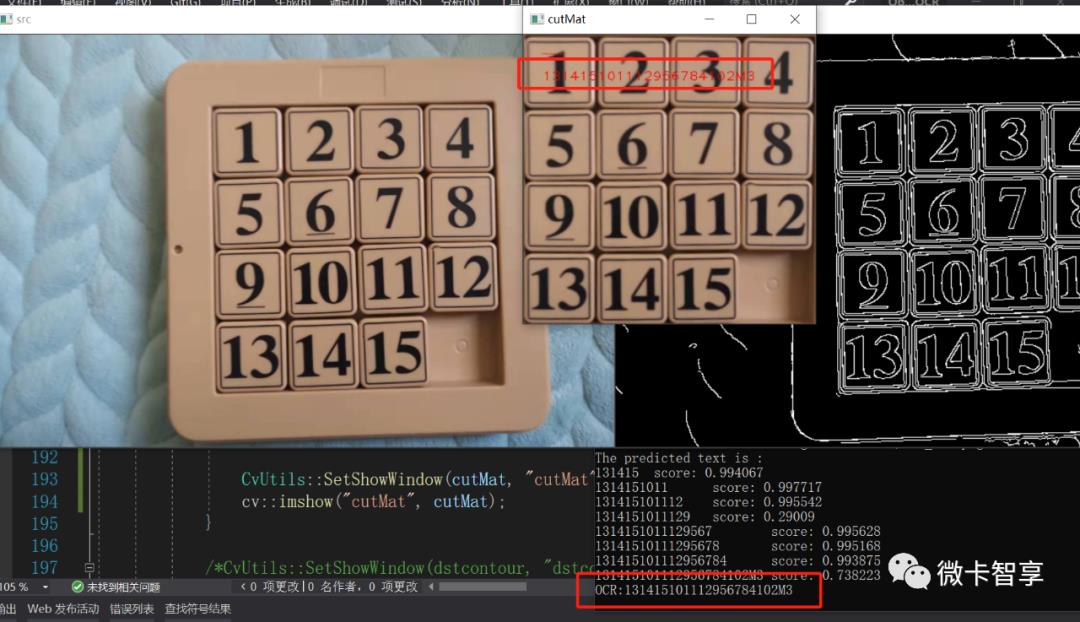
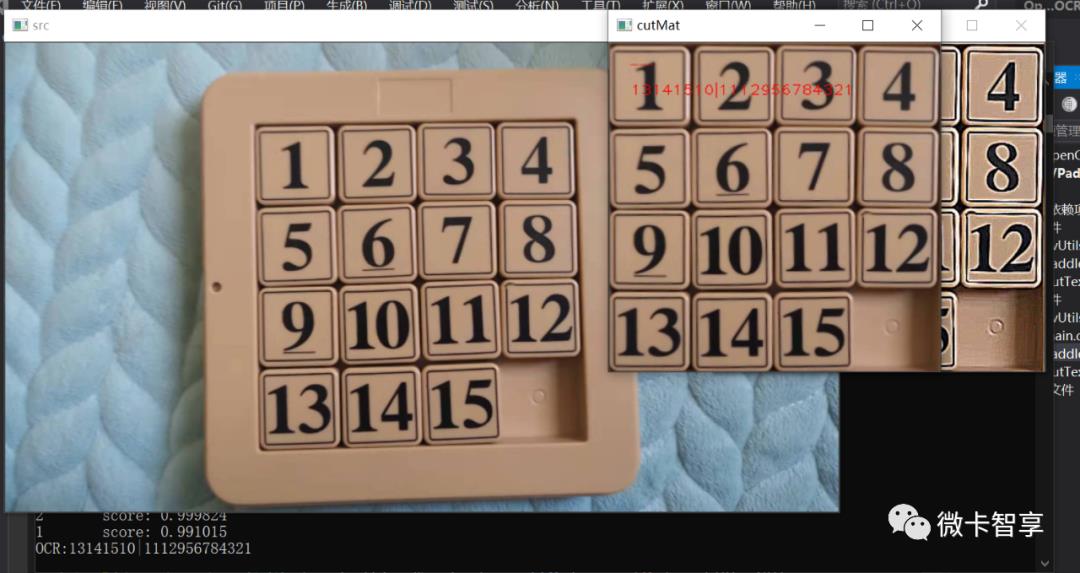
这张效果是一样的
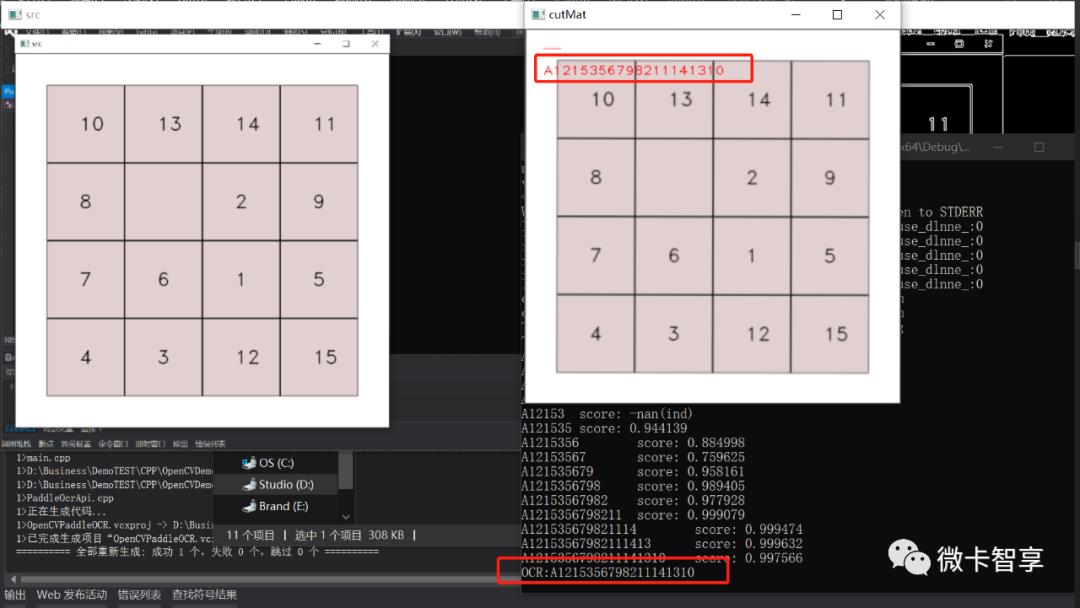
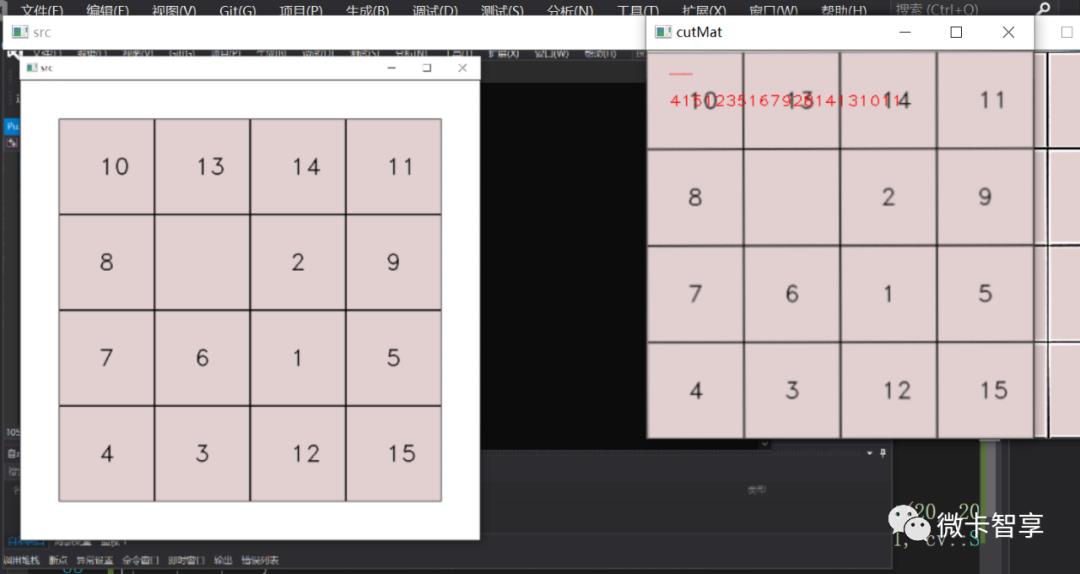

试了多次来说,处理的效果都和预期有差,所以最终考虑了下,还是修改PaddleOCR的源码应该比这个效果好,于是就继续研究PaddleOCR源码。
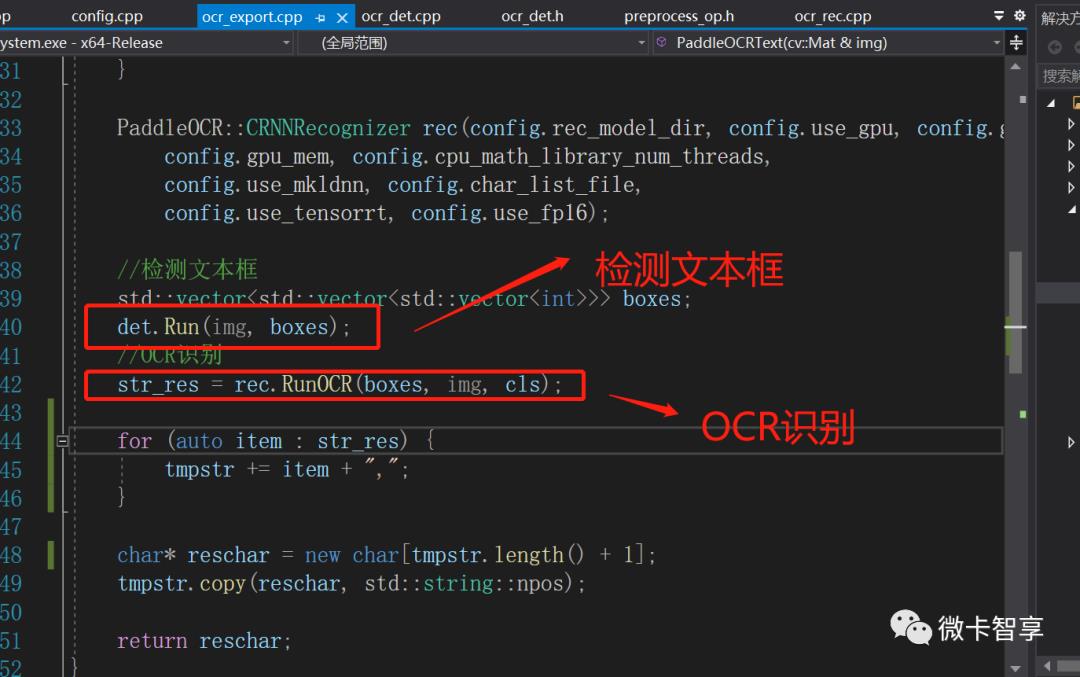
首先检测的文本框会存放到boxes的容器中
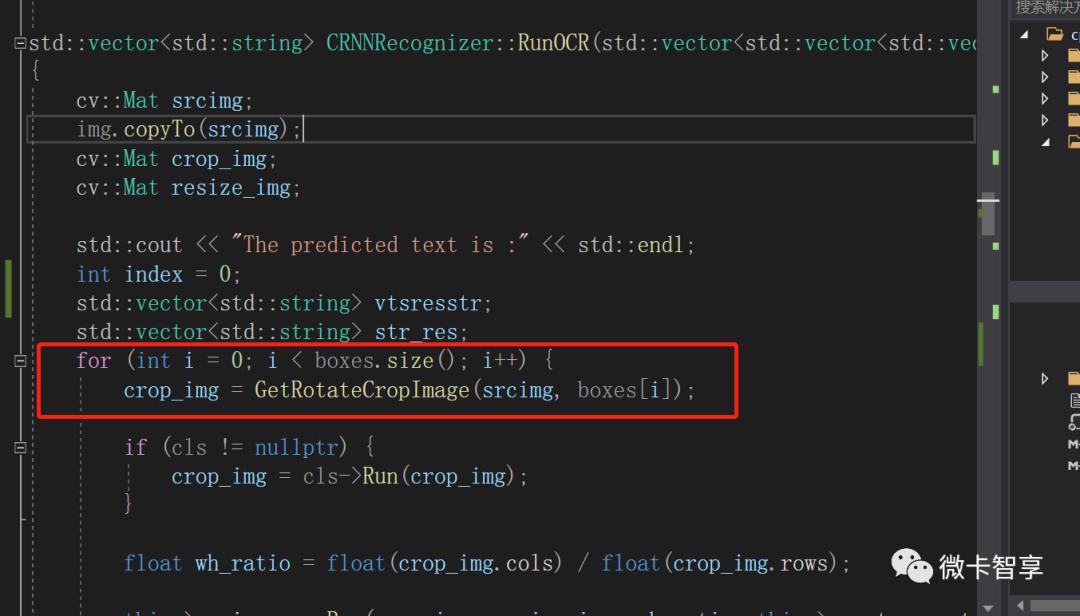
点开RunOCR的函数,遍历boxes的容器后会有个GetRotateCropImage的函数。
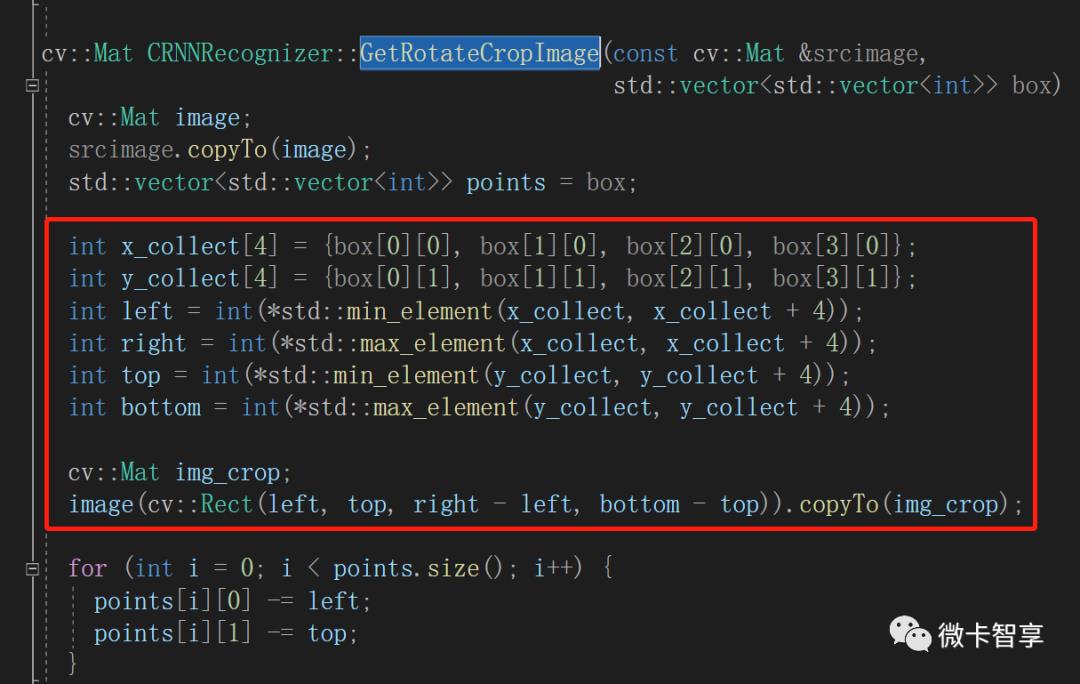
在GetRotateCropImage函数中会根据box的点生成截取的图像矩形,所以可以在这里考虑改造函数,将生成的Rect返回来,然后通过坐标和大小来定位及找到对应的识别文本。
源码地址
https://github.com/Vaccae/OpenCVDemoCpp.git
完

扫描二维码
获取更多精彩
微卡智享
以上是关于PaddleOCR C++学习笔记的主要内容,如果未能解决你的问题,请参考以下文章