OpenCV-理想高通&低通滤波器(C++)
Posted 翟大宝Steven
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了OpenCV-理想高通&低通滤波器(C++)相关的知识,希望对你有一定的参考价值。
场景需求
做图像处理,滤波是家常便饭,今天给大家分享最基本的理想滤波器实现。
众所周知,在频谱中,低频主要对应图像在平滑区域的总体灰度级分布,高频对应图像细节部分,如边缘和噪声。理想滤波器的原理就是利用截止频率D作为截断点,高通则小于截止频率的频谱成分变0,低通则大于截止频率的频谱成分变0,公式和具体原理就不再罗列了,百度一下全都有,接下来是硬货——C++&OpenCV代码实现。
相关功能函数的C++实现代码
// 理想低通滤波器
cv::Mat ideal_low_pass_filter(cv::Mat &src, float sigma)
{
cv::Mat padded = image_make_border(src);
cv::Mat ideal_kernel = ideal_low_kernel(padded, sigma);
cv::Mat result = frequency_filter(padded, ideal_kernel);
return result;
}
// 理想低通滤波核函数
cv::Mat ideal_low_kernel(cv::Mat &scr, float sigma)
{
cv::Mat ideal_low_pass(scr.size(), CV_32FC1); //,CV_32FC1
float d0 = sigma;//半径D0越小,模糊越大;半径D0越大,模糊越小
for (int i = 0; i < scr.rows; i++) {
for (int j = 0; j < scr.cols; j++) {
float d = sqrt(pow(float(i - scr.rows / 2), 2) + pow(float(j - scr.cols / 2), 2));//分子,计算pow必须为float型
if (d <= d0) {
ideal_low_pass.at<float>(i, j) = 1;
}
else {
ideal_low_pass.at<float>(i, j) = 0;
}
}
}
return ideal_low_pass;
}
// 理想高通滤波
cv::Mat ideal_high_pass_filter(cv::Mat &src, float sigma)
{
cv::Mat padded = image_make_border(src);
cv::Mat ideal_kernel = ideal_high_kernel(padded, sigma);
cv::Mat result = frequency_filter(padded, ideal_kernel);
return result;
}
// 理想高通滤波核函数
cv::Mat ideal_high_kernel(cv::Mat &scr, float sigma)
{
cv::Mat ideal_high_pass(scr.size(), CV_32FC1); //,CV_32FC1
float d0 = sigma;//半径D0越小,模糊越大;半径D0越大,模糊越小
for (int i = 0; i < scr.rows; i++) {
for (int j = 0; j < scr.cols; j++) {
float d = sqrt(pow(float(i - scr.rows / 2), 2) + pow(float(j - scr.cols / 2), 2));//分子,计算pow必须为float型
if (d <= d0) {
ideal_high_pass.at<float>(i, j) = 0;
}
else {
ideal_high_pass.at<float>(i, j) = 1;
}
}
}
return ideal_high_pass;
}
// 频率域滤波
cv::Mat frequency_filter(cv::Mat &scr, cv::Mat &blur)
{
cv::Mat mask = scr == scr;
scr.setTo(0.0f, ~mask);
//创建通道,存储dft后的实部与虚部(CV_32F,必须为单通道数)
cv::Mat plane[] = { scr.clone(), cv::Mat::zeros(scr.size() , CV_32FC1) };
cv::Mat complexIm;
cv::merge(plane, 2, complexIm); // 合并通道 (把两个矩阵合并为一个2通道的Mat类容器)
cv::dft(complexIm, complexIm); // 进行傅立叶变换,结果保存在自身
// 分离通道(数组分离)
cv::split(complexIm, plane);
// 以下的操作是频域迁移
fftshift(plane[0], plane[1]);
// *****************滤波器函数与DFT结果的乘积****************
cv::Mat blur_r, blur_i, BLUR;
cv::multiply(plane[0], blur, blur_r); // 滤波(实部与滤波器模板对应元素相乘)
cv::multiply(plane[1], blur, blur_i); // 滤波(虚部与滤波器模板对应元素相乘)
cv::Mat plane1[] = { blur_r, blur_i };
// 再次搬移回来进行逆变换
fftshift(plane1[0], plane1[1]);
cv::merge(plane1, 2, BLUR); // 实部与虚部合并
cv::idft(BLUR, BLUR); // idft结果也为复数
BLUR = BLUR / BLUR.rows / BLUR.cols;
cv::split(BLUR, plane);//分离通道,主要获取通道
return plane[0];
}
// 图像边界处理
cv::Mat image_make_border(cv::Mat &src)
{
int w = cv::getOptimalDFTSize(src.cols); // 获取DFT变换的最佳宽度
int h = cv::getOptimalDFTSize(src.rows); // 获取DFT变换的最佳高度
cv::Mat padded;
// 常量法扩充图像边界,常量 = 0
cv::copyMakeBorder(src, padded, 0, h - src.rows, 0, w - src.cols, cv::BORDER_CONSTANT, cv::Scalar::all(0));
padded.convertTo(padded, CV_32FC1);
return padded;
}
// fft变换后进行频谱搬移
void fftshift(cv::Mat &plane0, cv::Mat &plane1)
{
// 以下的操作是移动图像 (零频移到中心)
int cx = plane0.cols / 2;
int cy = plane0.rows / 2;
cv::Mat part1_r(plane0, cv::Rect(0, 0, cx, cy)); // 元素坐标表示为(cx, cy)
cv::Mat part2_r(plane0, cv::Rect(cx, 0, cx, cy));
cv::Mat part3_r(plane0, cv::Rect(0, cy, cx, cy));
cv::Mat part4_r(plane0, cv::Rect(cx, cy, cx, cy));
cv::Mat temp;
part1_r.copyTo(temp); //左上与右下交换位置(实部)
part4_r.copyTo(part1_r);
temp.copyTo(part4_r);
part2_r.copyTo(temp); //右上与左下交换位置(实部)
part3_r.copyTo(part2_r);
temp.copyTo(part3_r);
cv::Mat part1_i(plane1, cv::Rect(0, 0, cx, cy)); //元素坐标(cx,cy)
cv::Mat part2_i(plane1, cv::Rect(cx, 0, cx, cy));
cv::Mat part3_i(plane1, cv::Rect(0, cy, cx, cy));
cv::Mat part4_i(plane1, cv::Rect(cx, cy, cx, cy));
part1_i.copyTo(temp); //左上与右下交换位置(虚部)
part4_i.copyTo(part1_i);
temp.copyTo(part4_i);
part2_i.copyTo(temp); //右上与左下交换位置(虚部)
part3_i.copyTo(part2_i);
temp.copyTo(part3_i);
}测试代码
#include<iostream>
#include<opencv2/opencv.hpp>
#include<ctime>
using namespace std;
using namespace cv;
cv::Mat ideal_low_kernel(cv::Mat &scr, float sigma);
cv::Mat ideal_low_pass_filter(cv::Mat &src, float sigma);
cv::Mat ideal_high_kernel(cv::Mat &scr, float sigma);
cv::Mat ideal_high_pass_filter(cv::Mat &src, float sigma);
cv::Mat frequency_filter(cv::Mat &scr, cv::Mat &blur);
cv::Mat image_make_border(cv::Mat &src);
void fftshift(cv::Mat &plane0, cv::Mat &plane1);
int main(void)
{
Mat test = imread("tangsan.jpg", 0);
float D0 = 50.0f;
float D1 = 5.0f;
Mat lowpass = ideal_low_pass_filter(test, D0);
Mat highpass = ideal_high_pass_filter(test, D1);
imshow("original", test);
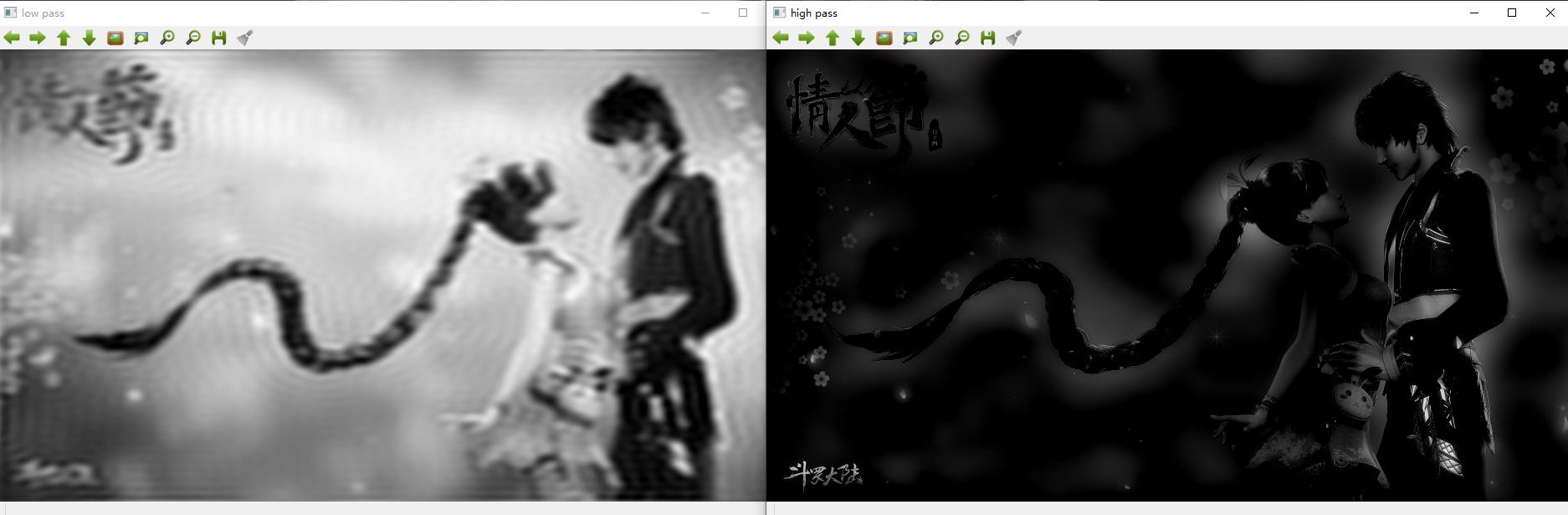
imshow("low pass", lowpass / 255);
imshow("high pass", highpass/255);
waitKey(0);
system("pause");
return 0;
}
// 理想低通滤波器
cv::Mat ideal_low_pass_filter(cv::Mat &src, float sigma)
{
cv::Mat padded = image_make_border(src);
cv::Mat ideal_kernel = ideal_low_kernel(padded, sigma);
cv::Mat result = frequency_filter(padded, ideal_kernel);
return result;
}
// 理想低通滤波核函数
cv::Mat ideal_low_kernel(cv::Mat &scr, float sigma)
{
cv::Mat ideal_low_pass(scr.size(), CV_32FC1); //,CV_32FC1
float d0 = sigma;//半径D0越小,模糊越大;半径D0越大,模糊越小
for (int i = 0; i < scr.rows; i++) {
for (int j = 0; j < scr.cols; j++) {
float d = sqrt(pow(float(i - scr.rows / 2), 2) + pow(float(j - scr.cols / 2), 2));//分子,计算pow必须为float型
if (d <= d0) {
ideal_low_pass.at<float>(i, j) = 1;
}
else {
ideal_low_pass.at<float>(i, j) = 0;
}
}
}
return ideal_low_pass;
}
// 理想高通滤波核函数
cv::Mat ideal_high_kernel(cv::Mat &scr, float sigma)
{
cv::Mat ideal_high_pass(scr.size(), CV_32FC1); //,CV_32FC1
float d0 = sigma;//半径D0越小,模糊越大;半径D0越大,模糊越小
for (int i = 0; i < scr.rows; i++) {
for (int j = 0; j < scr.cols; j++) {
float d = sqrt(pow(float(i - scr.rows / 2), 2) + pow(float(j - scr.cols / 2), 2));//分子,计算pow必须为float型
if (d <= d0) {
ideal_high_pass.at<float>(i, j) = 0;
}
else {
ideal_high_pass.at<float>(i, j) = 1;
}
}
}
return ideal_high_pass;
}
// 理想高通滤波
cv::Mat ideal_high_pass_filter(cv::Mat &src, float sigma)
{
cv::Mat padded = image_make_border(src);
cv::Mat ideal_kernel = ideal_high_kernel(padded, sigma);
cv::Mat result = frequency_filter(padded, ideal_kernel);
return result;
}
// 频率域滤波
cv::Mat frequency_filter(cv::Mat &scr, cv::Mat &blur)
{
cv::Mat mask = scr == scr;
scr.setTo(0.0f, ~mask);
//创建通道,存储dft后的实部与虚部(CV_32F,必须为单通道数)
cv::Mat plane[] = { scr.clone(), cv::Mat::zeros(scr.size() , CV_32FC1) };
cv::Mat complexIm;
cv::merge(plane, 2, complexIm); // 合并通道 (把两个矩阵合并为一个2通道的Mat类容器)
cv::dft(complexIm, complexIm); // 进行傅立叶变换,结果保存在自身
// 分离通道(数组分离)
cv::split(complexIm, plane);
// 以下的操作是频域迁移
fftshift(plane[0], plane[1]);
// *****************滤波器函数与DFT结果的乘积****************
cv::Mat blur_r, blur_i, BLUR;
cv::multiply(plane[0], blur, blur_r); // 滤波(实部与滤波器模板对应元素相乘)
cv::multiply(plane[1], blur, blur_i); // 滤波(虚部与滤波器模板对应元素相乘)
cv::Mat plane1[] = { blur_r, blur_i };
// 再次搬移回来进行逆变换
fftshift(plane1[0], plane1[1]);
cv::merge(plane1, 2, BLUR); // 实部与虚部合并
cv::idft(BLUR, BLUR); // idft结果也为复数
BLUR = BLUR / BLUR.rows / BLUR.cols;
cv::split(BLUR, plane);//分离通道,主要获取通道
return plane[0];
}
// 图像边界处理
cv::Mat image_make_border(cv::Mat &src)
{
int w = cv::getOptimalDFTSize(src.cols); // 获取DFT变换的最佳宽度
int h = cv::getOptimalDFTSize(src.rows); // 获取DFT变换的最佳高度
cv::Mat padded;
// 常量法扩充图像边界,常量 = 0
cv::copyMakeBorder(src, padded, 0, h - src.rows, 0, w - src.cols, cv::BORDER_CONSTANT, cv::Scalar::all(0));
padded.convertTo(padded, CV_32FC1);
return padded;
}
// fft变换后进行频谱搬移
void fftshift(cv::Mat &plane0, cv::Mat &plane1)
{
// 以下的操作是移动图像 (零频移到中心)
int cx = plane0.cols / 2;
int cy = plane0.rows / 2;
cv::Mat part1_r(plane0, cv::Rect(0, 0, cx, cy)); // 元素坐标表示为(cx, cy)
cv::Mat part2_r(plane0, cv::Rect(cx, 0, cx, cy));
cv::Mat part3_r(plane0, cv::Rect(0, cy, cx, cy));
cv::Mat part4_r(plane0, cv::Rect(cx, cy, cx, cy));
cv::Mat temp;
part1_r.copyTo(temp); //左上与右下交换位置(实部)
part4_r.copyTo(part1_r);
temp.copyTo(part4_r);
part2_r.copyTo(temp); //右上与左下交换位置(实部)
part3_r.copyTo(part2_r);
temp.copyTo(part3_r);
cv::Mat part1_i(plane1, cv::Rect(0, 0, cx, cy)); //元素坐标(cx,cy)
cv::Mat part2_i(plane1, cv::Rect(cx, 0, cx, cy));
cv::Mat part3_i(plane1, cv::Rect(0, cy, cx, cy));
cv::Mat part4_i(plane1, cv::Rect(cx, cy, cx, cy));
part1_i.copyTo(temp); //左上与右下交换位置(虚部)
part4_i.copyTo(part1_i);
temp.copyTo(part4_i);
part2_i.copyTo(temp); //右上与左下交换位置(虚部)
part3_i.copyTo(part2_i);
temp.copyTo(part3_i);
}测试效果
注意频率域的频谱迁移哦,我之前写的代码少了这部分导致结果异常,已修复~如果之前有参考错误的同学,麻烦按照上文最新的代码修改下。
另外,如果我的代码有什么问题,欢迎大家提出异议批评指正,一同进步~
如果文章帮助到你了,可以点个赞让我知道,我会很快乐~加油!
以上是关于OpenCV-理想高通&低通滤波器(C++)的主要内容,如果未能解决你的问题,请参考以下文章