TWEN-ASR ONE 语音识别系列教程---多线程与消息队列使用
Posted 初五霸
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了TWEN-ASR ONE 语音识别系列教程---多线程与消息队列使用相关的知识,希望对你有一定的参考价值。
TWEN-ASR ONE 语音识别系列教程(4)—多线程与消息队列使用
提示:作者使用 TWEN-ASR ONE V1.0开发板进行开发学习。
文章目录
前言
经过前面的学习,对ASR程序结构有一定的了解。前面有些代码已经使用了线程,可见线程在ASR程序设计里面的重要性。不禁心里会有些疑问,线程工作原理是什么?多线程谁会先执行?多线程之间是否可以进行信息交换?信息交换是不是队列消息?带着这些问题,在本文尝试找到答案。本文主要内容有:
- 线程的原理与应用;
- 队列消息的原理与应用。
一、多线程的使用与测试
1.1线程使用说明
线程是独立调度和分派的基本单位,是操作系统能够进行运算调度的最小单位。线程和线程之间互不干扰。把需要执行的任务,放在线程块里面,如下图所示:
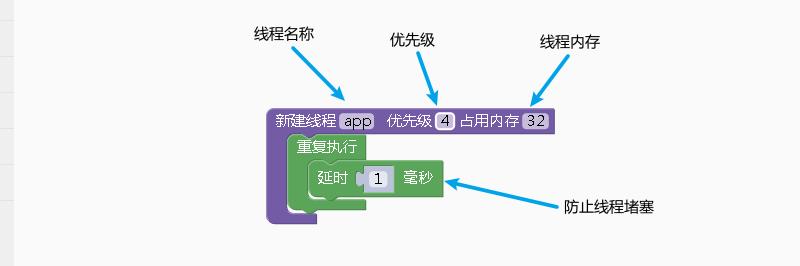
线程名称、优先级、占用内存是新建线程时需要设置的。线程名称建议用有含义的字符名称,如该线程执行的功能名称。优先级就是执行线程的起始顺序,在很短的时间里,线程执行的顺序,我们人感受不到,因为操作系统有调度。占用内存可根据程序内容进行设置,建议设置128字节以上。线程里一般是重复执行的程序块,重复的程序块里一般放有延时函数。为了线程执行更顺畅。
多线程的建立。如下图所示,有两个线程,线程的程序是独立的。

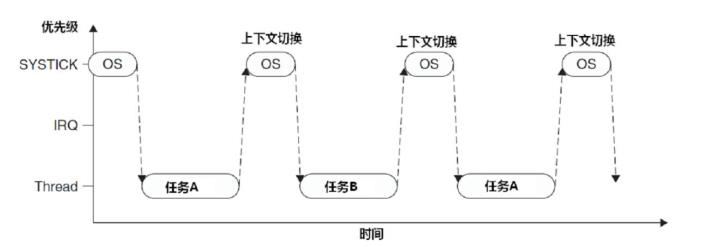
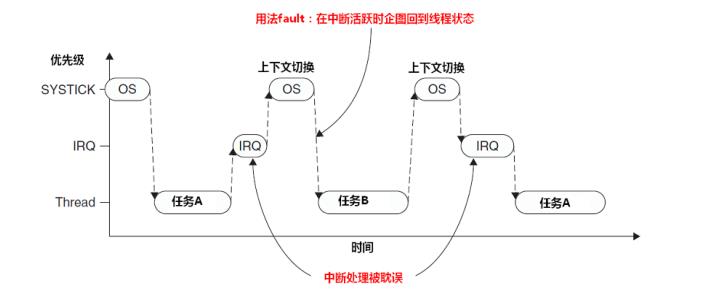
多线程的工作原理:线程执行通过系统的调度完成的。系统有一个时间Tick,时间Tick到切换任务,优先级高的先执行,任务不断切换如此重复执行。例如:图1.2任务A和任务B(除了任务A和任务B,其他任务忽略)。任务A开始执行(因为优先级高),时间Tick到,调用任务B,任务B开始执行。时间Tick到,调用任务A,任务A接着刚才执行,时间Tick到,调用任务B,任务B接着刚才执行。如此类推。由于时间Tick很短,人会觉得两个任务同时执行。这就是多线程的工作原理,也是系统调度最简单的过程。任务调度的过程可参考下面两张图[1]。多线程调度(1)(2)。
总之,多线程是独立运行的。可以完成各自的任务。
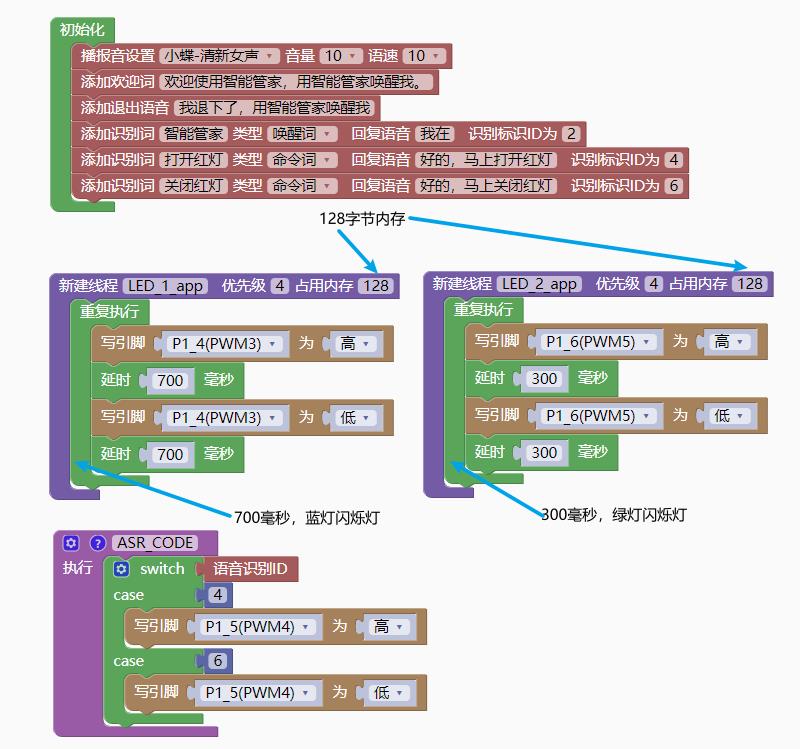
1.2线程代码编写
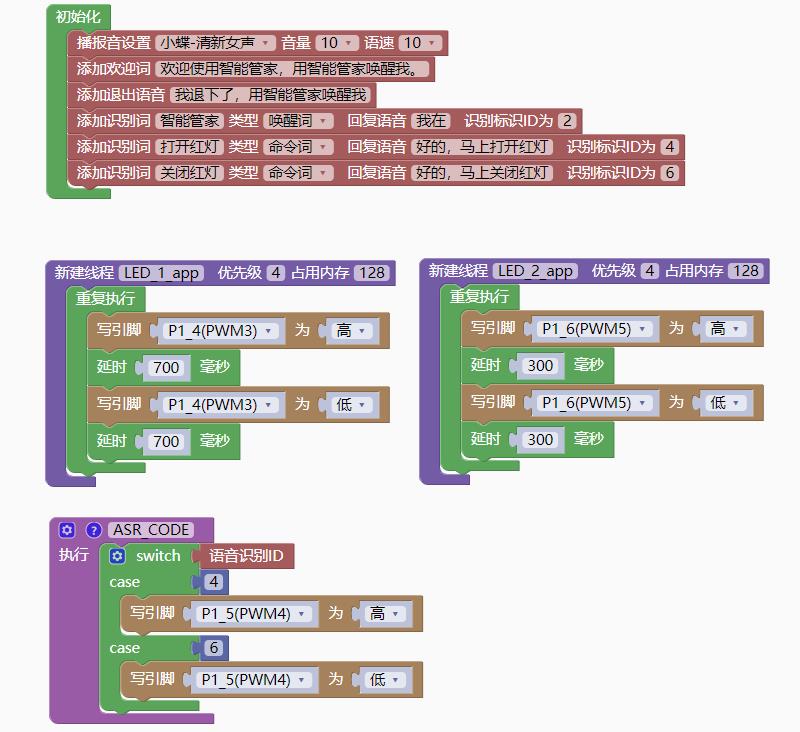
本文多线程使用程序参考官方【5.多线程使用–LED演示范例】。 程序主要是实现蓝灯和绿灯不同频率闪烁,变化时间分别是700毫秒,300毫秒。
1.3线程代码分析
设置了不同的线程名称,优先级一样,占用内容为128字节。如果优先级设置不一样跟容易理解。
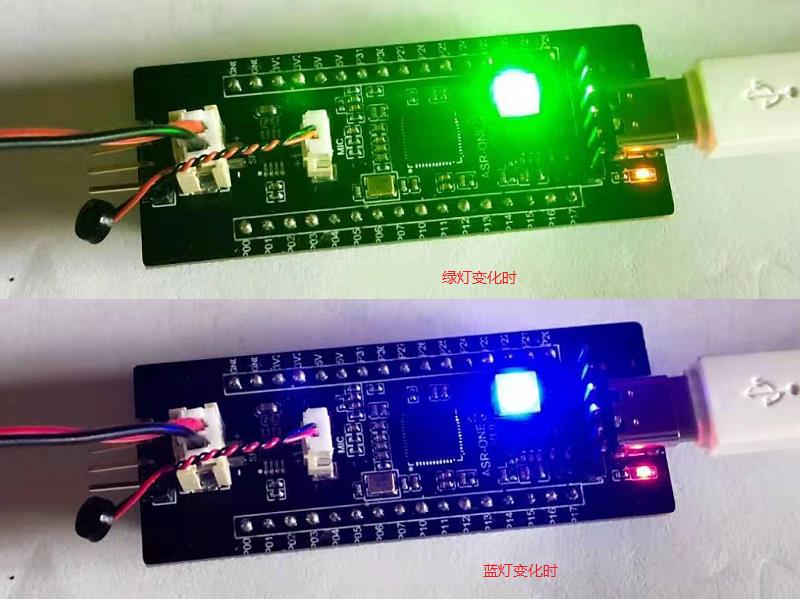
1.4线程运行测试
蓝灯和绿灯闪烁的节奏不一样,如下图所示。从实验现象我们可以看出,两个线程的程序都在运行,并且互不干扰。
二、消息队列的使用与测试
2.1消息队列使用说明
消息队列是一种常用于任务间通信的数据结构,队列可以在任务与任务间、中断和任务间传送信息,实现了任务接收来自其他任务或中断的不固定长度的消息。任务能够从队列里面读取消息,当队列中的消息是空时,挂起读取任务,用户还可以指定挂起的任务时间;当队列中有新消息时,挂起的读取任务被唤醒并处理新消息,消息队列是一种异步的通信方式[2]。
TWEN-ASR ONE 可用程序块有4个,如下图所指示。

(2)发送消息。发送var变量的值。等待时间是当消息数满,是否继续等待,不等待设为0,需要等待根据实际情况设置时间。
(3)接收消息。接收var变量的值。
(4)中断内发送消息。是否在中断中使用?(作者现在也不是很理解,后续弄明白更新此处)
2.2消息队列代码编写
本文消息队列使用程序参考官方【7.多线程使用–消息队列】。 程序主要是实现语音识别后,通过队列消息相关块,根据不同语音ID发送消息到不同线程,线程通过串口打印出来语音ID。。
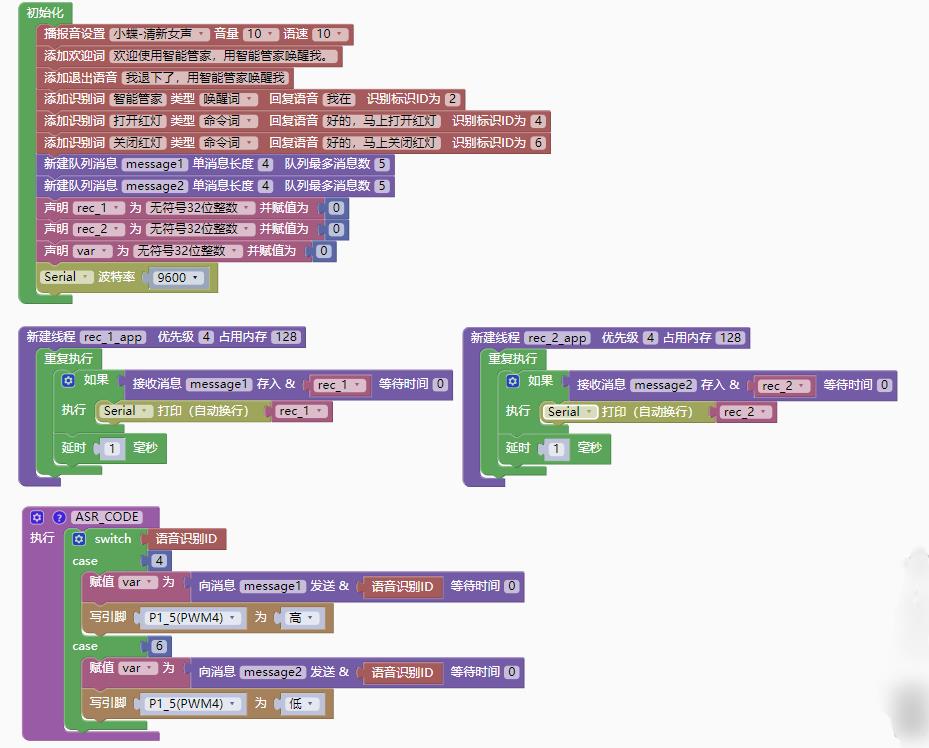
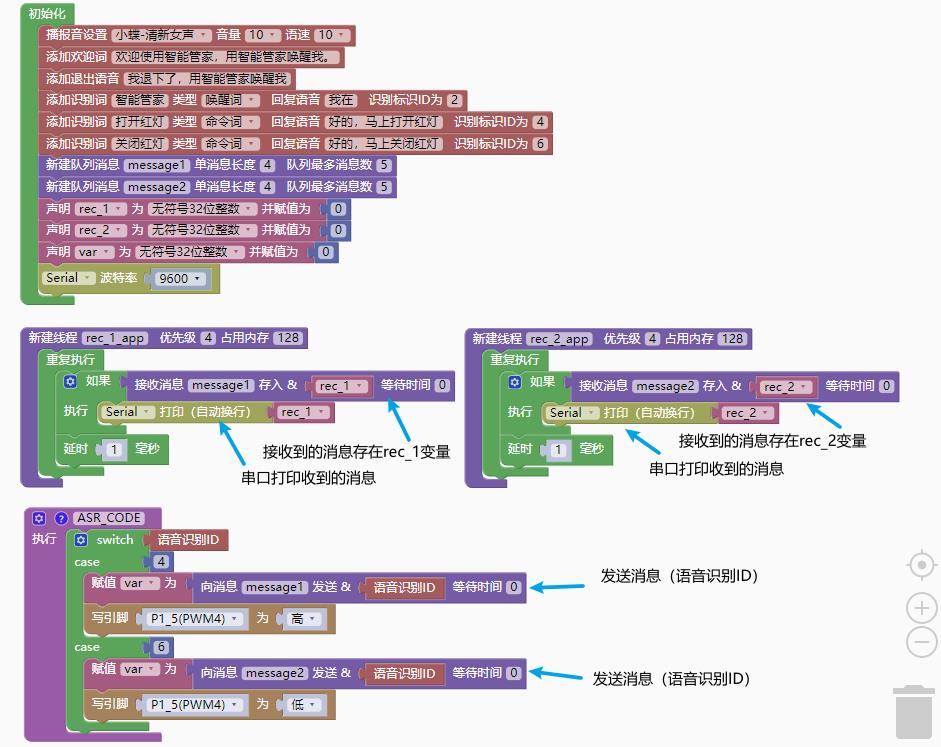
2.3消息队列代码分析
关键注释如下图所示:
2.4消息队列运行测试
运行测试结果如下:
我:智能管家
ASR:我在
我:打开红灯
ASR:好的,马上打开红灯
此时串口收到4。

我:关闭红灯
ASR:好的,马上关闭红灯
此时串口收到6。如图2.5 串口收到数据现象所示。
从测试的实验现象可以看出,打开红灯和关闭红灯会发送消息队列,通过消息队列,不同线程间可以相互共享数据。
三、总结
多线程与消息队列在嵌入式操作系统中是很常用的知识。本文简单介绍了多线程与消息队列的使用,在天问Block里面有对应的程序块提供使用,当然我们在弄清楚多线程优先级、消息列队如何共享消息后,可以很好帮助我们的使用。
参考文章:
[1]UCOS-II 系统的原理和任务-学习日(1)
[2]FreeRTOS消息队列
以上是关于TWEN-ASR ONE 语音识别系列教程---多线程与消息队列使用的主要内容,如果未能解决你的问题,请参考以下文章