PID增量形公式
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了PID增量形公式相关的知识,希望对你有一定的参考价值。
参考技术APID的增量型公式:
PID=Uk+KP*【E(k)-E(k-1)】+KI*E(k)+KD*【E(k)-2E(k-1)+E(k-2)】
PID算法具体分两种:一种是位置式的 ,一种是增量式的。
位置式PID的输出与过去的所有状态有关,计算时要对e(每一次的控制误差)进行累加,这个计算量非常大,而明显没有必要。而且小车的PID控制器的输出并不是绝对数值,而是一个△,代表增多少,减多少。换句话说,通过增量PID算法,每次输出是PWM要增加多少或者减小多少,而不是PWM的实际值。所以明白增量式PID就行了。
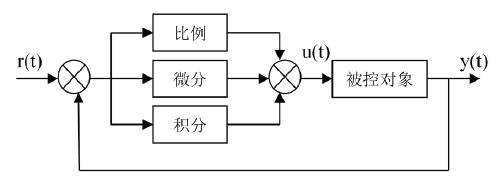
PID控制原理:
本系统通过摆杆(辊)反馈的位置信号实现同步控制。收线控制采用实时计算的实际卷径值,通过卷径的变化修正PID前馈量,可以使整个系统准确、稳定运行。
PID系统特点:
1、主驱动电机速度可以通过电位器来控制,把S350设置为SVC开环矢量控制,将模拟输出端子FM设定为运行频率,从而给定收卷用变频器的主速度。
2、收卷用S350变频器的主速度来自放卷(主驱动)的模拟输出端口。摆杆电位器模拟量
信号通过CI通道作为PID的反馈量。S350的频率源采用主频率Ⅵ和辅助频率源PID叠加的方式。通过调整运行过程PID参数,可以获得稳定的收放卷效果。
3、本系统启用逻辑控制和卷径计算功能,能使系统在任意卷径下平稳启动,同时两组PID参数可确保生产全程摆杆控制效果稳定。
旗形公式
本人自创公式,用来选出形成攻击性平台的品种:
1 // 旗形形态选股公式 2 // 作者:田杰 3 // 最后修改于2020年4月14日 4 5 // 排除新股 6 notNew := TOTALBARSCOUNT > 250; 7 8 // 排除ST 9 notST := !NAMELIKE(‘ST‘) AND !NAMELIKE(‘*ST‘); 10 11 // 排除停牌 12 notStop := DYNAINFO(4) > 0; 13 14 // 股价应处于20日移动平均线上方 15 upMa := LOW >= MA(CLOSE, 20); 16 17 // 最近20日是否创下一年新高 18 isHigh := HHV(HIGH, 20) >= HHV(HIGH, 250); 19 20 // 是否形成攻击性平台 21 // 至少4天内,股价在10个点之内振荡 22 waitDay := 4; // 最少振荡天数 23 waitSize := 0.1; // 最大振荡幅度 24 highPrice := MAX(HHV(OPEN, waitDay),HHV(CLOSE, waitDay)); 25 lowPrice := MIN(LLV(OPEN, waitDay),LLV(CLOSE, waitDay)); 26 priceSize := (highPrice - lowPrice) / lowPrice; 27 isWaiting := priceSize <= waitSize; 28 29 // 旗形最低价格不低于最近一年最高价10个点 30 // 排除冲高后急速回落形成的旗形 31 yearHighPrice := MAX(HHV(OPEN, 250),HHV(CLOSE, 250)); 32 priceNotTooLow := (yearHighPrice - lowPrice) / yearHighPrice <= waitSize; 33 34 // 旗形最低收盘价高于20天前的一年新高价格 35 // 旗形应形成于新高位置 36 lastHighPrice := FINDHIGH(CLOSE, 20, 230, 1); 37 lowClosePrice := LLV(CLOSE, waitDay); 38 upLastHigh := lowClosePrice >= lastHighPrice; 39 40 ok := notNew // 排除新股 41 AND notST // 排除ST 42 AND notStop // 排除停牌 43 AND upMa // 20日均线上方 44 AND isHigh // 最近创下过一年新高 45 AND isWaiting // 形成攻击性平台 46 AND priceNotTooLow // 排除急速回落形成的旗形 47 AND upLastHigh; // 旗形形成于新高位置 48 49 RET:ok;
转载请注明出处:https://www.cnblogs.com/jietian331/p/12701479.html
以上是关于PID增量形公式的主要内容,如果未能解决你的问题,请参考以下文章