STM32入门笔记——PWM
Posted 若你遇见她
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了STM32入门笔记——PWM相关的知识,希望对你有一定的参考价值。
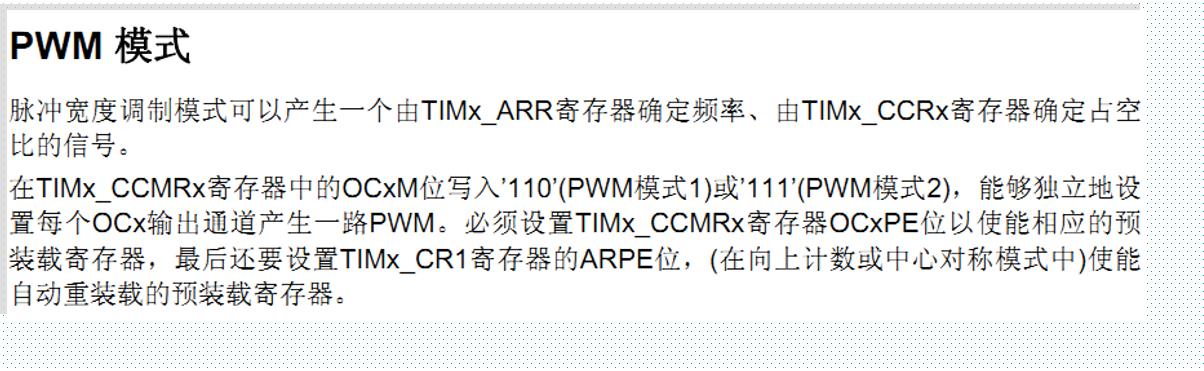
PWM概述
1、什么是PWM
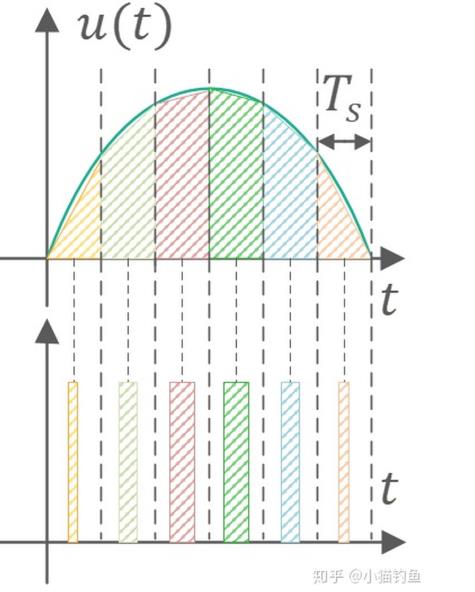
PWM是一种对模拟信号电平进行数字编码的方法。通过高分辨率计数器的使用,方波的占空比被调制用来对一个具体模拟信号的电平进行编码。PWM信号仍然是数字的,因为在给定的任何时刻,满幅值的直流供电要么完全有(ON),要么完全无(OFF)。电压或电流源是以一种通(ON)或断(OFF)的重复脉冲序列被加到模拟负载上去的。通的时候即是直流供电被加到负载上的时候,断的时候即是供电被断开的时候。只要带宽足够,任何模拟值都可以使用PWM进行编码。
简单来说 : PWM即脉冲宽度调制,PWM是一种利用数字信号对模拟电路控制的方式。
2、10系列的PWM知识
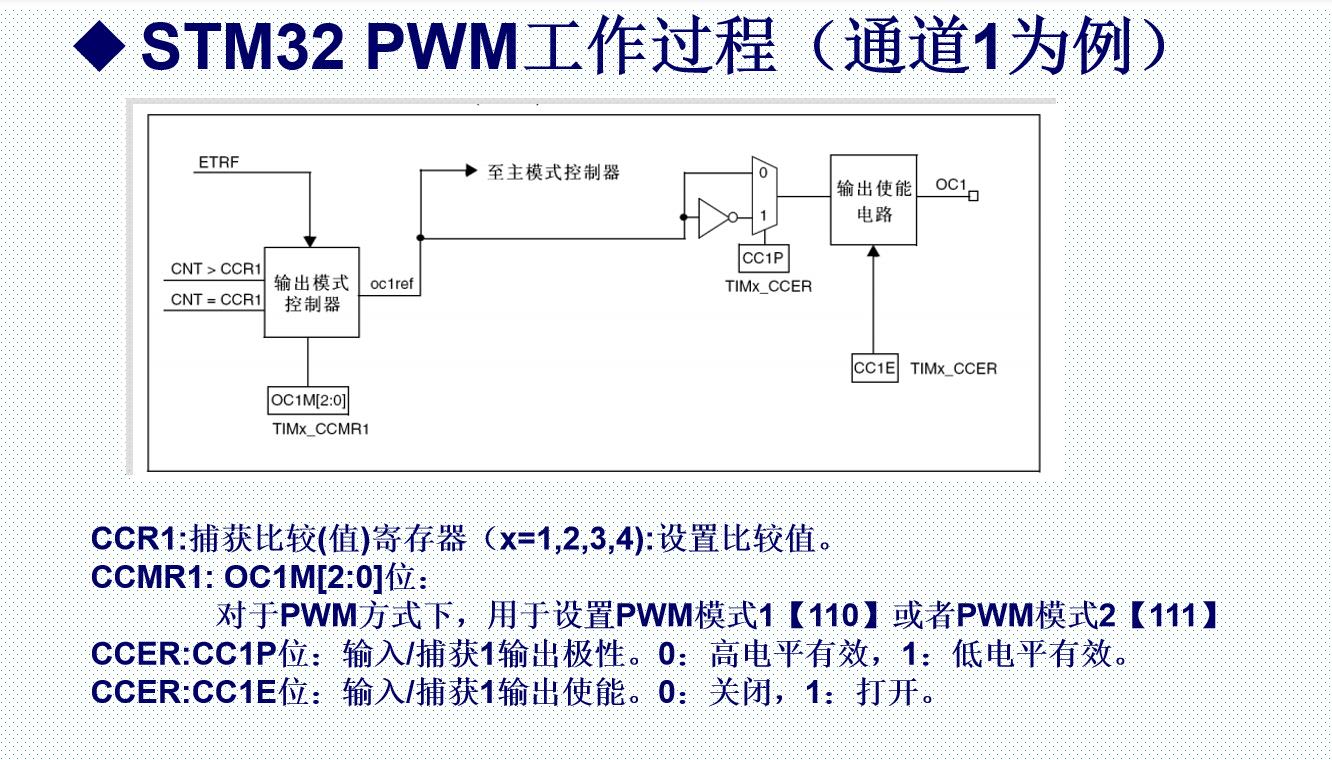
工作原理:在其定时器相应寄存器计数时,会将其值与比较寄存器(CCRX)中的值进行比较。计数器值大于比较寄存器时,输相应电平。在其小于比较寄存器时输出相反电平。
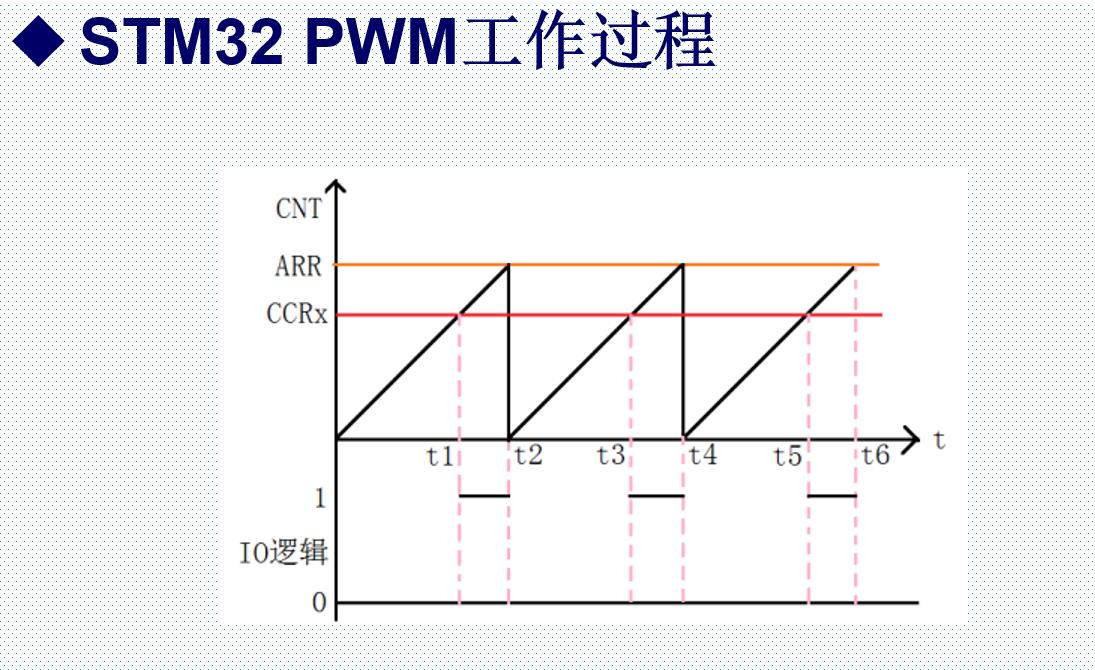
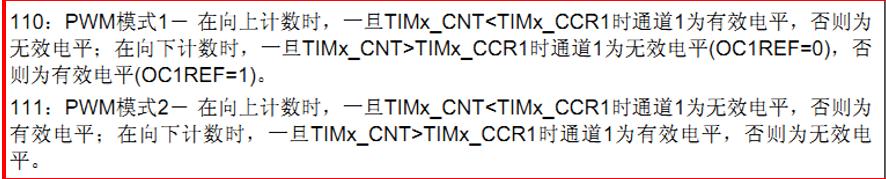
工作过程:输出什么有效电平由PWM模式和输出输入极性决定
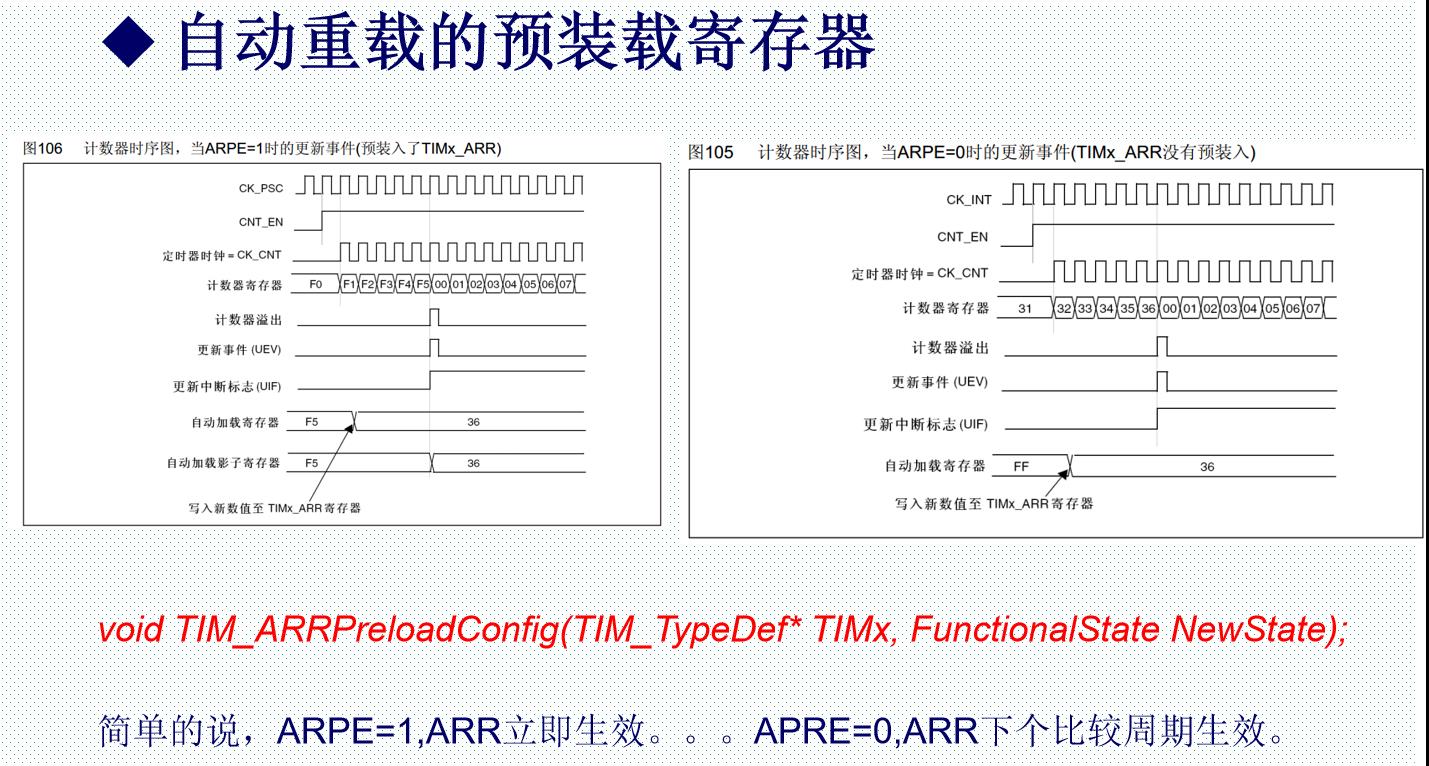
这里预装载值变化意思是:在你变动比较寄存器的时刻,定时器还在计数。比如最大值时100,你将比较值从50调整到80。调整的时刻计数器正好在70.那么在其计数到80时,要不要响应对比这个值。就由ARPE决定。当其为1,则本次响应。若其=0,则本次不响应,等下一周期再响应。
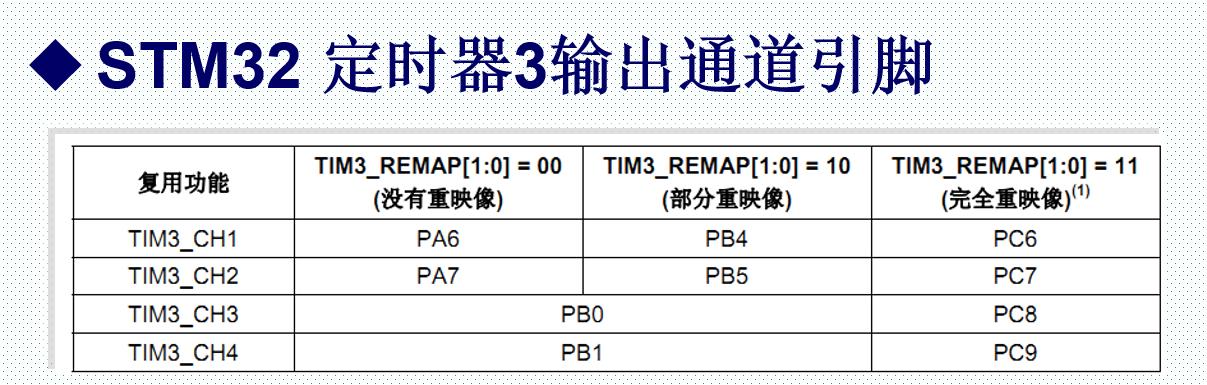
其他引脚详情参考对应芯片资料。
PWM实际操作
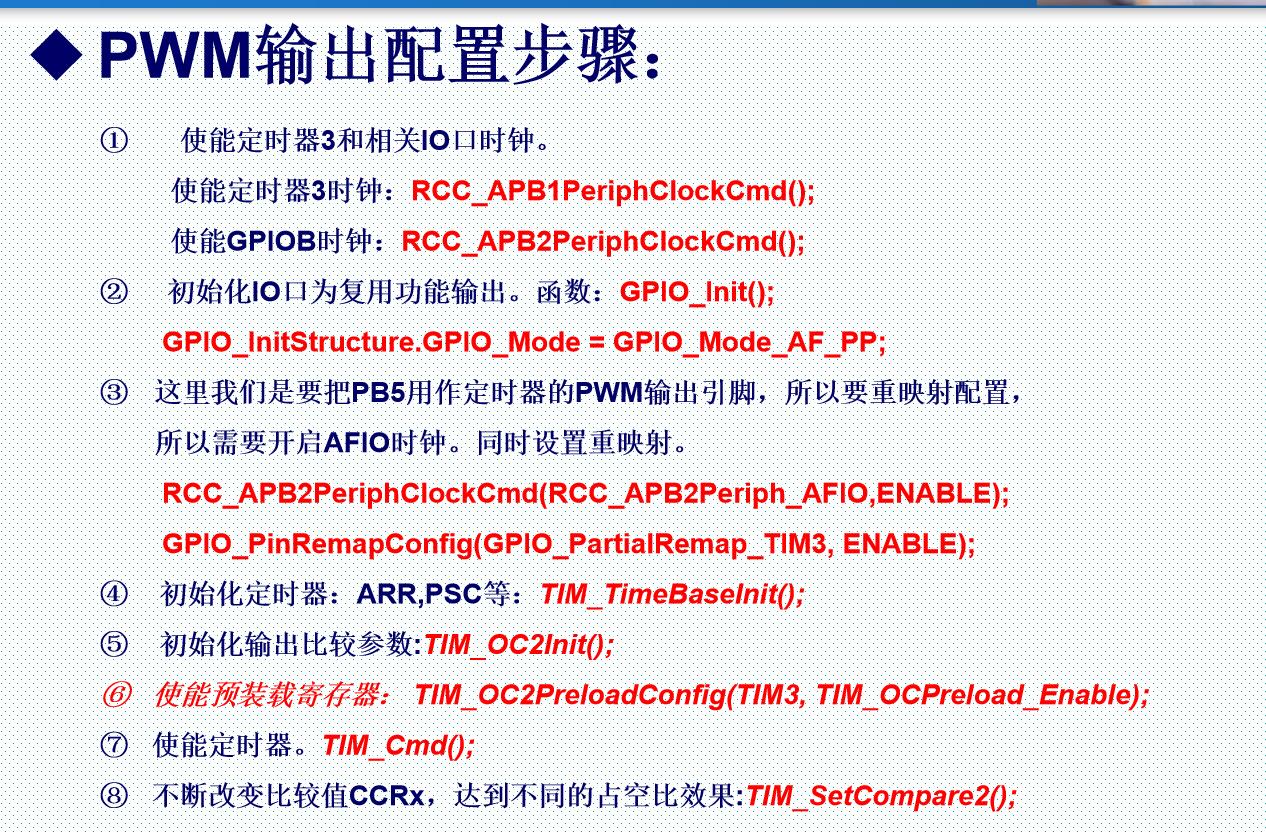
库函数配置步骤
这里需要注意:GPIO配置是PB5的部分映射
通过更改ccrx寄存器值改变占空比
代码如下
void TM3_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure; //GPIO实例化
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; //定时器TIM3初始化实例化
TIM_OCInitTypeDef INITTIM_; //模式实例化变量
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //时钟使能
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE); //GPIOB和端口复用时钟使能时钟使能
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE); //Timer3部分重映射 TIM3_CH2->PB5
//GPIO
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //TIM_CH2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIO
//初始化定时器
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据指定的参数初始化TIMx的时间基数单位
TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE ); //使能指定的TIM3中断,允许更新中断
//初始化PWM模式
INITTIM_.TIM_OCMode = TIM_OCMode_PWM2; //模式为模式2
INITTIM_.TIM_OCPolarity = TIM_OCPolarity_High; //有效电平模式,此次为高电平
INITTIM_.TIM_OutputState = TIM_OutputState_Enable;
INITTIM_.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC2Init(TIM3,&INITTIM_); //实例化变量赋值
TIM_OC2PreloadConfig(TIM3,TIM_OCPreload_Enable); //使能输出比较预装载值
TIM_Cmd(TIM3, ENABLE); //使能TIM3
int main(void)
{
u16 led0pwmval=0;
u8 dir=1;
delay_init(); //延时函数初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级
uart_init(115200); //串口初始化为115200
LED_Init(); //LED端口初始化
TM3_PWM_Init(899,0); //不分频。PWM频率=72000000/900=80Khz
//delay_ms(1110);
while(1)
{
delay_ms(10);
if(dir)
led0pwmval++;
else
led0pwmval--; //led0pwmval先自增到300,再自减到0
if(led0pwmval>300)
dir=0;
if(led0pwmval==0)
dir=1;
TIM_SetCompare2(TIM3,led0pwmval); //更改ccrx寄存器的值,改变占空比
}
}
}
以上是关于STM32入门笔记——PWM的主要内容,如果未能解决你的问题,请参考以下文章
STM32CubeMX笔记--定时器生成PWM特定波形,控制舵机转动