双足轮机器人SK8O技术详解--摘要和介绍翻译
Posted 灯哥开源
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了双足轮机器人SK8O技术详解--摘要和介绍翻译相关的知识,希望对你有一定的参考价值。
摘要
本论文主要研究双足轮式机器人的建模与控制。主要目标有三个:提供控制设计所必需的仿真工具,设计一个能够平衡和操纵机器人的控制系统,找到一个可行的跳跃轨迹。首先,利用欧拉-拉格朗日方程建立了机器的非线性平面模型。此外,在 Gazebo 机器人仿真软件中创建了一个 3D 仿真环境。在整个论文中会使用这个 3D 仿真器进行验证和测试。然后,设计了由两个独立部分组成的控制器。使用带积分控制的线性二次控制器(LQR)控制车轮,这个控制器是基于线性化两轮倒立摆三维模型的。两种比例微分(PD)控制器用于控制机器人的腿部。而且实现了基于无迹卡尔曼滤波 (UKF)的状态估计和基于优化的跳跃轨迹计算方法。最后,在实物机器人上测试了 LQR 控制器和 PD 控制器,并给出了实验结果。
关键词:双足轮式机器人,Gazebo,LQR,跳跃轨迹计算,UKF
1 介绍
在本论文中,我着力于双足轮式机器人的建模、仿真和控制。我给出了机器人的简化平面模型、控制系统和跳跃轨迹的计算方法。我在一个基于物理的仿真器中验证了所有的部分,并成功地将设计的控制器用于实物机器人的稳定和转向。用一个视频记录了结果,代码发布在 gitlab 仓库中。
1.1 问题陈述
本文的目的有三个方面。首先,在机器人仿真软件中创建机器人三维仿真的环境。其次,设计一个简单的控制系统,能够平衡和操纵机器人。最后,建立了机器人的平面模型并进行了跳跃轨迹的计算。这三个方面旨在构成机器人的基本仿真和控制工具,机器人是我同事设计的,同时在制造它的原型来完成本论文的工作。这要感谢我的同事们,尽管出现了第二波 COVID-19 疫情,他们还是在12月初完成了原型,我也能够在实物机器人上测试设计的控制器。
1.2 相关工作
随着近年来移动机器人的日益普及,各种原始的腿部系统的数量也在增加。毫无疑问,最著名的是由波士顿动力制造的机器人,即双足人形机器人 Atlas 、四足机器人 Spot 和两轮人形机器人 Handle 。其中,我想提到 ANYmal 机器人[1],[2]和 Ascento 机器人[3],[4],这是我们的机器人共享相同拓扑结构的灵感来源。
在 ANYmal 机器人和最新的 Ascento 机器人论文中[4],他们实现了所谓的全身控制(WBC)[5],这是一种现代的基于实时优化的控制方法,需要机器人的完整模型。尽管在多腿式机器人项目中,WBC是一种性能良好的方法。但由于其设计和实现的复杂性,它并不适合本文的目标。在 Ascento 机器人的第一篇论文[3]中,作者在线性化倒立摆模型的基础上考虑到模型的简单性,采用 LQR 方法,取得了较好的效果。这也是我选择的方法。
1.3 机器人描述
在写论文的时候,机器人没有任何的文件资料。因此,我在这里简要描述与本论文相关的结构和电子方面的知识。我想强调的是,我没有参与任何设计、构建或编程任务,本节中描述的一切都是我的同事做的工作。
在 图1.1 中我们的机器人与 Ascento 机器人具有相同的拓扑结构,有两个带闭合运动链的轮式腿。每只膝盖上都有一个扭转弹簧,用来抵消平衡位置的重量。此外,大部分零件都是用 3D 打印机制作的,包括轮胎。在第二章中列出的尺寸和其他参数与实际值不同,因为它们在设计过程中发生了变化或者是没有被认出来。
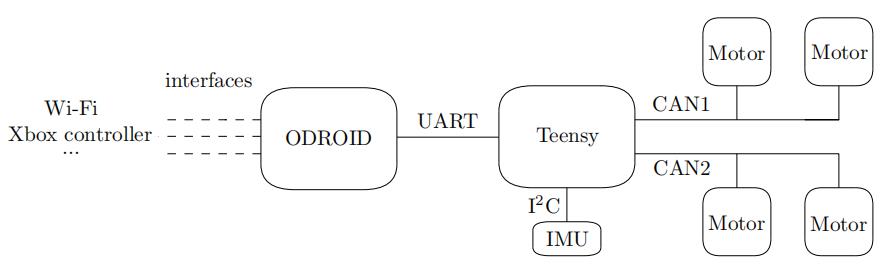
所使用的电路系统原理图如 图1.2 所示。该机器人有4个 eX8108 105KV 的无刷直流电机。两个安装在车轮上,其余两个安装在黑色连杆与车身两侧的连接处,以及用 1:16.5 的齿轮变速箱,以增加最大的可达到的扭矩。电机由四个 40 kHz 的三相控制器驱动,提供位置、速度、电流反馈以及相应的测量值。机器人控制回路在Teensy 4.0上以 1 kHz 的频率运行,通过CAN连接驱动程序。在每次迭代中,Teensy向驱动器发送位置、速度、电流(扭矩)参考和PD控制器的参数。此外,ICM-42688-P IMU 还可以在 2 kHz 下测量身体的线性加速度和角速度。这些测量值被一个截止频率为 1 kHz 的低通滤波器过滤,并通过 I2C 发送到 Teensy 。最后,ODROID N2+ 和 Teensy 进行通信,通过 2 M baud/s 的 串口与其他计算机和接口通讯。整个系统由一个常用的 24V(6S) 电池供电。
在硬件的基础上,制定了以下规格:
- 控制回路的采样频率为 1 kHz。
- 测量的量是电机位置、电机速度、电机扭矩、俯仰角、滚转角、俯仰速率、滚转速率和偏航速率。
- 电机施加的扭矩不应高于 2NM 。

1.4 概述
本文共分为五章。第二章推导了机器人的简化平面模型,并评估了 Gazebo 仿真软件中三维仿真环境。第三章专门讨论控制系统。我描述了基于倒立摆的 LQR 设计,无迹卡尔曼滤波器的设计,以及基于优化的跳跃轨迹计算。第四章为机器人实验。在第五章中,通过讨论所取得的成果和提出未来的改进建议,对论文进行了总结。
双足轮开源技术交流QQ群:543613782
以上是关于双足轮机器人SK8O技术详解--摘要和介绍翻译的主要内容,如果未能解决你的问题,请参考以下文章