四足机器人SOLO技术详解--实验与结果翻译
Posted 灯哥开源
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了四足机器人SOLO技术详解--实验与结果翻译相关的知识,希望对你有一定的参考价值。
Ⅲ. 实验与结果
在本节中,我们介绍了对2自由度的腿和四足机器人的实验。我们量化了系统的阻抗调节功能,然后我们提出了一个控制器来跟踪使用 Kinodynamic 优化器计算出的运动,并演示了四足机器人运动时的动作。
A. 2 自由度腿的阻抗控制
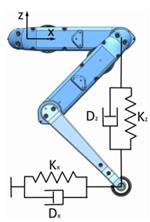
我们通过测量在准静态和硬冲击条件下腿部的刚度的变化范围来表现其阻抗控制能力,这可以在进行调节。我们制作了一个试验台(图5)用仪器来辅助测试,以便更好观察实验。一个笛卡尔(Cartesian)阻抗控制器(图4b)调节脚与臀部间的刚度和阻抗控制。
τ
=
J
T
(
K
(
x
d
−
x
)
−
D
x
˙
)
\\tau = {J^T}(K({x_d} - x) - D\\dot x)
τ=JT(K(xd−x)−Dx˙),这里的
x
∈
R
2
x \\in {R^2}
x∈R2为腿相对于臀部的位置(腿部长度)。
x
d
∈
R
2
{x_d} \\in {R^2}
xd∈R2 为弹簧的设定点,
J
J
J 为腿的雅可比矩阵,
K
K
K 和
D
D
D 为腿部刚度和阻抗控制矩阵和
τ
∈
R
2
\\tau \\in {R^2}
τ∈R2 为电机转矩。力矩控制仅仅基于电机内部电流和电机处测量,没有任何力反馈。我们使用测试台上的外部参考传感器来验证阻抗控制的效果。
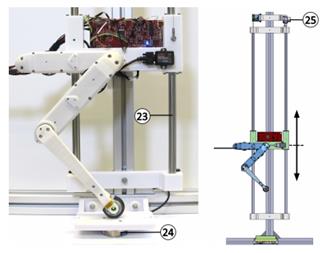
23:带直线导轨的腿部试验台
24:一个6轴ATI Mini40力传感器
25:测量到的地面反作用力。弦线电位计测量腿的高度
1)准静态实验:
我们系统地描述了在准静态运动中脚部的刚度变化范围。机器人保持在固定位置,同时我们缓慢推动脚部使其产生偏转。我们使用额外的地面实况传感器(力板和弦线电位计)测量了地面反作用力和腿的长度。在这次的实验中, D = 0 D=0 D=0,我们发现在慢速运动中,调节 20 N / m 20N/m 20N/m 到 360 N / m 360N/m 360N/m 之间的期望刚度范围,就能满足我们所需的刚度要求。没有阻抗控制调节的情况下增大其刚度腿开始变得不稳定。需要注意的是,使用少量阻抗控制调节可以进一步增加承受的最大刚度,从而避免腿部变得不稳定(此处未显示)。
实验结果见图6。我们观察到所有期望刚度值的垂直地面反作用力和垂直腿位移之间的接近线性关系,直到达到执行机构的极限为止(图6)。由于电机力矩限制(最大施加电流)和腿部运动学的共同作用,腿部的最大受力(黑线部分)受到限制。此线性关系与腿部压缩变形无关,这表明线性阻抗控制律适用于广泛的位移运动中(对于低于力矩饱和极限的情况,最长可达 10 cm)。
我们使用线性回归估算了腿部刚度,其中我们排除了饱和区域中的数据点。在没有阻抗控制的情况下,对于低于 150 N / m 150 N/m 150N/m 的指令刚度,测得的腿部刚度与所需刚度非常匹配,而在更高的所需刚度时,测量显示的刚度偏低。在对于 360 N / m 360 N/m 360N/m 的指令刚度是,最大测量刚度约为 266 N / m 266 N/m 266N/m。
实验证明了机器人可以用一个简单的控制律来调节腿部刚度,而无需使用力矩感应。实验数据显示了力-位移关系的线性关系。实际刚度和指令刚度之间高刚度状态的差异可能是由于其他动态效应造成的,包括摩擦、传动的灵活性和关节位置测量中的误差(即编码器测量电机位移,而不是关节运动)。
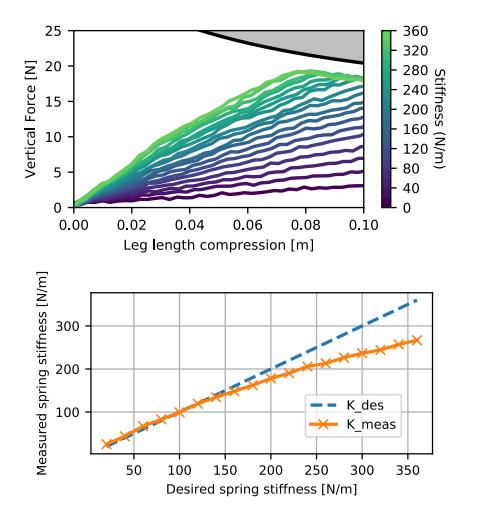
图6:上图:垂直地面反作用力与腿部压缩力,所需刚度范围为 20 N / m 20 N/m 20N/m 至 360 N / m 360 N/m 360N/m,增量为 20 N / m 20 N/m 20N/m。黑色渐进下降曲线表示理论上最大腿部力,由最大膝盖力矩和两段腿部运动学计算得出。下图:所需的腿弹簧刚度与测量的腿弹簧刚度(由曲线图的线性回归直线算出)。
2)下坠实验:
2自由度的腿从 0.24 m 0.24 m 0.24m 的高度落下,设定腿刚度为 150 N / m 150 N/m 150N/m,阻抗控制为 0.5 N s / m 0.5 N s/m 0.5Ns/m。这个实验通过同时产生的高力矩和转速展现腿的阻抗能力。图 7(上图)显示了接触力的典型时间演变。在受到冲击的前 50 m s 50ms 50ms 内,接触力反馈出现巨大的波动。摩擦和变形损失可以通过与理想腿的力的偏差看到:着地和中间站姿之间的偏差较大,而中间站姿和脚尖离地之间的偏差较小。损失减少使得第二个峰值振幅也变下。在2自由度腿、垂直滑块和电子设备的共同重力下,腿力稳定在 6 N 6 N 6N 左右。
图7(下图)显示了工作空间中的迟滞现象,并指出了结构系统变形中的摩擦带来的损失。滞后现象/损耗(hysteresis)可以用库仑摩擦力(Coulomb friction shifting forces)来解释,过大或过小取决于位移方向。这些滞后/损耗(hysteresis)可以通过主动控制来补偿,但是这并不是本实验的目标。冲击后的低方差显示该系统具有良好的重复性(repeatability)。腿部压力与地面反作用力之间保持线性关系。
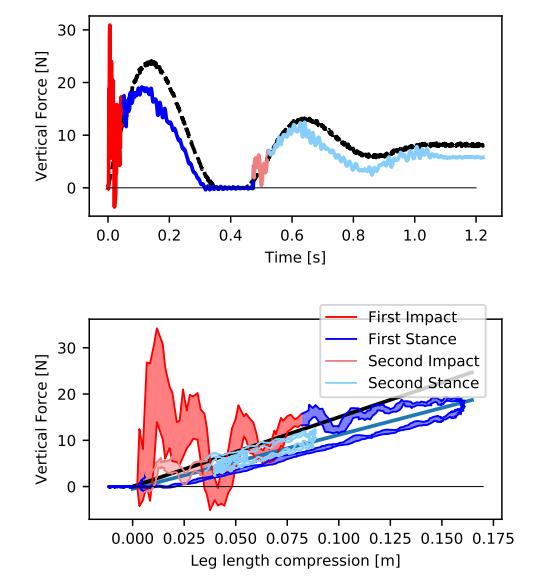
图7:重复十次的跌落实验:腿部反弹两次(第一次反弹为红色和蓝色,第二次反弹为浅红色和浅蓝色)。黑线表示所需的力响应(所需刚度乘以从高度传感器测量的腿部压缩)。上图:一个典型实验的腿力随时间的变化。下图:腿力是腿压缩的函数(十个实验的总结)。包络线是平均值± 标准差。蓝色直线是站姿数据的回归近似值( K = 116 N / m K=116 N/m K=116N/m, D = 0.5 N / s / m D=0.5 N/s/m D=0.5N/s/m)。
3)跳跃实验:
我们已经在[32]中演示了该腿的初步版本的跳跃能力。在这里,我们实现了一个简单的周期性垂直运动,用联合位置控制器来生成跳跃行为。这条腿大约可以跳 0.65米,大约是它腿长度的两倍,是静止腿长度的 2.7倍。这个机器人在着陆时没有造成任何损坏。这证明了我们的系统产生动态运动的能力。
4)接触传感器(足底传感器)验证:
为了验证接触传感器的性能,我们在腿部试验台上进行了一系列不同腿部长度( l d e s = 20 c m {l_{des}} = 20cm ldes=20cm 和 l d e s = 30 c m {l_{des}} = 30cm ldes=30cm,接近奇异性)和阻抗( 75 , 150 和 300 N / m 75,150 和300N/m 75,150和300N/m)的跌落试验。我们通过比较接触传感器的性能和设定指定电流产生的力(此力通过计算得出与实际有误差) ( F = ( J a T ) − 1 τ ) (F = {(J_a^T)^{ - 1}}\\tau ) (F=(JaT)−1τ)。每个传感模态都需要一个阈值来识别接触。对于接触式传感器,我们将阈值设置为标准值的50%,与测试力传感器检测与地面实际接触的最大延迟为 3 m s 3 ms 3ms(图8)。如果通过电机电流来估计关节的力矩来判断是否与地面接触最大延迟约为 31 m s 31ms 31ms,而其中脚落地整个接触持续时间约为 100 ms,这对动态的运动实验带来很大的影响。设置较低的阈值会导致改变腿长或阻抗后经常出现位置的检测错误。使用更先进的算法——联合电流和全驱动器驱动系统模型,能以算法复杂度为代价改进检测,而我们的接触传感器提供了一个简单、轻量级和稳定的解决方案。
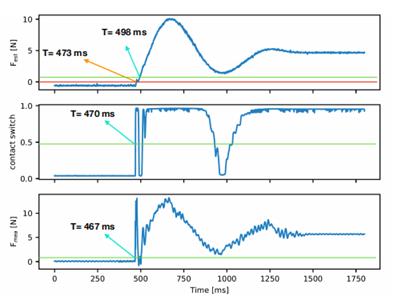
图8:我们注意到接触传感器(中)与由电机电流预测力接触(上)相比,出现一个尖锐的接触检测。下图显示了由高分辨率的力传感器识别的地面真实情况。
B. 四足机器人的动态特性
在此我们展视四足机器人的灵活性及性能。我们展视了首个使用基于质心动力学的 kino-dynamic 动态优化器[9],[22]计算机器人真实运动的实验。
1) kino-dynamic动态优化器和控制器:
机器人的运动规划使用的是在[9]中提出的全身运动动态优化器。该算法对以下两方面进行优化: 1) 机器人的质心动力学(即其质心、线性和角动量)以及接触力轨迹 2) 全身的运动学。经过几次迭代,两个优化问题之间已经能够相互协调,使得局部最优轨迹也是机器人全局最优轨迹。在我们的实验中,最终结果是在两次迭代之后实现的。用文献[22]提出的算法解决质心动力学的优化问题。
类似于多触点平衡的无源控制器(passivity controller for multi-contact balancing)[7],我们的控制器计算出分配到每条腿的接触力(contact forces),使得质心(center of mass ,CoM)处能有足够功(wrench)来调节质心、角动量和基础定向轨迹。与[7]不同的是,我们调节机器人的角动量,并为每只腿的运动添加一个低阻抗控制器,这对于研究硬碰撞情况下的动态实验非常重要。在质心的功WCoM由公式2得出,

式中的 x c {x_c} xc、 K K K 和 q b {q_b} qb 分别是测量的质心位置、角动量和基准方向(base orientation)(四元数),上标ref 表示运动优化器的参考值(reference trajectories )特别是 W C o M r e f W_{CoM}^{ref} WCoMref 为作用质心上的参考值。 K c {K_c} Kc, K b {K_b} Kb, D c {D_c} Dc 和 D b {D_b} Db 为正定的增益矩阵。在我们的实验中,我们手动设置这些增益举证(对角矩阵),但也可以使用[8]开自动生成。在使用Lie group和Lie algebra将两个四元数转化为角动量时产生方位误差,旋转映射函数需要将其进行校正。该公式假设质心位于基架原点(因此它的位置在这个框架中是恒定的),因为大部分机器人质量位于其基架其假设情况与实际情况基本符合。同时假设了一个恒定的惯性张量( Inertia Tensor) 确保在混合方(mixing orientation)和角动量的控制中保持一致性/稳定(consistency)。在每次控制循环中,都要通过求解两次计算得出接触中每只脚的力分配。
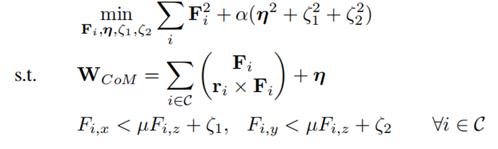
其中
C
C
C 是地面接触脚的一组编号(接触激活是使用平面图和接触传感器反馈确定的),
η
\\eta
η ,
ζ
1
{\\zeta _1}
ζ1 和
ζ
2
{\\zeta _2}
ζ2 是确保
Q
P
QP
QP 始终可行的松弛变量,
α
\\alpha
α 是一个很大的常数(large weight),
r
i
{r_i}
ri 是
i
i
i 腿到质心之间的一个向量,
µ
µ
µ 是摩擦系数,
z
z
z 是与地面正交的方向。找到最佳的脚力分配,之后进行每个关节驱动力矩的计算,如下:

其中
J
i
,
a
{J_{i,a}}
Ji,a 是腿部的雅可比矩阵,
I
I
I 是脚与原点间的向量,索引
i
i
i 对应于每条腿。此算法可以结合抗阻
构对腿部进行综合计算。
2) Solo 的运动性能:
Solo机器人的腿部关节最多能旋转约三周。图9展视了Solo如何在各种情况下利用这项功能。SOLO的膝关节可以向两个方向弯曲,并根据需要将机器人塑造成“X”、“O”型膝关节姿势,或前后“C”型膝关节姿势(图9a)。例如在图9b中,它向后弯曲膝关节,将腿部先放在障碍物顶部从而越过障碍物。我们设计了一个简单的动作序列(图9c),允许SOLO在翻身后站起来。我们注意到,四足动物无法通过运动学实现这三种行为。
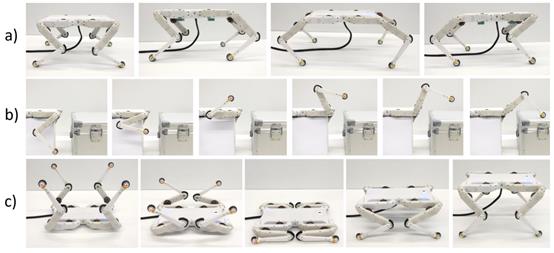
图9:
a)腿可以在所有四个膝盖配置之间切换,
b)髋关节超过360◦ 的旋转能力,在小空间内操作,腿可以先向后旋转,然后上台阶,
c)c如果机器人倒地,它可以重新调整腿的方向,站起来而不旋转躯干。
3) 追踪kino-dynamic的规划:
我们首先测试了控制器在不同的场景中平衡情况,这些测试可以在附加的视频中看到。结果表明,该机器人能够在不确定环境的情况下在运动中保持平衡。在跳跃运动,以及慢速和快速行走中的稳定情况,实验结果表明,该机器人能够按照预期的方案进行运动。虽然这些实验中的计算规划的时间相对较长(例如步行实验为15秒),但机器人完成计算规划后在下次运行时不需要重新规划(no replanning is required for the robot to achieve the task.)。在慢行运动中,我们添加了一个跷跷板障碍物,该障碍物并没有在优化器和控制器预先设置当中,但机器人能够毫无问题地穿越地形。这些结果表明,该控制器对不确定环境足够地稳定,并能在长运动规划也能稳定运行,这表明尽管机器人的动力学模型与实际系统即使存在差异,但是由 kino-dynamic优化器生成的规划在实际测试中是可行的。我们还进行了垂直跳跃,底部离地高度达到了65厘米的(图1),着陆时没有受到损伤。
双足轮开源技术交流QQ群:543613782
参与翻译者:灯哥开源团队,BQ
原文论文:An Open Torque-Controlled Modular Robot Architecture for Legged Locomotion Research——Felix Grimminger1, Avadesh Meduri1,3, Majid Khadiv1, Julian Viereck1,3, Manuel W¨uthrich1 Maximilien Naveau1, Vincent Berenz1, Steve Heim2, Felix Widmaier1, Thomas Flayols4 Jonathan Fiene2, Alexander Badri-Spr¨owitz2 and Ludovic Righetti1,3
以上是关于四足机器人SOLO技术详解--实验与结果翻译的主要内容,如果未能解决你的问题,请参考以下文章