双足轮机器人SK8O技术详解--实物机器人的结果结论翻译
Posted 灯哥开源
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了双足轮机器人SK8O技术详解--实物机器人的结果结论翻译相关的知识,希望对你有一定的参考价值。
4 实物机器人的结果
在本章中,我将展示一下我(和我的同事)对实物机器人测试获得的结果。由于实验时间有限,我们在没有添加UKF的情况下实现了第三章中提出的控制系统。对控制器(主要是身体电机的PD调节器)的参数进行了调优,以反映与仿真模型中参数的差异。
4.1 实验
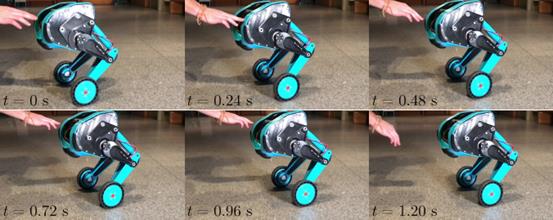
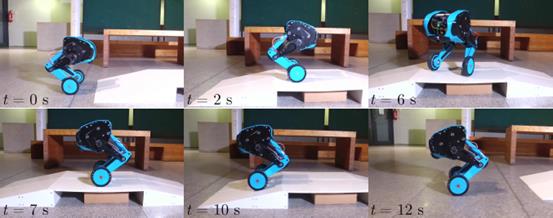
在我们的实验1中,我们再次测试了平衡和转向性能。机器人可以承受来自各个方向的推动。手推机器人一次,它的快照如图4.1所示。在运动方面,该机器人能够执行各种不同的操作,包括快速停止或快速转弯,可以用手动的Xbox游戏手柄控制这些操作。图4.2显示,它甚至设法爬上一个狭窄的坡道,转身再往回走。我们尝试了不同腿长的实验,并获得了不错的结果。但唯独在伸展更多的姿态下,其性能明显较差,无法伺服得很好。
实物机器人的性能在所有方面都超出了我的期望。唯一没有达到最初预期的是轮子打滑。 在轮毂电机达到0.5 Nm的力矩值时,轮子开始打滑,这大大减小了原来得到的±2 Nm轮子电机力矩范围。另一个(尽管是已经预测到的)问题是电机速度和俯仰率测量的噪声很大,这使我们无法使用更快,更激进的控制系统来做优化。这个问题可以之后通过部署UKF或其他滤波技术来解决。
4.2 测量
为了它的完整性起见,我还提供了来自平衡实验和转向实验的测量数据。
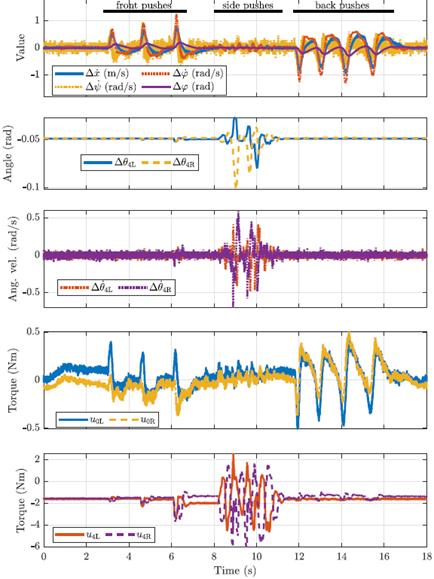
图4.3显示了平衡实验的测量结果。最初,该机器人前面被推了三下,然后从侧面撞了三下,最后背部被推了四下。它的响应与仿真的结果相似。主要区别在于,侧边振荡可快速衰减。这可能是由摩擦引起的。实际上,现实中的摩擦比3D模拟中设定要高得多。身体电机的力矩u4的稳态值不为零,这表明机器人未处于平衡位置。此外,u4的峰值高于仿真中的峰值,但这是由不同的PD控制器参数调整引起的。(微分增益设置低于仿真,因此振荡阻尼不能用不同的调谐来解释。)
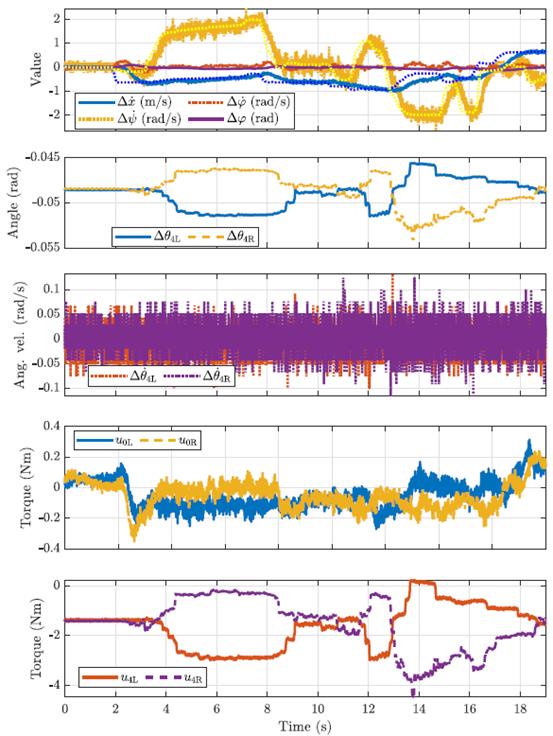
转向实验数据可以从图4.4中看到。机器人以大约一秒钟的延迟去跟踪速度目标值(由深蓝色虚线表示),这与仿真结果相符。Yaw轴角速度(由淡黄色虚线表示)比仿真快,超前约为0.5 s。与仿真结果一致,转弯时发生了腿部重量载荷转移,但在转弯停止时未观察到侧向振动。关于u4峰值和稳态值,与之前的平衡实验相同。
提出的测量结果仅证实了我对上一部分性能的说法。除了侧向振荡外, 该结果与仿真结果相当,而侧向振荡又很快被衰减或压根没有发生。正如我已经提到的,我用摩擦力的差异来解释这一点。
5 结 论
本文的目的,是为我们的双足轮式机器人找到一个基本的仿真和控制工具。特别是要创建3D仿真环境,设计控制系统并基于机器人的平面模型实现跳跃轨迹计算的方法。我相信我已经成功实现了目标。
在第2章中,我推导了机器人的平面模型,事实证明该模型足够精确,并在第3章中将其用于跳跃轨迹的计算和状态观测器的设计。此外,我还介绍了Simulink-Gazebo协同仿真, 将Matlab / Simulink的快速原型设计功能与Gazebo的3D环境仿真工具结合在一起。该3D仿真器是整个论文中的主要验证工具。
第3章介绍了控制系统。由于yaw方向和roll方向动力学的的耦合(译者注:转弯前进的时候yaw角度改变的同时,需要roll方向角度改变来抵消腿部载荷的迁移,改善整个系统的稳定性),所以平面模型对于控制器设计来说是不够的。因此,我切换到两轮倒立摆模型,并使用它设计了具有积分作用的LQR以进行参考跟踪。 结合两个关节电机的PD控制器(2 body PD controllers),LQR可以通过改变腿的长度来稳定和操纵机器人。此外,我设计了一个无迹卡尔曼滤波器,用于估计平面模型的状态。UKF在平衡和直线运动方面效果很好,但是由于平面模型中未建模的3D动力学,转弯时的状态估计值与实际值有所不同。 在本章的最后部分,我介绍了基于优化的跳跃轨迹计算方法。通过仿真实验验证了所获得轨迹的准确性,其中将预先计算的输入值用作前馈控制序列。
我在第4章中描述了使用实物机器人进行的实验。在操纵性方面,所提出的控制器的性能比人们希望的要好,能够快速转动,同时又能快速移动。平衡性能也非常好,因为机器人能够承受各种推动。这些测量结果仅支持这些陈述,并且除了可能由于仿真中不同的摩擦系数的设置引起的未观察到的侧向振荡,测量结果都与仿真结果相符。
5.1 未来的工作
在没有完整3D数学模型的机器人的情况下,只有很少的空间可以改进控制系统。因此,我觉得下一步是其推导。除此之外,跳跃轨迹的计算方法还需要升级。手动调整跳跃滞空的时间是不切实际和耗时的。最后,应该在实物机器人上实验来测试跳跃轨迹。
双足轮开源技术交流QQ群:543613782
参与翻译者:灯哥开源团队、群友Boiling Tears和群友北理双足轮腿
以上是关于双足轮机器人SK8O技术详解--实物机器人的结果结论翻译的主要内容,如果未能解决你的问题,请参考以下文章