中国率先发布全球首份车路协同技术白皮书!清华百度联手,突破自动驾驶规模落地瓶颈...
Posted QbitAl
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了中国率先发布全球首份车路协同技术白皮书!清华百度联手,突破自动驾驶规模落地瓶颈...相关的知识,希望对你有一定的参考价值。
鱼羊 发自 凹非寺
量子位 报道 | 公众号 QbitAI
如果抛出这样一个问题:在自动驾驶领域,中国有啥与众不同?
不少业内人士都会给出这样一个答案:车路协同。
你若尚不了解这是怎样的技术,现在,一份最深入车路协同技术报告来啦!
刚刚,清华大学和百度强强联合,发布了中国首份车路协同技术白皮书《面向自动驾驶的车路协同关键技术与展望》(以下简称白皮书)。
新基建的大背景之下,车路协同这种车载感知+路侧感知,甚至是把整个城市和车辆打通的技术路线,一直以来被视作中国比其他国家更早实现自动驾驶规模落地的关键之一。
正如清华大学讲席教授、智能产业研究院院长张亚勤现场所说:
车路协同不仅是实现智能交通打造交通强国的重要桥梁,更能帮助城市规划建设者做好城市管理、合理规划道路、提升交通效率。

而白皮书从技术的角度出发,首次详细剖析了从单车智能面临的挑战,到车路协同具体如何落地的种种问题。
更值得关注的是,白皮书中还提出了车路协同道路的智能化分级标准。
这也意味着,此番清华和百度释出学术+产业最强战力,不仅是为车路协同的技术创新提供了一份全面的理论综述,还迈出了自动驾驶在中国的发展落地进程中,标准制定的一步。
具体详情,一起来看。
首份车路协同技术白皮书都有啥?
说到自动驾驶,大众更加熟悉的可能是单车智能自动驾驶,也就是车辆依靠自身的视觉能力、毫米波雷达、激光雷达等传感器,来进行环境感知、计算决策和控制执行。
实际上,这一技术路线可以说是自动驾驶的“初级阶段”:在世界范围内最快展开,在行业内有最多玩家关注。
但当自动驾驶经历了这么些年的起起伏伏,已然形成行业共识的一件事是:单靠车辆本身的感知能力来达到高级别的完全无人自动驾驶,需要投入的资金比想象中多,需要的时间比想象中长。
这一清华百度联合发布的技术白皮书就指出:当前全球自动驾驶还处于L2-L3级转化阶段。因前期研发投入大、技术难度高,L3级及以上的高级别自动驾驶商业化进程缓慢,还主要聚集在限定区域应用场景中(如封闭的园区、码头、机场等)。
其中,单车智能自动驾驶经过多年发展,仍然存在的关键问题有:
自动驾驶安全依然面临着巨大挑战
单车感知长尾问题限制了车辆可运行设计域(ODD)
经济性问题(软硬件成本)还未得到充分解决
也就是说,阻碍当前高级别自动驾驶实现商业化规模落地的主要原因,在于当前的单车智能自动驾驶能力,无法找到安全性、应用范围限制和成本之间的平衡点。
为什么自动驾驶规模商业化需要车路协同?
基于车路协同的自动驾驶,恰恰能够更快地攻克上述三个难点。

白皮书指出,首先,基于车路协同的预期功能安全(SOTIF)能提升自动驾驶安全。
以往在极端天气、不利照明、物体遮挡等情况下,单车智能的感知、预测能力都会面临严峻挑战。
而车路协同在单车智能自动驾驶的基础上,能够利用车与车、车与路、车与人之间不同程度的信息交互共享,有效弥补车端感知的不足。
比如,百度Apollo就有这样的实践案例:自动驾驶车辆在路口左转时,有大卡车或公交车挡住了后面的汽车,如果仅仅依靠单车智能,很可能会引发剐蹭事故;但通过车路协同感知,车辆可以获取盲区车辆的运动情况,提前判断,避免车辆急刹或事故的风险。

其次,车路协同能够扩展自动驾驶ODD。
自动驾驶运行设计域(Operational Design Domain)是指自动驾驶系统功能设定的运行条件。
一般而言,受天气、行驶区域、时段、速度等因素限制,单车智能能够感知和应对的驾驶场景有限。
而路侧协同感知可以扩展车辆的感知范围、能力和场景,从而扩展单车的运行设计域,提升自动驾驶的任意点到点能力。
最后,是成本问题。
在系统配置上,单车智能本身感知决策能力的实现,就要依靠昂贵的传感器、算力设备,不仅如此,为了增强安全性,还需要一套等效的冗余子系统。
短期看来,车路协同涉及到基础设施的建设,投入确实比单车智能大,但从长远的角度出发,路侧设备作为公共基础设施,复用率更高,且无需重复建设,能够实现成本分摊。
百度智能交通产品研发总经理陶吉就指出:
车路协同是实现车端冗余/智能化升级更经济的途径。
白皮书也给出了这样的成本计算公式:节约成本(元/车)=[路口数量+路口单价(元/路口)+道路里程+里程单价(元/公里)]/汽车保有量。

可以看到,以北京为例,只要在每辆车上节省2000元成本,就可以在每公里道路上投入约50万元、每个路口投入81.84万元的全部智能化设备升级改造。
简单总结一下,就是在一条智能道路上跑的车辆越多,车路协同技术方案的均摊成本就越低。
另外,依靠来自路侧传感器的感知辅助,车载传感器可以进一步精简,降低车辆本身的成本。
这样看来,在同等自动驾驶安全前提下,相较于单车智能,车路协同就可以更快、更大范围地实施部署,降低自动驾驶规模商业化的门槛。
因此,白皮书认为,车路协同自动驾驶是单车智能自动驾驶的高级发展形势,通过车联网将“人-车-路-云”等交通参与要素有机地联系在一起,能快速补齐单车智能的短板,突破目前自动驾驶所遇到的技术瓶颈,加速自动驾驶技术规模落地。
自动驾驶有分级,智能道路也需要
说完了车路协同的好处,自然也要正视其存在的问题。
核心依然在道路本身。

简单来说,一方面,车越智能,对道路的智能化要求就越低;而L2、L3级别的车辆想要实现更稳定的自动驾驶能力,就需要更高等级的智能道路来进行辅助。
另一方面,国内道路千千万万条,单高速公路里程就达到了16.10万公里。道路自身条件不同,对于智能化的需求也就不同,不能粗暴地按照单一的标准去进行智能化改造。
因此,对道路本身进行智能化分级,已经到了箭在弦上不得不发的时候。
在白皮书中,清华AIR和百度就对国内道路现状进行了智能化分级,将道路智能化水平分为C0-C5级6个等级。
道路智能化等级越高,对车辆智能化要求越低,覆盖的智能汽车等级范围就越广。
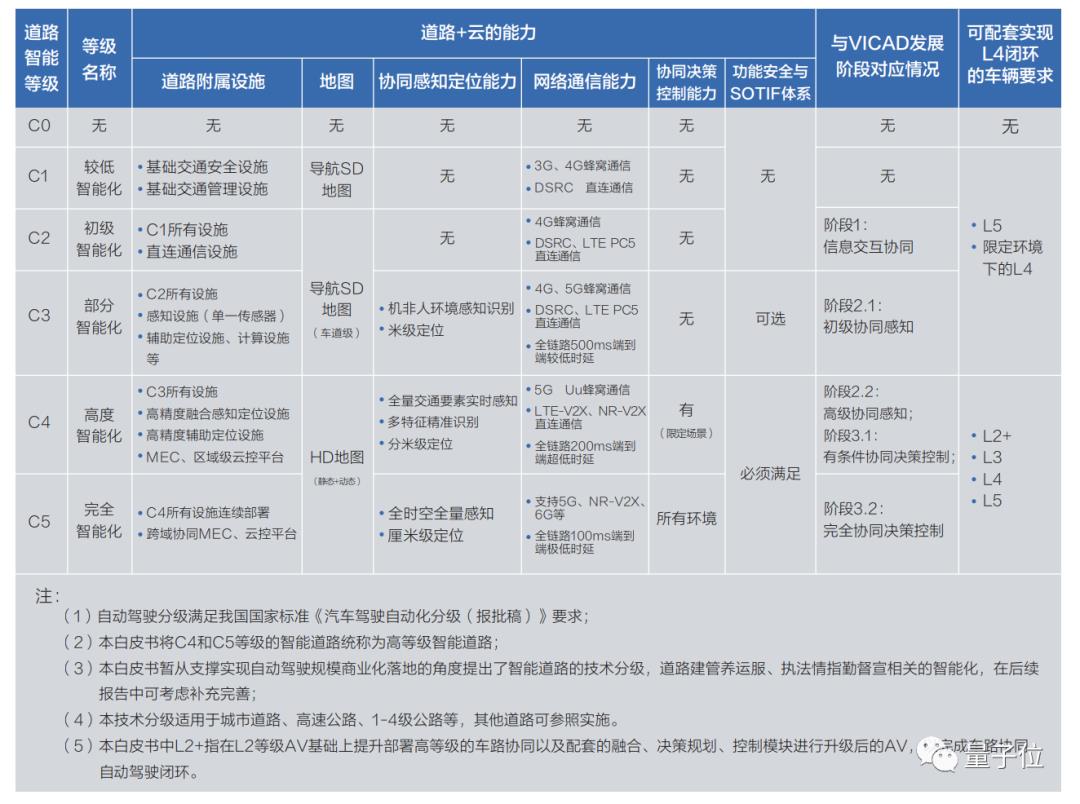
举一个简单的例子,原本想要达到完全无人驾驶,需要无人车达到L4级及以上的标准——这种高级别自动驾驶技术目前仅掌握在少数自动驾驶玩家手中,技术难度较大,也尚处在限定区域测试阶段。
但如果有了C4、C5级的智能道路,即使是L2+(指在L2级别辅助驾驶的基础上添加车路协同的能力)、L3级别的较低级别自动驾驶车辆,也能够在不对车辆本身进行改造的情况下,将其自动驾驶能力提升到L4级别。
相比于Waymo迟迟难以商业化的“一步跨到L4级”路线,这无疑能让真正的自动驾驶更快进入到人们的日常生活中。而相比特斯拉边发布尚不成熟的技术、边收集数据快速迭代的路线,车路协同的安全性就高得多了。
另外值得关注的是,就像L5级自动驾驶是单车智能的最高目标,C5级完全智能化道路当然也是智能道路的最终追求,但在现在这个阶段,白皮书建议重点加快C4级高度智能化道路的建设。
首先,与低级智能道路相比,C4级道路覆盖的范围囊括L2+到L5,与当前自动驾驶的发展阶段更加匹配,能让L2+、L3级辅助驾驶车辆具备高级自动驾驶能力,促进自动驾驶规模商业化落地。
其次,与更高等级的智能道路相比,C4的投入成本更低,但能达到相同的效果。
更重要的是,C4、C5都属于高级智能化道路,除了服务自动驾驶之外,还能和城市整体打通,提升城市智能交通管理能力,有效提高出行效率。
而通过充分发挥出智能道路的全要素高精度感知能力、车路云一体化智能管控和服务能力,探索开展出的更多创新应用和创新服务,既能服务于未来人们的智慧生活,加快新型智慧城市建设,亦能助力交通强国这一宏伟目标的实现。

可以说是既面向未来——满足自动驾驶规模商业化落地的发展需求,同时也兼容当下——降维解决低等级自动驾驶和车联网的发展需求,支撑开展智能交通管理、智慧出行服务,支撑开展新型智慧城市建设。
车路协同是中国自动驾驶的“换道超车”机会
说完技术,谈罢标准,白皮书再次强调车路协同、建设高等级智能道路这一“中国方案”对自动驾驶在中国快速规模化落地的意义。
中国作为“基建狂魔”,具有强大的全局统筹能力,在战略政策层面还有新基建的全面助力,因此在推行车路协同自动驾驶这一技术路线时,拥有独一份的先天优势。
在单车智能领域,我国与美国仍存在一定差距,同时由于我国路况设施更为复杂,存在自动驾驶规模落地“最后1%的问题”。
但同时,无论是在汽车智能化、5G,还是在互联网和通信产业方面,从产业协同的层面来看,中国已经具备了引领创新的条件。
综合考量之下,将车路协同作为发展智能交通、无人驾驶的杠杆着力点,重点发展车路协同,有助于中国自动驾驶实现换道超车。
综合来看,全球智能网联、自动驾驶与超车路协同的技术研究、测试示范、法规标准制定总体处于探索和起步阶段,我国基本处在第一阵营地位,完全有机会充分发挥自身的体制机制优势、战略政策优势、技术产业优势,建设高等级智能道路,发展车路协同自动驾驶,引领自动驾驶快速规模化落地。
为什么是清华百度来推动标准的完善?
制定标准,是技术高速发展之后的必经之路。
那么,在这个时间节点,为什么是清华和百度出手推动了这么一件事?
无疑,清华大学代表了国内学术研究的最高水平。清华大学智能产业研究院(AIR)更是云集人工智能学术界、产业界大牛:张亚勤、赵峰、马维英、刘洋、陶大程、周谷越、聂再清……

这些专家大拿不仅有深厚的学术背景,更对人工智能产业有着长期、深入的观察。
至于百度Apollo,代表的则是国内自动驾驶产业落地的“最快速度”。
从技术上来说,百度早在8年前就开始布局自动驾驶,甚至被称作中国自动驾驶的“黄埔军校”,技术实力不可谓不深厚。

截至目前,Apollo已经拿到超过244张自动驾驶测试牌照,累计测试里程超过1200万公里。无论是路测里程、接管数据,还是牌照发放进展,都与谷歌的Waymo、通用的Cruise跨洋辉映,形成全球三足鼎立之势。
更重要的是,与众多专注于单车智能的初创企业不同,百度Apollo可以说是最早布局单车智能+车路协同,提出“两条腿走路”的自动驾驶厂商之一。
在车路协同的探索方面,百度一直以来都躬耕在一线:
早在2018年9月,百度就根据国内的实际路况、当前全球的自动驾驶技术水平,宣布进军车路协同,并完成了路口原型验证。
2019年,百度Apollo在开放道路智能驾驶长沙示范区,结合V2X技术,推出了中国首个面向普通民众的Robotaxi试运营服务。
2020年4月,百度正式对外发布全球首个车路智行融合的全栈式智能交通解决方案“ACE智能交通引擎”,并很快在全国近二十个城市实现落地。
比如,在广州黄埔区,Apollo就开启了“数字交通运营商”模式。在部署自动驾驶出租车、自动驾驶公交、自动驾驶巡检及自动驾驶作业车等车队的同时,通过AI路侧感知体系和云端引擎,也为普通车用户提供了高精度实时道路信息等网联化服务,实现了绣花级数字化路口。

同年12月,Apollo 6.0开源重大升级,百度开始对外部开放自身车路协同技术能力和相关标准。
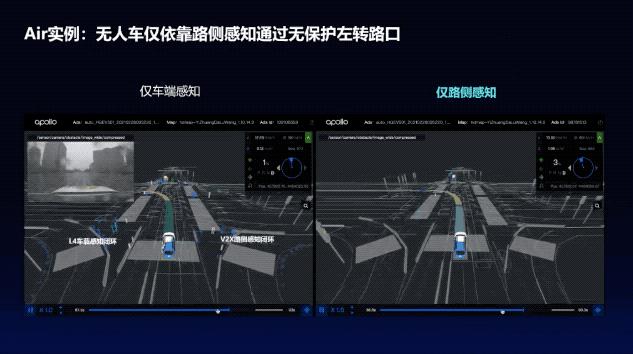
今年5月,清华和百度还联合发布了“全球唯一纯路侧感知实现L4自动驾驶闭环”的车路协同技术Apollo Air计划,挑战车路协同最高难度技术难度,对路侧感知和云端设备进行“压力测试”。
同济大学汽车安全技术研究所所长朱西产就表示:
车路协同带来至少三个行业的协同:通讯、交通、汽车。如果不能达成共识,不能互联互通,就很难做到车路协同。
让各个行业达成共识,这是白皮书的作用。百度是自动驾驶领域技术能力最强的公司,清华大学则是车路云一体的网联智能在中国最早的提出者和践行者。由清华大学和百度联合提出这个白皮书,一是让全行业达成共识,二是给政府部门出谋划策。
事实上,中国的路况在世界范围内都属于比较复杂的范畴,想要让自动驾驶技术能在中国更快规模落地,同时也给无人车再上一道安全保险,“单车智能+车路协同”的技术方案被业内人士普遍认为是最优解。
同时,在新基建这个大背景的支持之下,这也是只有中国能够最快着手实践的一条技术路线。
而在学术界、产业界不断实践、突破之后,这样一份汇集学术、产业最强战力的车路协同技术白皮书的出炉,意味着在自动驾驶的商业化落地进程中,中国已经率先走到了标准制定的阶段——这在此前的技术革命和浪潮中,是十分罕见的。
由此看来,自动驾驶在中国的规模化落地,或许会比想象中来得更快。
你觉得呢?
最后,如果想阅读白皮书全文,请点击“阅读原文”~
以上是关于中国率先发布全球首份车路协同技术白皮书!清华百度联手,突破自动驾驶规模落地瓶颈...的主要内容,如果未能解决你的问题,请参考以下文章