STC89C52RC单片机额外篇 | 07 - 使用Keil搭建与管理项目式多文件工程
Posted Neutionwei
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了STC89C52RC单片机额外篇 | 07 - 使用Keil搭建与管理项目式多文件工程相关的知识,希望对你有一定的参考价值。
1 单一式与项目式工程对比
新建一个Keil工程,初学者一般都会新建一个文件夹,然后将每个涉及到的.c与.h文件,还有keil的输出文件都一下放在这个文件夹里,如下图:

图中有我们自己建立的.c与.h文件以外,那些没有图标的就是Keil输出的一些文件,当然也包括我们要的.hex文件,这样看起来就会感觉乱乱的。
我们再看看下面这个文件夹:



在这个工程下分别建立了以下文件夹:
- include:用来存放我们头文件
.h。 - output:用来存放Keil输出的一些文件。
- source:用来存放
.c的一些源码。 - utility:是用来存放一些通用的工具,比如将hex转为bin二进制文件。
其他的是一些工程文件。(这里的hex、bin文件是通过utility里面的一些工具生成,将在后面讲解)。
看得出来与上一个图比起来是不是稍微有点层次感,清析一点了,(这两个比较并不是很明显,是因为这个工程是比较小的,如果是再多一点的话我相信肯定是很明显的)。
下面博主带领大家逐步使用Keil搭建与管理项目式多文件工程,案例使用上一节模块化编程后的数字温度计程序,不清楚的建议先看这篇:
《STC89C52RC单片机额外篇 | 06 - 认识高内聚、低耦合的模块化编程》。
2 项目式工程建立
① 为当前的工程建立一个名为thermometer的文件夹。
② 在thermometer这个目录下分别建个source、include、output、utility四个文件夹(当然也可以在建立工程的时候,临时建立)。

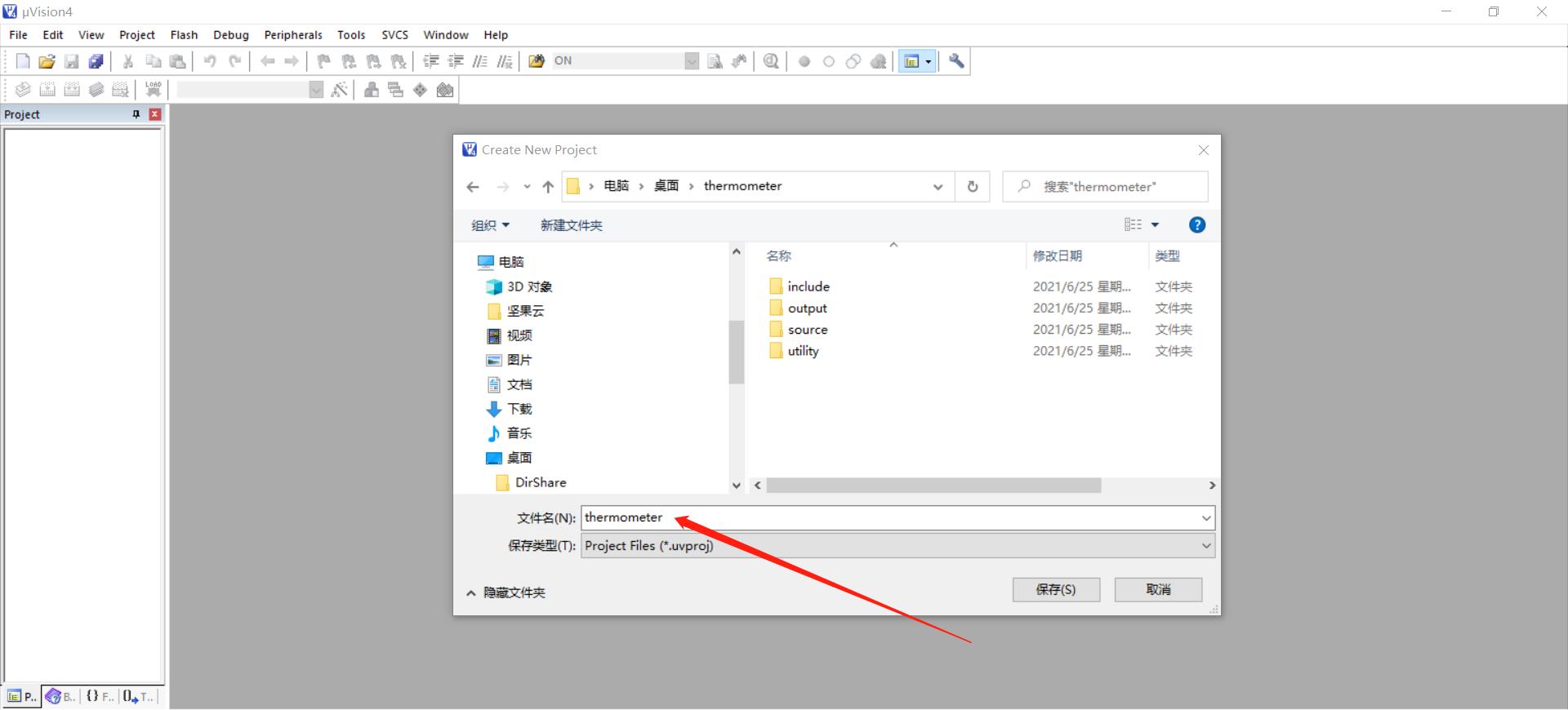
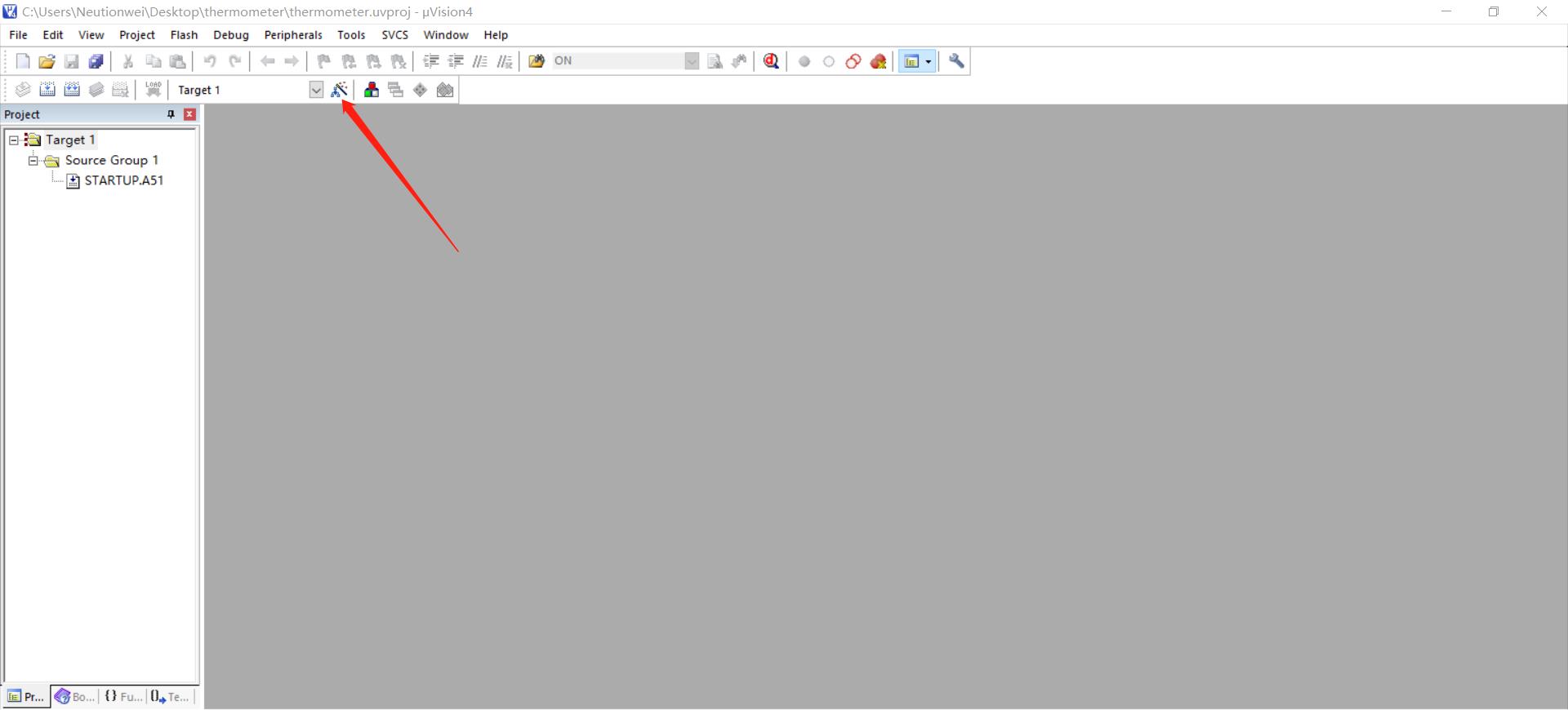
③ 打开Keil新建一个工程名为thermometer的工程。

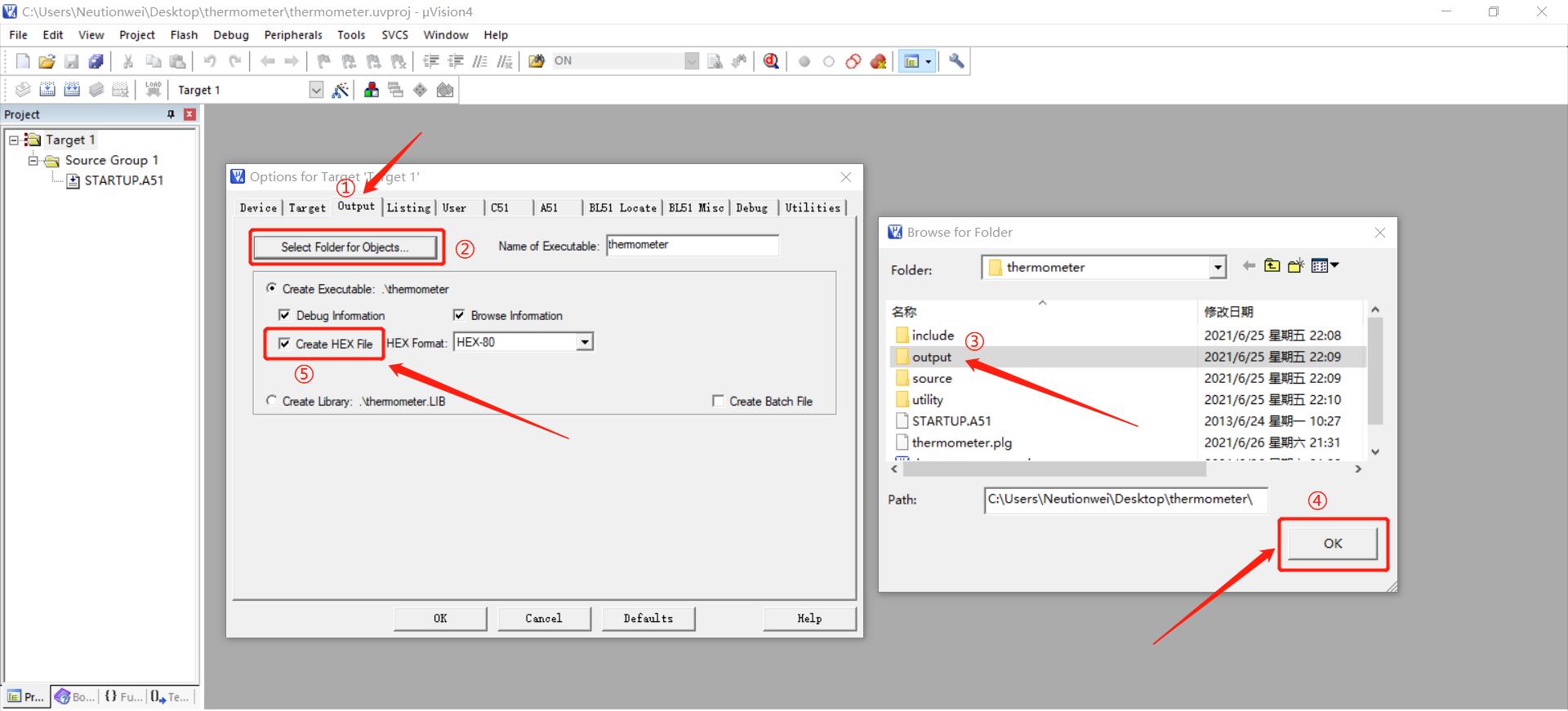
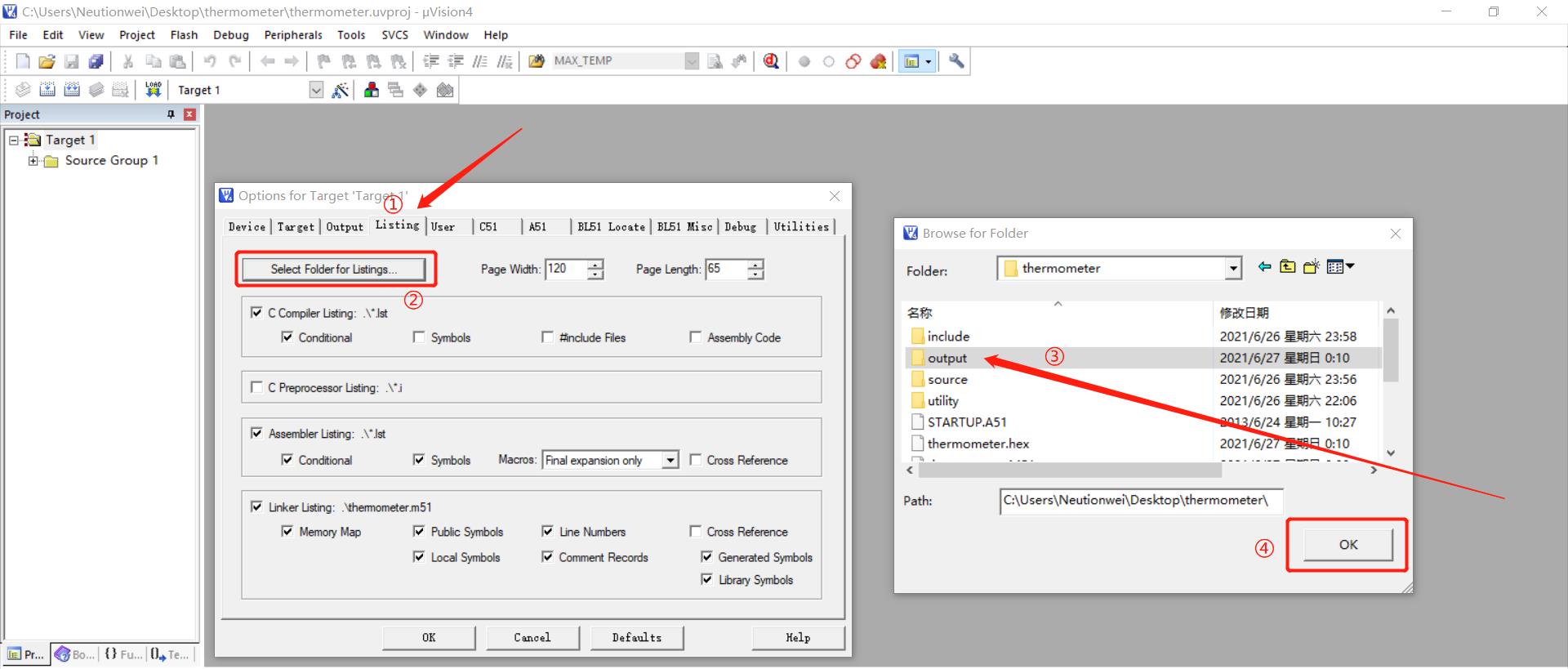
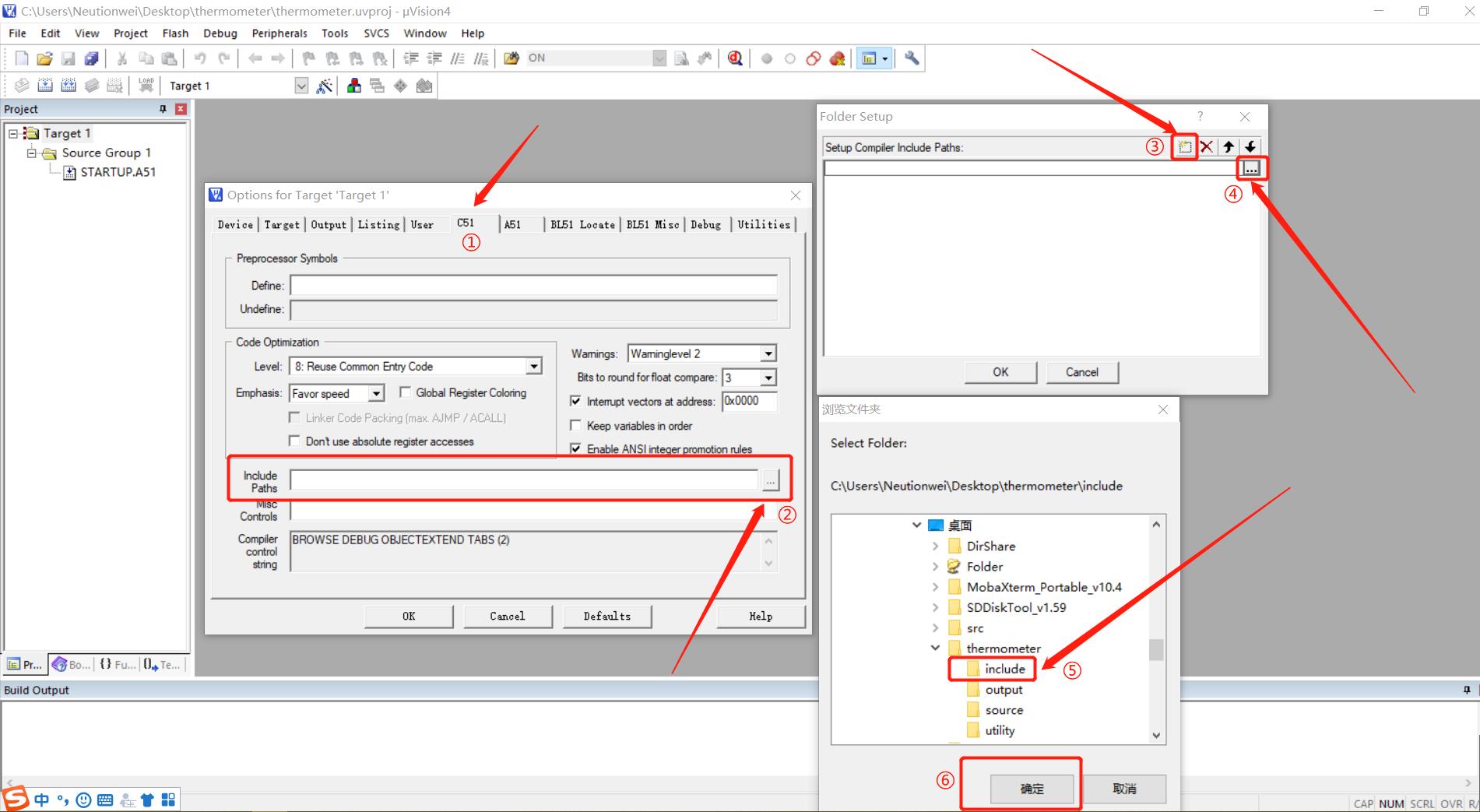
④ 指定Keil的输出文件夹。
⑤ 指定.h头文件的所在目录。
到目前为止,我们已经完成了Keil的层次管理!
⑥ 咦,不是还有一个utility目录吗?聪明的你会发现utility里面的东西我们并没有说到,其实这里存放的是些通用的附加的功能,很方便很实用的。
前面我们指定了output文件夹为了输出Keil编译时的输出文件,hex文件也是输出文件,也就在这里面,但是由于Keil编译时的中间输出文件还是蛮多的,
要到里面找hex文件还是有点小麻烦的,怎么办呢,这时utility下的小工具就派上用场了。
我们可以往这个目录写一个拷贝hex文件的脚本:
A、首先在utility目录下新建一个copy_hex.bat的文件。

B、右键以记事本打开这个批处理文件,往里面写入以下内容。
copy .\\output\\thermometer.hex thermometer.hex
脚本意思就是将.\\目录下output文件夹里面的thermometer.hex文件复制到.\\目录下,这样我们就可以在工程目录下一眼就看到hex文件啦!
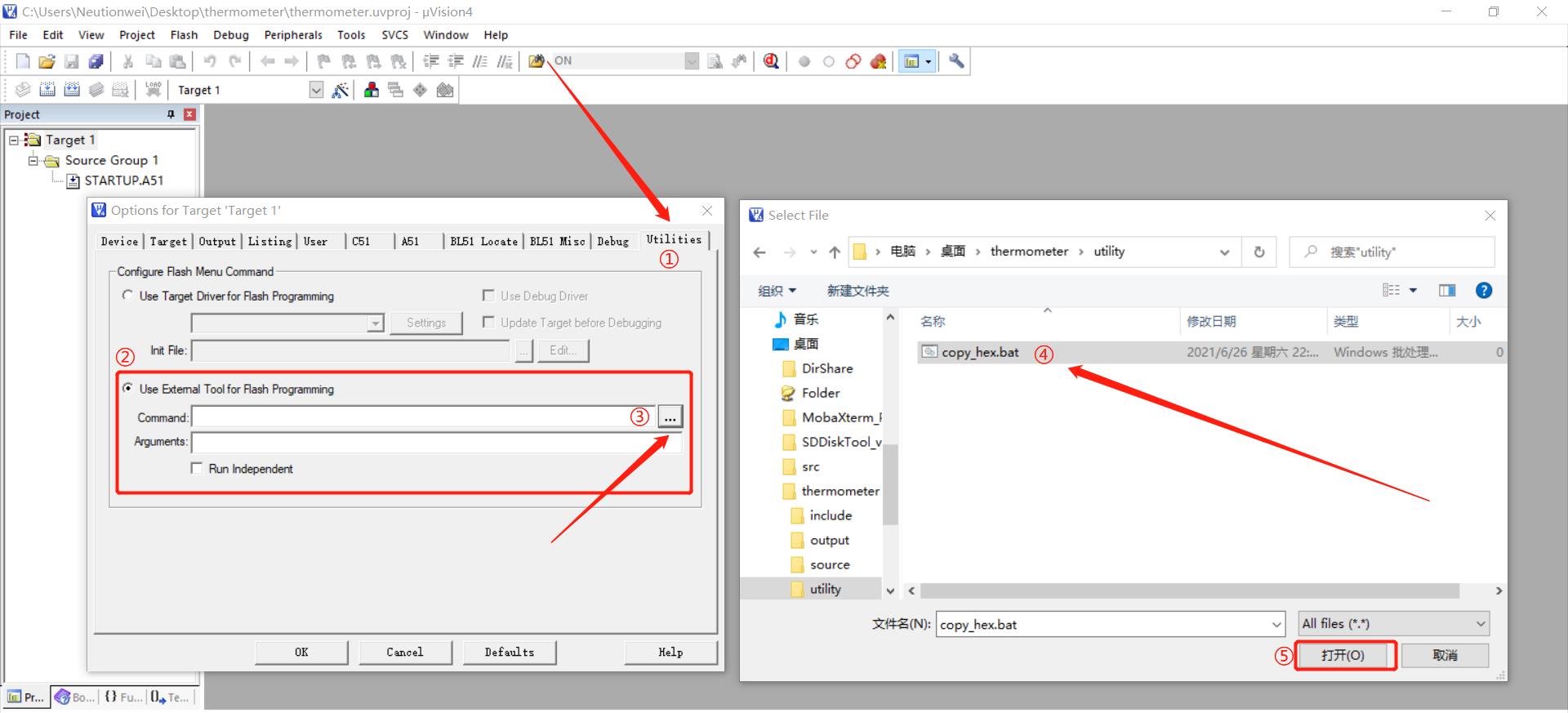
C、在Keil工程中指定utility目录。
3 多文件管理
这里引用上一节模块化编程后的数字温度计程序,不清楚的建议先看这篇:
《STC89C52RC单片机额外篇 | 06 - 认识高内聚、低耦合的模块化编程》
程序如下:
//*****************************头文件声明****************************
#include <reg51.h>
//****************************数据类型定义***************************
typedef unsigned char uint8;
typedef unsigned int uint16;
//***************************温度报警值定义**************************
#define MAX_TEMP 0x01F8 // 31.5℃
//****************************I/O口线声明****************************
#define SEG_CODE_PORT P0
#define BIT_CODE_PORT P2
sbit DS18B20_DATA=P3^7;
sbit BUZZ=P1^0;
//************************常量数组(段码表)声明*********************
uint8 code SegCodeTable[]=
{0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90};
//****************************函数原型声明***************************
void DS18B20Init();
void DS18B20BitWrite(bit Bit);
bit DS18B20BitRead();
void DS18B20ByteWrite(uint8 Byte);
uint8 DS18B20ByteRead();
void GetTemperature(int *temperature);
void DispTemperature(int temperature);
void Delay(uint16 ms);
void AlarmCheck(int temperature, int max_temperature);
//*******************************主函数******************************
void main()
{
int temperature = 0;
while(1)
{
GetTemperature(&temperature); //采集当前温度
DispTemperature(temperature); //显示当前温度
AlarmCheck(temperature, MAX_TEMP); //判断温度是否超过31.5℃
}
}
//*************************DS18B20初始化函数*************************
void DS18B20Init()
{
uint16 i;
while(1)
{
DS18B20_DATA=0;
i=640;
while(--i); //延时800us(STC12C5A60S2,11.0592MHz,代码5级优化)
DS18B20_DATA=1;
i=56;
while(--i); //延时70us
if(DS18B20_DATA==1) continue; //无响应则重发复位脉冲
i=224;
while(--i); //延时280us
if(DS18B20_DATA==1) break; //复位成功
}
i=160;
while(--i); //延时200us
}
//***********************DS18B20位写操作函数*************************
void DS18B20BitWrite(bit Bit)
{
uint16 i;
DS18B20_DATA=0;
i=4;
while(--i); //延时5us
DS18B20_DATA=Bit; //发送1位数到DS18B20
i=48;
while(--i); //延时60us
DS18B20_DATA=1;
}
//**********************DS18B20位读操作函数**************************
bit DS18B20BitRead()
{
bit temp;
uint16 i;
DS18B20_DATA=0;
i=4;
while(--i); //延时5us
DS18B20_DATA=1;
i=4;
while(--i); //延时5us
temp=DS18B20_DATA; //读来自DS18B20的1位数
i=48;
while(--i); //延时60us
return temp;
}
//**********************DS18B20字节写操作函数************************
void DS18B20ByteWrite(uint8 Byte)
{
uint8 i;
for(i=0;i<8;i++) //一共发送8位
{
if( Byte&0x01==1 ) //先发最低位
DS18B20BitWrite(1); //发送1
else
DS18B20BitWrite(0); //发送0
Byte>>=1;
}
}
//**********************DS18B20字节读操作函数************************
uint8 DS18B20ByteRead()
{
uint8 i,temp=0;
for(i=0;i<8;i++) //一共读8位
{
temp>>=1; //字节变量右移
if(DS18B20BitRead()==1) //读取1位数据并存入临时变量temp中
temp|=0x80; //temp最高位置1
}
return temp; //返回读到的8位数
}
//*************************DS18B20温度转换函数***********************
void DS18B20Conversion()
{
DS18B20Init(); //DS18B20初始化
DS18B20ByteWrite(0xCC); //跳过ROM匹配(因为只有一个DS18B20)
DS18B20ByteWrite(0x44); //启动温度转换
}
//*************************DS18B20温度读取函数***********************
void DS18B20Read(uint8 buff[])
{
DS18B20Init(); //DS18B20初始化
DS18B20ByteWrite(0xCC); //跳过ROM匹配(因为只有一个DS18B20)
DS18B20ByteWrite(0xbe); //准备读转换结果
buff[0]=DS18B20ByteRead(); //读温度值低字节
buff[1]=DS18B20ByteRead(); //读温度值高字节
}
//*****************************温度采集函数**************************
void GetTemperature(int *temperature)
{
uint8 Buff[2],i;
DS18B20Conversion(); // 启动DS18B20温度转换
for(i=0;i<250;i++)
DispTemperature(*temperature); // 等待750ms,期间不断刷新LED显示
DS18B20Read(Buff); // 读取DS18B20温度数据
*temperature=(Buff[1]<<8)+Buff[0]; //拼成16位温度值
}
//******************************温度显示函数*************************
void DispTemperature(int temperature)
{
uint8 temp;
temp=(temperature>>4)/10; //显示十位
if(temp==0)
SEG_CODE_PORT=0xFF ; //十位为0则隐去
else
SEG_CODE_PORT=SegCodeTable[temp];
BIT_CODE_PORT=0xF5; //选择显示位置
Delay(1);
BIT_CODE_PORT=0xFF;
SEG_CODE_PORT=SegCodeTable[(temperature>>4)%10]&0x7F; //显示个位(带点)
BIT_CODE_PORT=0xF6; //选择显示位置
Delay(1);
BIT_CODE_PORT=0xFF;
SEG_CODE_PORT=SegCodeTable[(temperature&0x0F)*10/16]; //显示十分位
BIT_CODE_PORT=0xF7; //选择显示位置
Delay(1);
BIT_CODE_PORT=0xFF;
}
//******************************蜂鸣器发声函数***************************//
void BuzzerSounds()
{
uint8 i;
for(i=0;i<50;i++)
{
BUZZ=~ BUZZ ;
Delay(1); //控制无源蜂鸣器发声50ms
}
BUZZ=1;
Delay(100);
}
//********************************超温报警函数***************************//
void AlarmCheck(int temperature, int max_temperature)
{
if(temperature > max_temperature)
{
BuzzerSounds(); // 蜂鸣器发声
}
}
//******************************软件延时函数*************************
void Delay(uint16 ms)
{
uint16 i;
do{
i=790;
while(--i); //延时1ms(STC12C5A60S2,11.0592MHz,代码5级优化)
} while(--ms);
}
针对这个数字温度计程序,我们可以把整个程序放到以下几个.c源文件中:
- main.c:处理用户需求
- delay.c:软件延时
- ds18b20.c:DS18B20驱动
- buzzer.c:蜂鸣器驱动
- seg.c:数码管驱动
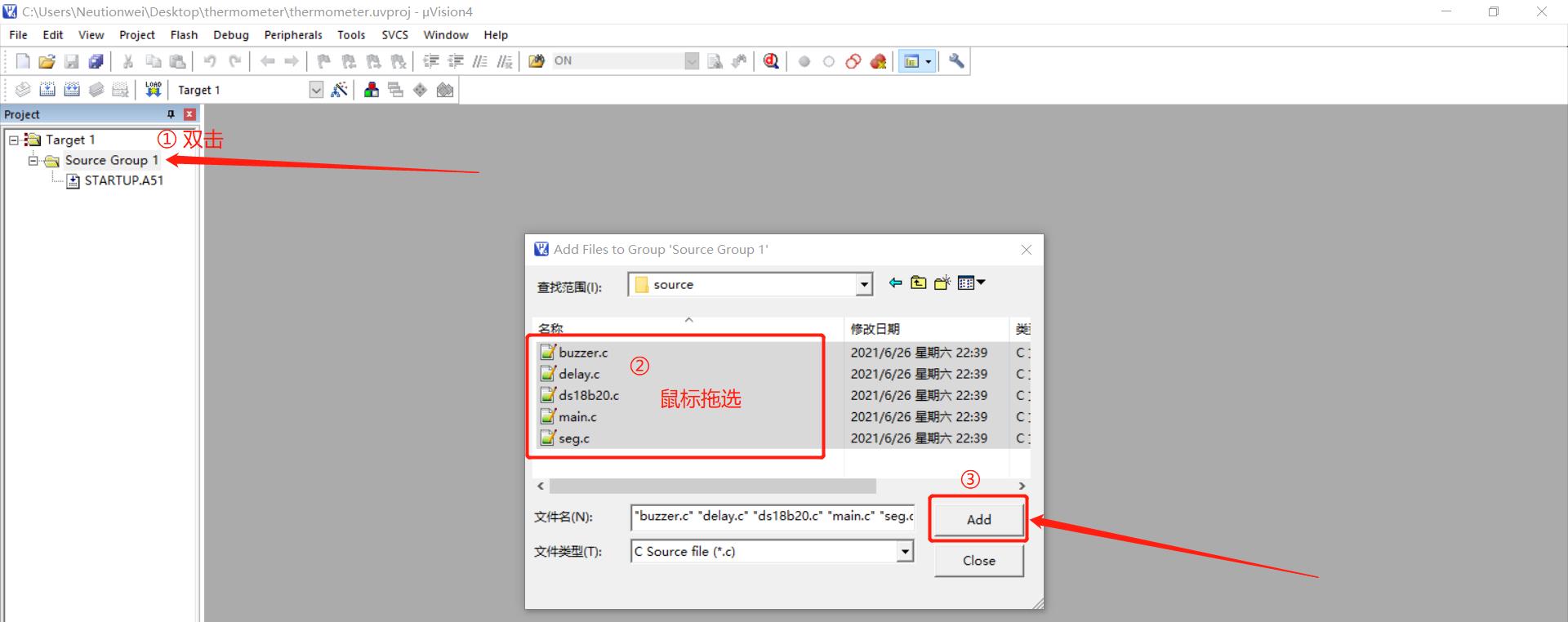
在source目录下新建这五个源文件:

把它们添加到Keil工程中:
下面我们按照我们的编程逻辑分别对各个源文件的程序进行部署。
① 打开main.c函数,添加原始程序框架:
//*****************************头文件声明****************************
#include <reg51.h>
//*******************************主函数******************************
void main()
{
}
② 新建一个typedef.h定义数据类型:
在main.c中包含这个头文件:
然后点击编译,之后右键选择 Open document “typedef.h” 打开头文件,添加以下内容:
#ifndef _TYPEDEF_H
#define _TYPEDEF_H
//****************************数据类型定义***************************
typedef unsigned char uint8;
typedef unsigned int uint16;
#endif
③ 新建一个port.h定义单片机端口,添加以下内容:
#ifndef _PORT_H
#define _PORT_H
#include <reg51.h>
//****************************I/O口线声明****************************
#define SEG_CODE_PORT P0
#define BIT_CODE_PORT P2
sbit DS18B20_DATA=P3^7;
sbit BUZZ=P1^0;
#endif
④ 新建一个ds18b20.h添加DS18B20模块的函数声明:
#ifndef _DS18B20_H
#define _DS18B20_H
void DS18B20Init();
void DS18B20BitWrite(bit Bit);
bit DS18B20BitRead();
void DS18B20ByteWrite(uint8 Byte);
uint8 DS18B20ByteRead();
void DS18B20Conversion();
void DS18B20Read(uint8 buff[]);
#endif
⑤ 打开ds18b20.c文件,添加以下内容:
#include "typedef.h"
#include "port.h"
#include "ds18b20.h"
//*************************DS18B20初始化函数*************************
void DS18B20Init()
{
uint16 i;
while(1)
{
DS18B20_DATA=0;
i=640;
while(--i); //延时800us(STC12C5A60S2,11.0592MHz,代码5级优化)
DS18B20_DATA=1;
i=56;
while(--i); //延时70us
if(DS18B20_DATA==1) continue; //无响应则重发复位脉冲
i=224;
while(--i); //延时280us
if(DS18B20_DATA==1) break; //复位成功
}
i=160;
while(--i); //延时200us
}
//***********************DS18B20位写操作函数*************************
void DS18B20BitWrite(bit Bit)
{
uint16 i;
DS18B20_DATA=0;
i=4;
while(--i); //延时5us
DS18B20_DATA=Bit; //发送1位数到DS18B20
i=48;
while(--i); //延时60us
DS18B20_DATA=1;
}
//**********************DS18B20位读操作函数**************************
bit DS18B20BitRead()
{
bit temp;
uint16 i;
DS18B20_DATA=0;
i=4;
while(--i); //延时5us
DS18B20_DATA=1;
i=4;
while(--i); //延时5us
temp=DS18B20_DATA; //读来自DS18B20的1位数
i=48;
while(--i); //延时60us
return temp;
}
//**********************DS18B20字节写操作函数************************
void DS18B20ByteWrite(uint8 Byte)
{
uint8 i;
for(i=0;i<8;i++) //一共发送8位
{
if( Byte&0x01==1 ) //先发最低位
DS18B20BitWrite(1); //发送1
else
DS18B20BitWrite(0); //发送0
Byte>>=1;
}
}
//**********************DS18B20字节读操作函数************************
uint8 DS18B20ByteRead()
{
uint8 i,temp=0;
for(i=0;i<8;i++) //一共读8位
{
temp>>=1; //字节变量右移
if(DS18B20BitRead()==1) //读取1位数据并存入临时变量temp中
temp|=0x80; //temp最高位置1
}
return temp; //返回读到的8位数
}
//*************************DS18B20温度转换函数***********************
void DS18B20Conversion()
{
DS18B20Init(); //DS18B20初始化
DS18B20ByteWrite(0xCC); //跳过ROM匹配(因为只有一个DS18B20)
DS18B20ByteWrite(0x44); //启动温度转换
}
//*************************DS18B20温度读取函数***********************
void DS18B20Read(uint8 buff[])
{
DS18B20Init(); //DS18B20初始化
DS18B20ByteWrite(0xCC); //跳过ROM匹配(因为只有一个DS18B20)
DS18B20ByteWrite(0xbe); //准备读转换结果
buff[0]=DS18B20ByteRead(); //读温度值低字节
buff[1]=DS18B20ByteRead(); //读温度值高字节
}
⑥ 新建一个delay.h添加软件延时的函数声明:
#ifndef _DELAY_H
#define _DELAY_H
#include "typedef.h"
void Delay(uint16 ms);
#endif
⑦ 打开delay.c文件,添加以下内容:
#include "delay.h"
//******************************软件延时函数*************************
void Delay(uint16 ms)
{
uint16 i;
do{
i=790;
while(--i); //延时1ms(STC12C5A60S2,11.0592MHz,代码5级优化)
} while(--ms);
}
⑧ 新建一个buzzer.h添加BuzzerSounds的函数声明:
#ifndef _BUZZER_H
#define _BUZZER_H
#include "typedef.h"
void BuzzerSounds();
#endif
⑨ 打开buzzer.c文件,添加以下内容:
#include "port.h"
#include "delay.h"
#include "buzzer.h"
//******************************蜂鸣器发声函数***************************//
void BuzzerSounds()
{
uint8 i;
for(i=0;i<50;i++)
{
BUZZ=~ BUZZ ;
Delay(1); //控制无源蜂鸣器发声50ms
}
BUZZ=