ESP32 单片机学习笔记 - 04 - ADC和定时器
Posted L建豪 忄YH
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ESP32 单片机学习笔记 - 04 - ADC和定时器相关的知识,希望对你有一定的参考价值。
ESP32 单片机学习笔记 - 04 - ADC和定时器
一、模拟数字转换器 ADC
编程指南:Analog to Digital Converter。
数据手册: ESP32 技术参考手册 (PDF),第二十九章的:片上传感器与模拟信号处理,官方将adc、dac、触摸按键、内部霍尔传感器都归为一类了。之后有需求就都学一下,现在就看看adc怎么用的先。
官方例程:perials /adc/single_read。
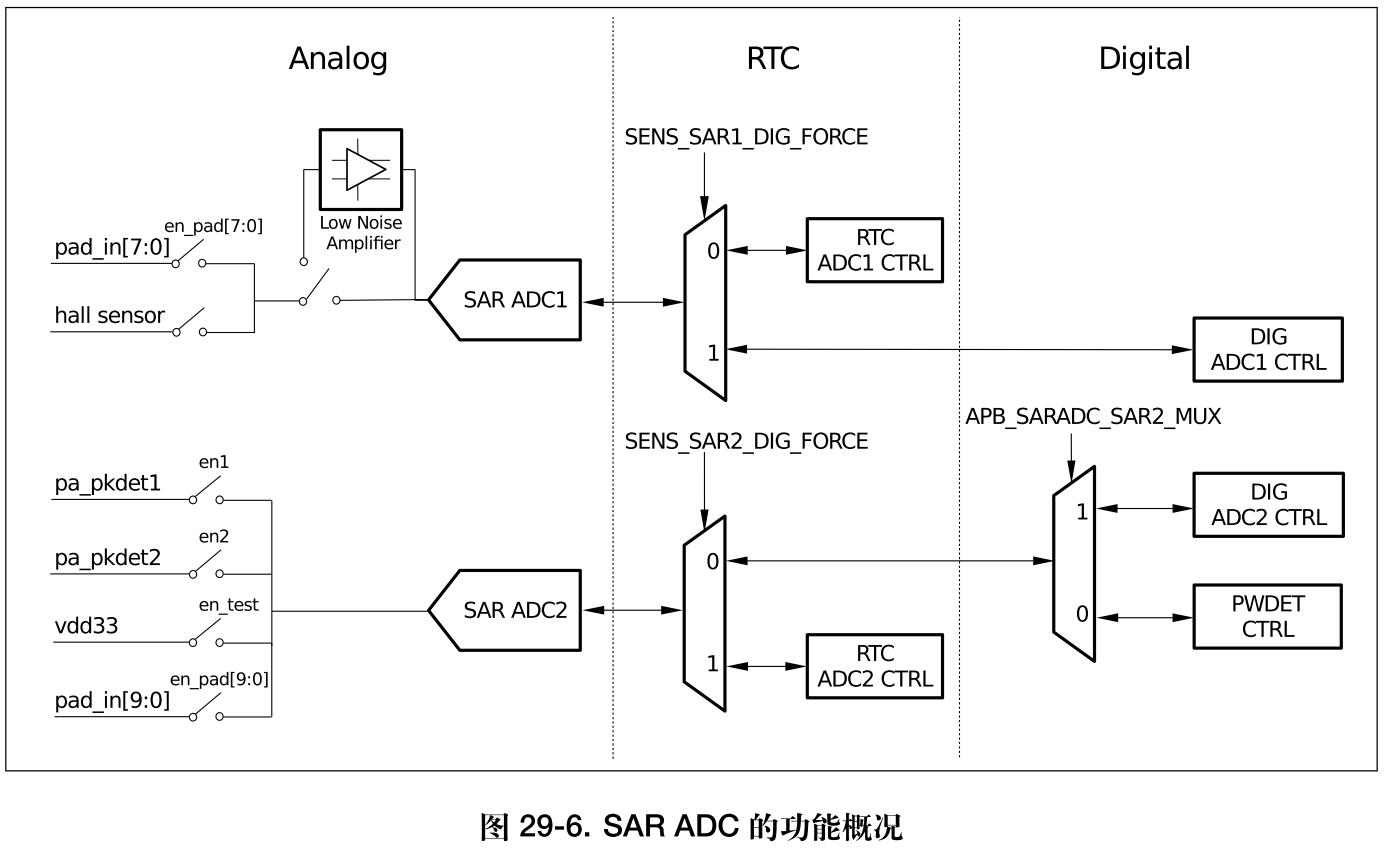
- 简介:ESP32 内置了 2 个 12 位的 SAR ADC,由 5 个专用转换器控制器管理,可测量来自 18 个管脚的模拟信号,还可测量 vdd33 等内部信号。SAR ADC 使用的 5 个控制器均为专用控制器,其中 2 个支持高性能多通道扫描、2 个经过优化可支持Deep-sleep 模式下的低功耗运行,另外 1 个专门用于 PWDET / PKDET (功率检测和峰值监测)。SAR ADC 的功能概况见图。(手册里表明了有哪些引脚,编程指南还标明了建议使用那些引脚)
- 技术手册上已说明,ADC只有2个单元(好像不能称为2个单元了,应该是一个单元2个模块多个通道),而且是只能检测规定的18个引脚(其中有部分还被占用了),另外还可以检测内部信号。
- 每个ADC单元支持两种工作模式,ADC单读模式和ADC连续(DMA)模式。ADC单读模式适用于低频采样操作。ADC连续(DMA)读模式适用于高频连续采样动作。
- 从一个没有连接到任何信号的引脚读取ADC是随机的。应该在读取之前配置ADC。注意
ADC1/2的配置方式是不一样的。
- 对于ADC1,可以通过调用
adc1_config_width()和adc1_config_channel_atten()函数来配置所需的精度和衰减。 - 对于ADC2,通过
adc2_config_channel_atten()配置衰减。ADC2的读数宽度在每次读取时进行配置。 - 配置引脚时是使用专门的枚举定义,而不是像之前那样填写可随意改动的引脚号:衰减配置是对每个通道进行的,参见
adc1_channel_t和adc2_channel_t,设置为上述函数的参数。
在api手册中可以查到
adcn_config_channel_atten()的注释:默认ADC电压用于衰减0 dB,在下表中列出。通过设置更高的衰减,可以读取更高的电压。由于ADC的特性,最准确的结果是在下表中显示的“建议范围”内获得的。每种不同的衰减对应电压是(800mV、1100mV、1350mV、2600mV),居然量程范围是小于3.3V的吗?
而adc1_config_width()的注释为:配置ADC1捕获宽度,同时使能ADC1的输出反转。该配置适用于ADC1的所有通道。(参数可以设置为9、10、11、12位)
- 然后可以使用
adc1_get_raw()和adc2_get_raw()读取ADC转换结果。ADC2的读取宽度应该设置为adc2_get_raw()的一个参数,而不是在配置函数中!!!
- 这个API提供了一种方便的方式来配置ADC1从ULP读取数据。为此,调用函数
adc1_ulp_enable(),然后按上面讨论的那样设置精度和衰减。
还有另一个特定函数
adc_vref_to_gpio()用于将内部参考电压路由到GPIO引脚。它方便校准ADC读数,这将在最小化噪声部分讨论。关于使用ADC单读模式的限制,请参阅ADC的限制。
1) 应用代码
不知道为什么我自己的工程编译时显示找不到头文件"esp_adc_cal.h"……
- 编程指南给出简单的几行代码,就可以实现ADC读取的功能。(例程里相对好长)
#include "driver/adc.h"
// #include "esp_adc_cal.h" // 为什么找不到啊
/*
下述示例中的输入电压从0到1.1 V (0 dB衰减)。
输入范围可以通过设置更高的衰减来扩展,参见adc_atten_t。
使用包括校准在内的ADC驱动程序的一个例子可以在esp-idf中找到:
perials / ADC /single_read/ ADC
*/
void him_adc_init(void)
{
adc1_config_width(ADC_WIDTH_BIT_12);
/*!< ADC1 channel 0 is GPIO36 (ESP32), GPIO1 (ESP32-S2) */
adc1_config_channel_atten(ADC1_CHANNEL_0,ADC_ATTEN_DB_11);
int val = adc1_get_raw(ADC1_CHANNEL_0);
}
/*
读取可能会因为与Wi-Fi冲突而失败,
如果该API的返回值是ESP_ERR_INVALID_STATE,则读取结果无效。
一个使用ADC2驱动读取DAC输出的例子可以在esp-idf中找到:
peripherals/adc/single_read/ ADC2
*/
void him_adc2_init(void)
{
int read_raw;
adc2_config_channel_atten( ADC2_CHANNEL_7, ADC_ATTEN_0db );
/*!< ADC2 channel 7 is GPIO27 (ESP32), GPIO18 (ESP32-S2) */
esp_err_t r = adc2_get_raw( ADC2_CHANNEL_7, ADC_WIDTH_12Bit, &read_raw);
if ( r == ESP_OK )
{
printf("%d\\n", read_raw );
} else if ( r == ESP_ERR_TIMEOUT )
{
printf("ADC2 used by Wi-Fi.\\n");
}
}
- 对比例程,例程中多了三个步骤(
编程指南也没说这些步骤,只能查查api注释了。另外,例程说明写着有用到了dma的,但是我怎么没看到呢):1)检查Two Point或Vref是否烧成eFuse。2)设置特征ADC(?)。3)转换adc_reading到电压mV。(例程在读取ADC时还使用了 多重采样 以减小误差)这些步骤在后面几小节说明。
2) 内部霍尔效应传感器
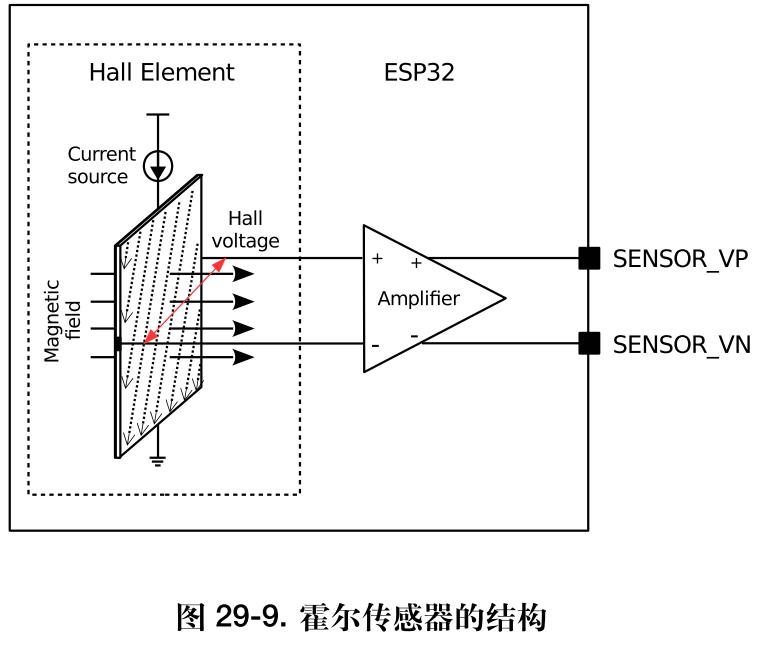
- 根据霍尔效应,当电流垂直于磁场通过 N 型半导体时,会在垂直于电流和磁场的方向产生附加电场,从而在半导体两端形成电势差,具体高低与电磁场的强度和电流大小有关。当恒定电流穿过磁场或电流存在于恒定磁场时,霍尔效应传感器可用于测量磁场强度。霍尔传感器的应用场合非常广泛,包括接近探测、定位、测速与电流检测等。
- ESP32 中的霍尔传感器经过专门设计,可向 SAR ADC 提供电压信号,实现磁场传感功能。在需要低电压的工作模式下,该传感器可由 ULP 协处理器控制。在此类功能的支持下,ESP32 具备的处理能力和灵活性均使其在位置传感、接近检测及测速等应用场景下成为一种极具吸引力的解决方案。
- 霍尔传感器可将磁场转为电压,送入放大器内,而后通过管脚
SENSOR_VP和管脚SENSOR_VN输出。ESP32内置ADC可将信号转化为数字值,交由 CPU 在数字域内完成以下操作。
- 可以通过调用专用函数
hall_sensor_read()通过ADC1读取内部霍尔效应传感器。请注意,即使霍尔传感器是内部的ESP32,从它读取ADC1的通道0和3 (GPIO 36和39)。不要将其他任何东西连接到这些引脚上,也不要改变它们的配置。否则可能会影响传感器对低值信号的测量。
/*
读取内部霍尔效应传感器:在这两个示例中读取的值都是12位宽(范围0-4095)。
*/
void him_adc3_init(void)
{
adc1_config_width(ADC_WIDTH_BIT_12); // ADC1的,只需要设置宽度
while(0)
{
int val = hall_sensor_read(); // 再使用函数读取即可。
printf("val = %d\\r\\n",val);
vTaskDelay(500 / portTICK_RATE_MS);
}
}
- 不是很懂这个传感器是怎么用的,看描述是检测磁场的。但是我把核心板放在电磁感线上滑动,读出来的数值没有明显的规律变化(难道要外界放大器才可以?)。而且原来核心板上的
VP和VN引脚是指这内部霍尔传感器的输出引脚,如果不读取霍尔传感器,那应该也可以作为普通ADC1模块的输入引脚?
3) 尽量减少噪音 Minimizing Noise
- ESP32 ADC对噪声很敏感,导致ADC读数有很大差异。为了减少噪音,用户在使用时可以在ADC输入垫上连接一个
0.1µF的电容。多重采样也可以用来进一步减轻噪声的影响。(例程用的是多重采样)
#define NO_OF_SAMPLES 64 //Multisampling 多重采样 抗锯齿 多级采样 多采样
//Multisampling 多重采样
for (int i = 0; i < NO_OF_SAMPLES; i++) {
if (unit == ADC_UNIT_1) {
adc_reading += adc1_get_raw((adc1_channel_t)channel);
} else {
int raw;
adc2_get_raw((adc2_channel_t)channel, width, &raw);
adc_reading += raw;
}
}
adc_reading /= NO_OF_SAMPLES;
4) ADC校准 ADC Calibration
esp_adc_cal/include/esp_adc_cal.hAPI提供了一些函数,用于校正芯片间ADC参考电压(Vref)变化导致的测量电压差异。每个设计的ADC参考电压是1100 mV,然而在不同的ESP32s中真正的参考电压可以从1000 mV到1200 mV。
但是我不知道为什么找不到这个头文件………………最后无奈,直接到原地址把头文件拷贝到了我的工程目录下才通过了编译。
- 使用此API校正ADC读数涉及在给定衰减下表征其中一个ADC,以获得考虑到ADC参考电压差异的特性曲线(ADC-电压曲线)。特性曲线的形式为
y = coeff_a * x + coeff_b,用于将ADC读数转换为以mV为单位的电压。特性曲线的计算基于可存储在euse或由用户提供的校准值。
static void check_efuse(void)
{
//Check if TP is burned into eFuse 检查TP是否烧入熔断器
if (esp_adc_cal_check_efuse(ESP_ADC_CAL_VAL_EFUSE_TP) == ESP_OK)
printf("eFuse Two Point: Supported\\n");
else
printf("eFuse Two Point: NOT supported\\n");
//Check Vref is burned into eFuse 检查Vref被烧入eFuse
if (esp_adc_cal_check_efuse(ESP_ADC_CAL_VAL_EFUSE_VREF) == ESP_OK)
printf("eFuse Vref: Supported\\n");
else
printf("eFuse Vref: NOT supported\\n");
}
#define DEFAULT_VREF 1100
static esp_adc_cal_characteristics_t *adc_chars;
//Characterize ADC Characterize ADC 特征ADC特征ADC
adc_chars = calloc(1, sizeof(esp_adc_cal_characteristics_t));
/*
说明: 描述ADC在特定衰减下的特性。
该函数将表征ADC在特定衰减下的特性,并生成ADC-电压曲线,形式为[y = coeff_a * x + coeff_b]。
表征可以基于两点值,eFuse Vref,或默认Vref,校准值将按此顺序排列。
返回:
ESP_ADC_CAL_VAL_EFUSE_VREF:用于表征的 eFuse Vref 参考电压
ESP_ADC_CAL_VAL_EFUSE_TP:用于表征的两个点值(仅在线性模式下)
ESP_ADC_CAL_VAL_DEFAULT_VREF:用于表征的默认Vref
参数:
adc_num : 模块号
atte : 衰减
bit_width : 位宽配置
default_vref : 默认ADC参考电压mV(仅在ESP32中,在eFuse值不可用时使用)
chars : 指向用于存储ADC特征的空结构的指针
*/
esp_adc_cal_value_t val_type = esp_adc_cal_characterize(unit, atten, width, DEFAULT_VREF, adc_chars);
- 编程指南还提到了
校准值 Calibration Values没怎么看懂,就不归纳了。这一节的校准也不太看得懂,总之校准之后,使用esp_adc_cal_raw_to_voltage()函数就可以直接转换电压了,如果前面校准正确的。不过我以前在应用中都是软件实现的,手动测量ADC读值和实际电压的关系,然后软件乘于权重转换。所以简单应用的话只需要一开始那三行就可以了,好下一个知识点(迫不及待的快点跳过没用过的知识)。
编程指南最后还有一节:应用程序扩展 Application Extensions :
完整的示例请参见esp-idf: perials /adc/single_read。
- 具有特定衰减特性的ADC:
- 读取ADC,然后将读数转换为电压:
- 将ADC参考电压路由到GPIO,因此可以手动测量(对于
Default Vref):
二、通用定时器
编程指南:通用定时器,久违的中文指南。
数据手册: ESP32 技术参考手册 (PDF),第十八章的:定时器组 (TIMG)。
官方例程:peripherals/timer_group。
简介:ESP32 芯片提供两组硬件定时器,每组包含两个通用硬件定时器。所有定时器均为 64 位通用定时器,包括 16 位预分频器和 64 位自动重载向上/向下计数器。ESP32 的定时器分为 2 组,每组 2 个。(剩下的介绍就不复制粘贴了,都中文指南了)
- 使用方法:结构体+函数(也可以个别专有函数单独设置),初始化后使能,定时器就会开始运作。
- 新概念,警报。指南翻译用语,并不是特指中断,而是指定时器到达时间了,会触发中断和是否重装载值。另外,请勿搞混了,警告值和重装载值是不一样的。一个是结束值,一个是开始值。而且只有重装载值是自动的,警告值每次都要自己设置…………
- 如果要用警报,使能警报,警报触发后会自动关闭,要手动重新使能。还有中断事务,手动注册一个中断的回调函数。
- 如果要用中断,给某个定时器注册一个中断回调函数,顾名思义,该函数会在中断上下文中被执行,因此用户不能在回调函数中调用任何会阻塞 CPU 的 API。相较于从头编写中断处理程序,使用中断回调函数的好处是,用户无需检测和处理中断的状态位,这些操作会由驱动中默认的中断处理程序替我们完成。注意!! 也就是说中断回调函数和中断处理程序是两种不同的使用方法,想起来上一篇中使用编码器的例程时,两个例程也是分别用了2种情况。可以对比理解(?如果我没理解错的话)。
~~ 指南就这么多,直接开始上代码 ~~
- 下面是例程的主要初始化配置函数,其中重装载值为0,警告值由传参决定。开启了中断,其中提到了
ISR中断函数 虽然之前大概明白和Task任务函数 是不一样的,但是没太懂其具体的配置。这里给了个释放,其函数的注释没看懂,简而言之就是注意2点就好了,在中断函数中要读取标志和清除标志两步骤。还要头尾加上timer_spinlock_take()和timer_spinlock_give()。
static void example_tg0_timer_init(int timer_idx,
bool auto_reload, double timer_interval_sec)
{
/*初始化定时器的基本参数*/
/* Select and initialize basic parameters of the timer */
timer_config_t config = {
.divider = TIMER_DIVIDER, // 计数器时钟分频器。范围从2到65536。
.counter_dir = TIMER_COUNT_UP, // 计数方向
.counter_en = TIMER_PAUSE, // 使能定时器————————————————————————————开启这个后再初始化就会直接启动定时器
.alarm_en = TIMER_ALARM_EN, // 定时报警使
.auto_reload = auto_reload, // 定时器自动重载
// .intr_type = TIMER_INTR_LEVEL, // 参数只有一个枚举可以设置…………如果运行在告警模式下,请选择中断类型。
}; // default clock source is APB 默认时钟源为APB,这个结构体有一个被屏蔽的参数,是用来设置时钟源的,应该是想保持默认
timer_init(TIMER_GROUP_0, timer_idx, &config); // ESP32 的定时器分为 2 组,每组 2 个。
/* Timer's counter will initially start from value below. Timer的计数器将从下面的值开始。
Also, if auto_reload is set, this value will be automatically reload on alarm 另外,如果设置了auto_reload,这个值将在告警时自动重新加载 */
timer_set_counter_value(TIMER_GROUP_0, timer_idx, 0x00000000ULL); // 指定定时器的首个计数值(同时这个值也是每次的重装载的值)
/*设置告警值和中断告警。* /
/* Configure the alarm value and the interrupt on alarm. */
timer_set_alarm_value(TIMER_GROUP_0, timer_idx, timer_interval_sec * TIMER_SCALE); // 但是还没使能,第三个参数是设置警告值。
// 请勿搞混了,警告值和重装载值是不一样的。一个是结束值,一个是开始值。
timer_enable_intr(TIMER_GROUP_0, timer_idx); // 允许定时中断,单独设置函数?
/*
寄存器定时器中断处理程序,这个处理程序是一个ISR。处理程序将被附加到运行此函数的同一CPU核心上。
如果设置了 intr_alloc_flags 值 ESP_INTR_FLAG_IRAM ,则处理函数必须声明为 IRAM_ATTR 属性,并且只能调用 IRAM 或 ROM 中的函数。
它不能调用其他计时器api。在这种情况下,使用直接注册访问从ISR内部配置计时器。
如果使用此函数重新注册ISR,则需要编写完整的ISR。
在中断处理程序中,您需要在处理之前调用timer_spinlock_take(..),在处理之后调用timer_spinlock_give(…)。(在上面的中断函数中可以看到)
*/
timer_isr_register(
TIMER_GROUP_0, // 定时器组号
timer_idx, // 定时器组的定时器索引
timer_group0_isr, // 中断处理程序函数
(void *) timer_idx, // 处理函数参数 // 注意,参数是无符合指针类型,所以先强制类型转换了,在中断函数再转回去。
ESP_INTR_FLAG_IRAM, // 用于分配中断的标志
NULL); // 返回句柄的指针。
timer_start(TIMER_GROUP_0, timer_idx); // 使能定时器
}
- 下面是中断函数的示例(已删除些不必要的内容),注意进入中断后 还要重新 设置警告值 和 警报中断。
void IRAM_ATTR timer_group0_isr(void *para)
{
timer_spinlock_take(TIMER_GROUP_0); // 和结尾的 timer_spinlock_give 搭配使用
/* Retrieve the interrupt status and the counter value 获取中断状态和计数器值
from the timer that reported the interrupt 从报告中断的定时器 */
uint32_t timer_intr = timer_group_get_intr_status_in_isr(TIMER_GROUP_0); // 获取中断状态,只在ISR中使用。
uint64_t timer_counter_value = timer_group_get_counter_value_in_isr(TIMER_GROUP_0, timer_idx); // 获取当前的计数器值,只是在ISR中使用。
/* Clear the interrupt 清除中断
and update the alarm time for the timer with without reload 并更新定时器的报警时间与不重载 */
if (timer_intr & TIMER_INTR_T0)
{ // 获取标志位
timer_group_clr_intr_status_in_isr(TIMER_GROUP_0, TIMER_0); // 清除定时器中断状态,仅在ISR中使用。
timer_counter_value += (uint64_t) (TIMER_INTERVAL0_SEC * TIMER_SCALE);
timer_group_set_alarm_value_in_isr(TIMER_GROUP_0, timer_idx, timer_counter_value); // 设置定时器的告警阈值,仅在ISR中使用。
}
else if (timer_intr & TIMER_INTR_T1)
{
timer_group_clr_intr_status_in_isr(TIMER_GROUP_0, TIMER_1); // 清除定时器中断状态,仅在ISR中使用。
}
else
{
// not supported even type 类型都不支持
}
/* After the alarm has been triggered 当告警被触发后
we need enable it again, so it is triggered the next time 我们需要再次启用它,以便下次触发它 */
timer_group_enable_alarm_in_isr(TIMER_GROUP_0, timer_idx); // 启用警报中断,仅在ISR中使用。
timer_spinlock_give(TIMER_GROUP_0); // 和开头的 timer_spinlock_take 搭配使用
}
- 剩下的是主函数调用和主循环等待接收队列打印测试内容。就贴代码了。以上就是定时器组的总结笔记。
以上是关于ESP32 单片机学习笔记 - 04 - ADC和定时器的主要内容,如果未能解决你的问题,请参考以下文章