ESP32 单片机学习笔记 - 01 - gpio&ledc&uart
Posted L建豪 忄YH
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ESP32 单片机学习笔记 - 01 - gpio&ledc&uart相关的知识,希望对你有一定的参考价值。
CSDN的大大bug,为什么我的“无须”格式不能用啊,太难受了。所有排版的“无序”、“有序”、“待办”都不能用。下面的排版可能略显难看了。感觉不方便观看的,可以在github上找备份查看。
ESP32 单片机学习笔记 - 01 - gpio&ledc&uart
零、准备相关资料
1、 教程笔记:ESP32开发指南目录(开源一小步出品),这是由“嘉友创科技”发布在CSDN上的教程,我前期准备编译环境的时候也参考了,虽然没起到什么作用。不过后面的章节编写esp32例程的内容很完善,所以还是很推荐。感谢作者的总结整理。
2、 官方指南:ESP-IDF 编程指南,是官方编写的指南,内容很全,其实光看这个就可以了。但是因为内容有点跳跃性,我作为小白要完全看懂还是有点困难,要搭配教程笔记看比较好。在“API参考”里就是例程的讲解。
3、 技术手册:ESP32 H/W 硬件参考,光看软件程序不行,还要结合硬件一起思考理解才到位。同样是在官方指南里,分类属于“ESP32 H/W 硬件参考”,第一个“ESP32 技术参考手册 (PDF)”就是芯片的数据手册,描写了各种硬件资源、寄存器配置等。
4、 官方例程:github:esp-idf/examples/,在esp-idf文件夹下或是vscode插件内也可以查看,这里放出git仓库里的连接。直接在网页查看还是挺方便的。/peripherals里主要就是要学习的外设,学单片机,先从外设入手。会用了,其他什么都好说。
- 至此准备好这4样资料,再加上已经弄好的编译环境,就可以开始学习esp32了。直接上代码例程,快速入门。我使用的vscode编写+cmd编译,vscode的插件一直没弄好,而且发现还是cmd更加好用一点。如果编译有错一样可以看错误内容和错误行数,也能检查错误,而且运行速度还很快。
注意事项:
- 我发现esp32芯片的IO命名格式是IOx,而开发板上的明明就是Dx,是一一对应的。但是看了esp8266的教程时发现,教程里说esp8266模块的Dx不是和IOx一一对应的?!之后用时留意一下。
一、get-started/hello_world&key&led
官方例程:github:esp-idf/examples/get-started/
官方指南:没有专门列出来,一部分应该是属于刚测试板子能不能正常下载或编译的内容,所以没单独讲。
教程笔记:第八章 ESP32驱动LED灯
在示例文件
get-started下,有2个最基本的IO控制和打印输出文件,再结合大佬的笔记:ESP32开发 2.添加.c.h并修改CMakeLists,来定制自己的工程。先自己动手编写一个工程,实现串口打印,点亮led灯,还有读取按键。
- 和普通的单片机类似,可以使用一个快捷初始化函数配置io口
gpio_pad_select_gpio,然后再设置一下输入输出方向gpio_set_direction,还有高低电平gpio_set_level,或是读取电平gpio_get_level就可以了。串口打印就是print,因为没有本地库直接查看,所以也不知道链接到哪里了。初始化等工作好像已经预先做了一部分了。
/* 快捷初始化 */
gpio_pad_select_gpio(BLINK_GPIO);
/* Set the GPIO as a push/pull output */
gpio_set_direction(BLINK_GPIO, GPIO_MODE_OUTPUT);
/* 设置电平 */
gpio_set_level(BLINK_GPIO, 1);
/* 读取电平 */
esp_err_t flag_i = gpio_get_level(18);
- 简单的api函数还可以跳到头文件去
gpio.h查看,读取电平函数就是这样找到的。初步探索成功,同时在工程components下展开自己的库,开始培养习惯,初步就是如此。
二、peripherals/gpio
官方例程:github:esp-idf/examples/peripherals/gpio/。
官方指南:GPIO & RTC GPIO,官方指南的这一章只有一小撮英文介绍,然后全是API介绍。
教程笔记:第九章 ESP32的GPIO输入按键操作,教程里并没有提到RTC,也没涉及到到任务和队列。
- 配置io方面,使用传统的结构体
gpio_config_t+初始化gpio_config组合,可以打开声明查看更多的枚举/宏定义设置。同时也可以同时选择多个引脚,记得使用移位的方式转换,不是直接丢十进制。还有,常用的改变
#define GPIO_OUTPUT_IO_0 5
#define GPIO_OUTPUT_IO_1 19
#define GPIO_OUTPUT_PIN_SEL ((1ULL<<GPIO_OUTPUT_IO_0) | (1ULL<<GPIO_OUTPUT_IO_1))
gpio_config_t io_conf;
//disable interrupt 禁止中断
io_conf.intr_type = GPIO_PIN_INTR_DISABLE;
//set as output mode 设置为输出模式
io_conf.mode = GPIO_MODE_OUTPUT;
//bit mask of the pins that you want to set,e.g.GPIO18/19 您想要设置的引脚的位掩码,例如gpio18 /19
io_conf.pin_bit_mask = GPIO_OUTPUT_PIN_SEL;
//disable pull-down mode 关闭下拉模式
io_conf.pull_down_en = 0;
//disable pull-up mode 禁用上拉模式
io_conf.pull_up_en = 0;
//configure GPIO with the given settings 使用给定的设置配置GPIO
gpio_config(&io_conf);
//change gpio intrrupt type for one pin 更改一个引脚的gpio中断类型
gpio_set_intr_type(GPIO_INPUT_IO_0, GPIO_INTR_ANYEDGE);
- 有点注意的,不需要使能总线下的分时钟,esp只有一个系列的引脚。手册里全写的是GPIOx,不像其他单片机那么多引脚,还要加前缀区分。
再者,没想到第一个外设例程
peripherals/gpio就那么复杂,用到了线程和信号量?类比最近刚学的RT-Thread系统,好像和esp内的FreeRTOS是类似的系统。(嘿嘿,之前学习的作用那么快体现了)
static xQueueHandle gpio_evt_queue = NULL;
static void IRAM_ATTR gpio_isr_handler(void* arg)
{
uint32_t gpio_num = (uint32_t) arg;
xQueueSendFromISR(gpio_evt_queue, &gpio_num, NULL);
}
static void gpio_task_example(void* arg)
{
uint32_t io_num;
for(;;) {
if(xQueueReceive(gpio_evt_queue, &io_num, portMAX_DELAY)) {
printf("GPIO[%d] intr, val: %d\\n", io_num, gpio_get_level(io_num));
}
}
}
//create a queue to handle gpio event from isr 创建一个队列来处理isr中的gpio事件
gpio_evt_queue = xQueueCreate(10, sizeof(uint32_t));
//start gpio task 开始gpio任务
xTaskCreate(gpio_task_example, "gpio_task_example", 2048, NULL, 10, NULL);
//install gpio isr service 安装gpio isr服务
gpio_install_isr_service(ESP_INTR_FLAG_DEFAULT);
//hook isr handler for specific gpio pin 钩子isr处理程序为特定的gpio引脚
gpio_isr_handler_add(GPIO_INPUT_IO_0, gpio_isr_handler, (void*) GPIO_INPUT_IO_0);
//hook isr handler for specific gpio pin 钩子isr处理程序为特定的gpio引脚
gpio_isr_handler_add(GPIO_INPUT_IO_1, gpio_isr_handler, (void*) GPIO_INPUT_IO_1);
//remove isr handler for gpio number. 删除gpio编号的isr处理程序。
gpio_isr_handler_remove(GPIO_INPUT_IO_0);
//hook isr handler for specific gpio pin again 再次挂钩特定gpio引脚的isr处理程序
gpio_isr_handler_add(GPIO_INPUT_IO_0, gpio_isr_handler, (void*) GPIO_INPUT_IO_0);
- 结合之前学的
RT-Thread知识,知道isr函数就是指中断函数的意思。通过例程可得知,在使用中断功能前,还需要先安装gpio_install_isr_service,如果链接之后还可以删除,删除后也可以再链接。 - 还有前一步的
xQueueCreate队列创建API,创建了一个长度为10的队列,编写了当队列接收到信号时就执行对应的函数gpio_task_example,这个信号由中断函数中发出。使用xTaskCreate初始化该任务(函数)。看这个参数列表就感觉很亲切,和RTT系统类似。第一个盲猜是该任务的函数名,第二是该任务的名字,在rtt系统中一般称为线程,使用的英文也是thread。在freertos中则用task,中文意思是任务。这个大同小异,问题不大。第三个应该是指2048运行空间,第四个指任务函数的参数,是空。第五个是优先级或是时间片?第六个是运行模式设置? task任务,有点注意的是函数设置的参数是NULL,然后函数里通过获取队列信息来得到参数。根据注释“创建一个队列来处理isr中的gpio事件”,应该是为了一种编程思维——程序不堆在中断中执行,所以才设立了额外的task任务。- 更多关于
task任务的资料,可以上官方手册上找,没想到还是全英文的,我以为esp是国产的?在api文档中搜索xTaskCreate。
三、peripherals/ledc/
官方例程:github:esp-idf/examples/peripherals/ledc/。
官方指南:LED PWM 控制器,这一部官方指南就有很详细的介绍了,而且我还发现原来浏览器也适用快捷键"ALT+←/→"进行返回跳转,结合指南来查看api定义,某种长度上比ide还方便。
教程笔记:第十章 ESP32开发指南—PWM全彩LED灯显示。
数据手册:ESP32 技术参考手册,在PDF的第十四章:LED PWM 控制器 (LEDC)。
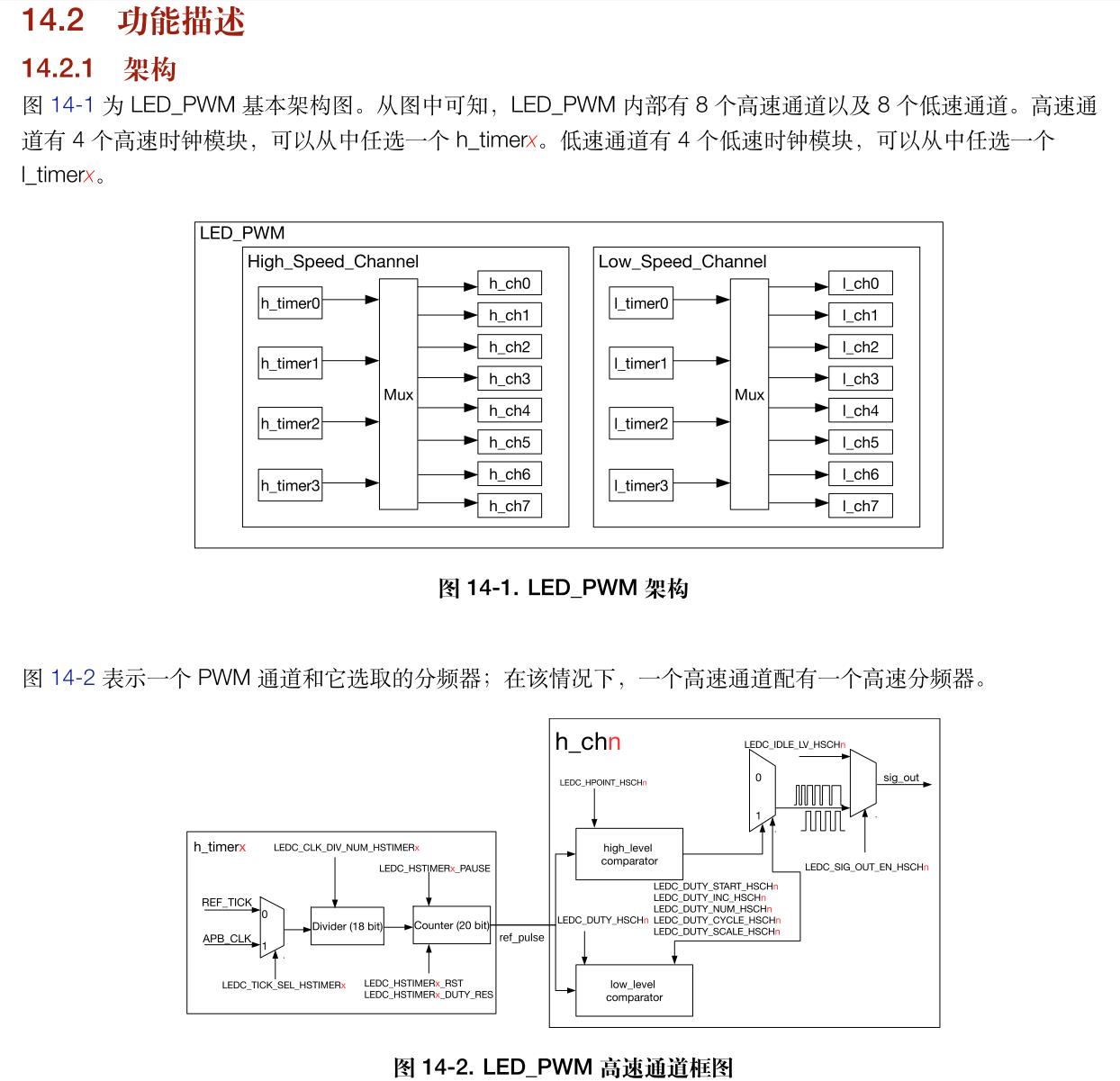
- 先看官方指南,根据“功能概览”可知,第一步 定时器配置 ;第二步 通道配置 ; 第三步 改变PWM信号 。再对应例程代码,和每一步的介绍来看。
ledc_timer_config_t ledc_timer = { // 创建的同时直接指定值,记住该结构体的用法
.duty_resolution = LEDC_TIMER_13_BIT, // resolution of PWM duty PWM占空比分辨力
.freq_hz = 5000, // frequency of PWM signal PWM信号频率
.speed_mode = LEDC_HIGH_SPEED_MODE, // timer mode 计时模式
.timer_num = LEDC_TIMER_0, // timer index 计时器索引
.clk_cfg = LEDC_AUTO_CLK, // Auto select the source clock 自动选择源时钟
};
// Set configuration of timer0 for high speed channels 设置高速通道的timer0配置
ledc_timer_config(&ledc_timer);
/*
* Note: if different channels use one timer, 注意:如果不同的通道使用一个定时器,
* then frequency and bit_num of these channels will be the same 那么这些通道的 频率 和 分辨率 将是相同的
*/
ledc_channel_config_t ledc_channel = {
.channel = LEDC_CHANNEL_0, // controller's channel number 选择定时器通道号
.duty = 0, // output duty cycle, set initially to 0 输出占空比,取值范围[0, (2**duty_resolution)]
.gpio_num = 5, // GPIO number where LED is connected to LED所连接的GPIO编号
.speed_mode = LEDC_HIGH_SPEED_MODE, // speed mode, either high or low 速度模式,高或低
.hpoint = 0, // LEDC channel hpoint value, the max value is 0xfffff LEDC通道点值,最大值为0xfffff
.timer_sel = LEDC_TIMER_0 // timer servicing selected channel 选择定时器(0-3)
};
ledc_channel_config(&ledc_channel);
ledc_set_duty( //使用软件改变 PWM 占空比
ledc_channel.speed_mode, // 同下
ledc_channel.channel,
4000); // 注意,使用软件的话没有过渡时间的功能设置
ledc_update_duty(
ledc_channel.speed_mode, // 同下
ledc_channel.channel);
ledc_fade_func_install(0); // Initialize fade service. 初始化 渐变 服务。
ledc_set_fade_with_time( // 使用硬件改变 PWM 占空比
ledc_channel.speed_mode, // 选择高低速
ledc_channel.channel, // 选择通道数
4000, // 设置占空比
3000); // 设置过渡时间
ledc_fade_start( // 使新配置生效
ledc_channel.speed_mode, // 同上
ledc_channel.channel,
LEDC_FADE_NO_WAIT); // Whether to block until fading done. 是否阻塞直到淡出。
- 以上就是三步走流程主要代码,依旧是
struct+config就完事了。需要注意的几点:
- 软件修改占空比没有过渡时间,属于直接修改。硬件修改占空比之前需要先调用
ledc_fade_func_install。 - 占空比取值范围和分辨率有关,然后分辨率又和频率有关。
ledc_channel_config_t结构体中,hpoint通道点数还不知道是什么作用。在教程笔记里是没有写出这个参数,大概是暂不用关心其作用吧。而例程中少写了一个intr_type中断使能参数。- 硬件的修改占空比,在
ledc_fade_start生效函数中可以选择模式,例如:LEDC_FADE_NO_WAIT。
再结合硬件知识了解一下配置,可以
ledc_timer_bit_t分辨率(1-20),ledc_mode_t计时模式(高或低),ledc_timer_tLEDC定时器(0-3),ledc_channel_tLEDC通道(0-7)。
- 更多操作:改变PWM频率,控制 PWM 的更多方式,使用中断,高低速模式的区别,这些可到用时再自行查手册。值得注意的是:频率和占空比分辨率支持范围,不同的分频/频率,对应不同的分辨率,计算公式一代入就可以了。类比玩智能车时,设置的频率、占空比、总占空比。当时的库应该是打包了计算,又因为没有超出范围,所以并没有在意分辨率这个参数。
四、peripherals/uart/
官方例程:github:esp-idf/examples/peripherals/uart/,官方例程给了很多个uart例程,官方指南也是全英文的,所以我先从教程笔记入手,先学习怎么用基本的功能。
官方指南:UART,又是全英文的一篇,呜呜。
教程笔记:第十一章 ESP32的两个UART实验,笔记里写的映射引脚和我板子不一样,各位在使用时也要注意一下,查看对应的手册查找。避免怀疑自己。
数据手册:ESP32 技术参考手册,在PDF的第十三章:UART 控制器 (UART)。
模块手册:ESP32WROOM32,其中有2.2 管脚定义记录了引出的引脚定义,可以看到开发板上引出来的uart0和uart2到底指哪个引脚。
- 首先,我想找到esp32模块的下载程序时用到的是哪个串口,按照之前的思维,我跳转到调用了主函数
app_main的地方,找到了esp32/cpu_start.c,里面有2个cpu核心的call_start_cpu0/1函数。其中call_start_cpu0类比之前学过的RT-Tread系统,频率初始化、向量加载、然后开始特有的外部ram和flash初始化、之后一堆没怎么看懂的各种初始化。然后call_start_cpu1函数就简单多了,只有一些基本的初始化,其中uart0的初始化也在其中,跳转只能调到头文件,看不到具体内容,不过注释写着就是初始化uart0,看来是写死的函数。在文件的最后有main_task任务函数,里面调用了主函数app_main。
- 教程笔记里的例程内容是初始化uart1和uart2,再分别创建2个
task任务函数,分别接收另一个串口的信息并发回去,主函数再分别发一次作为起始条件。总结:第一步:初始化;第二步:读或收就可以了。注意,在config配置好后,还需要进行两步操作:IO映射和安装使能。然后就可以正常读写了。
因为uart1是连接模组上集成的 SPI flash,所以我想改为uart0,但是串口又是系统的打印函数。而且不知道为什么没有预期实验效果……试官方例程是可以,应该是我哪里弄错了……或者不可以串联uart0和uart2?在官方例程的基础上改动和学习吧,教程笔记也可能有过期或是错误的。第二天,我又重新写了一遍配置函数又可以了……任务函数还没变,可能之前我哪里弄错了。我对比了一下配置函数,好像也是一样的。不过
uart0打印还是有点问题,应该是接收的问题?“L�&�+�This is a test string. - 4;This is a test string. - 4”???
uart_config_t uart_config = {
.baud_rate = 115200,
.data_bits = UART_DATA_8_BITS,
.parity = UART_PARITY_DISABLE,
.stop_bits = UART_STOP_BITS_1,
.flow_ctrl = UART_HW_FLOWCTRL_DISABLE,
.rx_flow_ctrl_thresh = 122,
};
// Configure UART parameters
uart_param_config(uart_num, &uart_config);
// Set UART pins(TX: IO17 (UART2 default), RX: IO16 (UART2 default), RTS: IO18, CTS: IO19)
uart_set_pin(uart_num, tx_io, rx_io, UART_PIN_NO_CHANGE, UART_PIN_NO_CHANGE);
// Setup UART buffered IO with event queue 使用事件队列设置UART缓冲IO
const int uart_buffer_size = (512 * 2);
// QueueHandle_t uart_queue;
// Install UART driver using an event queue here 安装UART驱动程序,不需要事件队列
uart_driver_install(uart_num, uart_buffer_size, \\
uart_buffer_size, 10, NULL, 0);
//串口0数据发送测试,参数分别是:串口号、数据指针、数据大小
uart_write_bytes(UART_NUM_0, "uart0 test OK ", strlen("uart0 test OK "));
//分配内存,用于串口接收
uint8_t* data = (uint8_t*) malloc(1024+1);
//获取串口1接收的数据,返回的是接收多少个字节,如果是0就是超时了。最后一个参数也就是超时时间/等待时间
const int rxBytes = uart_read_bytes(UART_NUM_0, data, 1024, 10 / portTICK_RATE_MS);
1) UART Overview
接下来介绍官方指南的介绍:深入了解
esp32/uart的使用方法。
- 指南总结使用uart的六个步骤,其中三个是必须的配置阶段:1.设置通信参数-设置波特率、数据位、停止位等。;2.设置通信引脚—为设备分配连接引脚。;3.驱动安装—为UART驱动分配ESP32的资源。。第四个是运行阶段:运行UART通信-发送/接收数据。第五六属于可选的:使用中断——触发特定通信事件的中断、删除驱动程序——如果不再需要UART通信,则释放已分配的资源。另外,值得注意的是每个函数都会有
uart_port_t参数,用来指定串口号,选择范围是(0、1、2)。
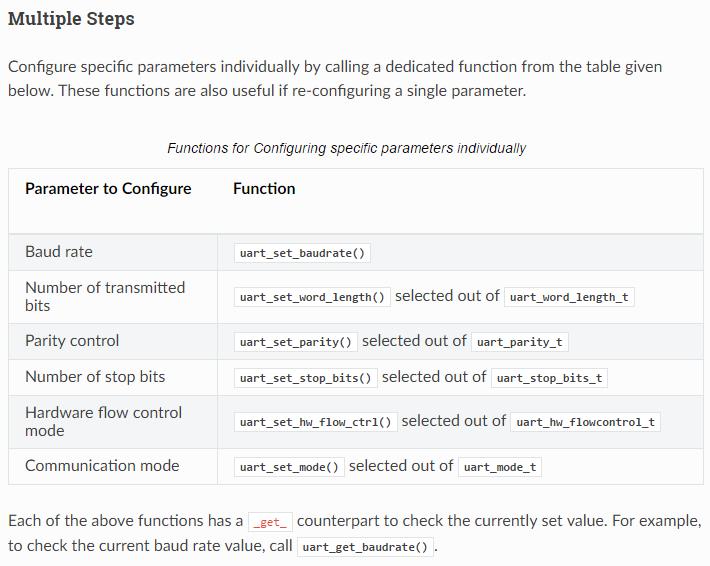
- 第一步:设置通信参数,指南提出两中方案,一种是一步到位的全部配置。也就是上面代码的例子,使用
struct+config一步到位。第二种就是分步式,因为esp-idf提供了很多单独set设置的API,还每个对应的有一个get读取API可调用。如下图所示:
- 第二步:设置通信引脚,调用
uart_set_pin函数填充对应函数即可,这一不的功能就有点想引脚初始化或是引脚复用,因为uart模块可能支持多个引脚的复用,那我们就需要选定使用哪个引脚。同时,它本身也有默认配置,如果不想修改为自己指定的引脚(比如用不到的引脚就懒得管它了),那可以填充UART_PIN_NO_CHANGE作为替换。上面代码里也有出现对应的操作,对于RTS引脚和CTS引脚的选定参数保持默认,而指南里是对RX和TX引脚保持默认。另外需要注意,指南里还使用到了ESP_ERROR_CHECK宏定义来嵌套调用函数,应该是起到一个检查参数的作用。
小插曲,我以为uart2的默认引脚是
IO17和IO16,就使用了UART_PIN_NO_CHANGE代替,官方指南也是这么写的。没想到死活接收不到发送出来的信息,然后我以为是配置不对,就把串口号改为uart0,通过使用默认引脚,这又可以发送内容,所以就排除了是配置过程出现问题。再者就是测试硬件是否连通,用万用表测得tx2和rx2也都是接到模块的io17和io16上的。最后,我尝试不使用默认参数,而是指定io17和io16结果就成功了。所以我得出:esp32的uart2默认引脚不是io17和io16,但是这又和指南和手册的说明矛盾了……
- 第三步:驱动程序安装,一旦设置了通信引脚,通过调用
uart_driver_install()安装驱动程序,并指定以下参数:Tx环形缓冲区的大小、Rx环形缓冲区的大小、事件队列句柄和大小、标记来分配中断。该函数将为UART驱动程序分配所需的内部资源。完成此步骤后,就可以连接外部UART设备并检查通信。(官方指南的翻译,写的很明确)
// Setup UART buffered IO with event queue 使用事件队列设置UART缓冲IO
const int uart_buffer_size = (1024 * 2);
// 这一步还不太能理解,先放一放,看到后面自然明白。
QueueHandle_t uart_queue;
// Install UART driver using an event queue here 使用事件队列安装UART驱动程序
ESP_ERROR_CHECK(uart_driver_install(UART_NUM_2, uart_buffer_size, \\
uart_buffer_size, 10, &uart_queue, 0));
个人理解
uart_driver_install中的uart_queue参数,在官方指南的API说明中是这样介绍的:UART事件队列句柄(输出参数)。如果成功,将在这里写入一个新的队列句柄,以提供对UART事件的访问。如果设置为NULL,驱动程序将不使用事件队列。再结合前面学习gpio时也用到了QueueHandle队列句柄,再翻看之前的gpio的例程中使用的是static xQueueHandle gpio_evt_queue = NULL;而uart例程使用的static QueueHandle_t uart0_queue;,其中通过跳转可以发现xQueueHandle是QueueHandle_t的一个打包宏定义(别名),不知道为什么要定义那么多个重名……再结合应用场景,很“理所当然/自然”的就明白了:如果配置了这个参数,当串口接收或发送(后来结合例程实践得知,当串口每次状态变化都会触发一次,不只是接收和发送)信息时就会产生一个队列信号,再用xQueueReceive函数获取。这样就可以代替中断功能了(?)。(学了rtos操作系统后)比起中断,我也更加喜欢用线程+队列来运行。
2) peripherals/uart/uart_events/
- 官方例程:esp-idf/examples/peripherals/uart/uart_events/,官方有很多个例程,我先从这个开始讲起。
经过测试,发现该例程的功能是接收串口数据,以特定数量的连续帧尾结束。如果这次接收的数据中不包含帧尾则普通输出,如果包涵就会直接截断,剩下的数据会作为第二次读取的内容。(一开始惯性思维,一直以为是帧头,一直没弄清试验规律)
实验现象相当有趣,因为我很好奇,串口是怎么判断接收的数据中包含特定帧尾的。如果要监测应该是已经接收过一次才对,但是根据例程中,在
uart_driver_install安装UART驱动程序时,指定的uart0_queue队列,在uart_event_task任务中,(这3句话连在一起可能有点绕)是先监测到了队列内容,队列内的数据是结构体(巧妙的用法,越发感觉到对象用法的样子)。结构体内的type属性就已经指明了接收了什么数据。
如果数据中包含帧尾就会返回
UART_PATTERN_DET标志,如果是普通数据就返回UART_DATA标志。判断了标志才进行读取串口内容的。而且如果包含帧尾就会只读取到帧尾,剩下的数据就会保留到下次,还能继续触发队列返回。FreeRTOS系统真的是奇妙!
- 以下来总结一下程序流程:
- 第一阶段:1)配置UART驱动程序参数; 2)安装UART驱动程序 和 队列; 3)设置UART引脚;
- 第二阶段:1)设置uart模式检测函数; 2)设置检测标志的最大长度(好像不是数据的长度,而是帧尾的长度,那在上一步应该就设置好了才对,所以这一步是保护措施?);
- 第三阶段:1)创建任务来处理队列内容;2)编写任务的内容,读取队列,检查
event.type,根据要求打印对应内容。 - 额外操作:这个例程里还用到了
esp_log_level_set日志设置和ESP_LOGI日志打印,根据实验现象,感觉和printf打印类似,不同的是打印的内容会有前缀后缀包裹,如果是用终端接收,这些前缀后缀就代表了显示的颜色,如果是用其他铺铜串口助手接收,那会显示未知字符。这应该不算必要项,只是看看
/* Configure parameters of an UART driver, 配置UART驱动程序参数,
* communication pins and install the driver 通信引脚和安装驱动程序 */
uart_config_t uart_config = {
.baud_rate = 115200,
.data_bits = UART_DATA_8_BITS,
.parity = UART_PARITY_DISABLE,
.stop_bits = UART_STOP_BITS_1,
.flow_ctrl = UART_HW_FLOWCTRL_DISABLE,
.source_clk = UART_SCLK_APB,
};
uart_param_config(EX_UART_NUM, &uart_config);
//Install UART driver, and get the queue. 安装UART驱动程序,获取队列。
uart_driver_install(EX_UART_NUM, BUF_SIZE * 2, BUF_SIZE * 2, 20, &uart0_queue, 0);
//Set UART log level 设置UART日志级别
esp_log_level_set(TAG, ESP_LOG_INFO);
//Set UART pins (using UART0 default pins ie no changes.) 设置UART引脚(使用UART0默认引脚,即没有改变)
uart_set_pin(EX_UART_NUM, UART_PIN_NO_CHANGE, UART_PIN_NO_CHANGE, UART_PIN_NO_CHANGE, UART_PIN_NO_CHANGE);
//Set uart pattern detect function. 设置uart模式检测函数。
uart_enable_pattern_det_baud_intr(EX_UART_NUM, '+', PATTERN_CHR_NUM, 9, 0, 0);
//Reset the pattern queue length to record at most 20 pattern positions. 将图案队列长度重置为最多记录20个图案位置。
uart_pattern_queue_reset(EX_UART_NUM, 20);
//Create a task to handler UART event from ISR 创建一个任务来处理来自ISR的UART事件
xTaskCreate(uart_event_task, "uart_event_task", 2048, NULL, 12, NULL);
static void uart_event_task(void *pvParameters)
{
/* 省略 */
if(xQueueReceive(uart0_queue, (void * )&event, (portTickType)portMAX_DELAY))
switch(event.type)
{ /* 根据不同标志做出内容 */}
/* 省略 */
}
- 例程里还有几个触发事件类型没试验出现象,所以我也不太清楚具体是什么时候用的,之后遇到在回过头看吧。它们分别是:
UART_FIFO_OVF,UART_BUFFER_FULL,UART_BREAK,UART_PARITY_ERR,UART_FRAME_ERR。感觉这种形式有点想python中的typ检错。
额外试验:测了一下,
uart_read_bytes读取函数的rxBytes返回值的值代表接收到的数据长度。在教程中,如果要发送原数据,还需要手动在最后加一个结束符,这个结束符是0。好奇为什么不是\\0?或是其他值,为了确保用rxBytes来指定结尾处。应该也是为了怕初始化内存里的值是未知数,所以要手动赋值0,以防万一。
- 看了一下
uart_async_rxtxtasks和uart_select例程内的试验简介,感觉大同小异。这里为了赶进度和篇幅就暂时跳过,之后要用到了再回来看。
以上是关于ESP32 单片机学习笔记 - 01 - gpio&ledc&uart的主要内容,如果未能解决你的问题,请参考以下文章