浏览器原理 37 # 任务调度:有了setTimeOut,为什么还要使用 requestAnimationFrame?
Posted 凯小默
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了浏览器原理 37 # 任务调度:有了setTimeOut,为什么还要使用 requestAnimationFrame?相关的知识,希望对你有一定的参考价值。
说明
浏览器工作原理与实践专栏学习笔记
什么是 requestAnimationFrame ?
https://developer.mozilla.org/zh-CN/docs/Web/API/Window/requestAnimationFrame
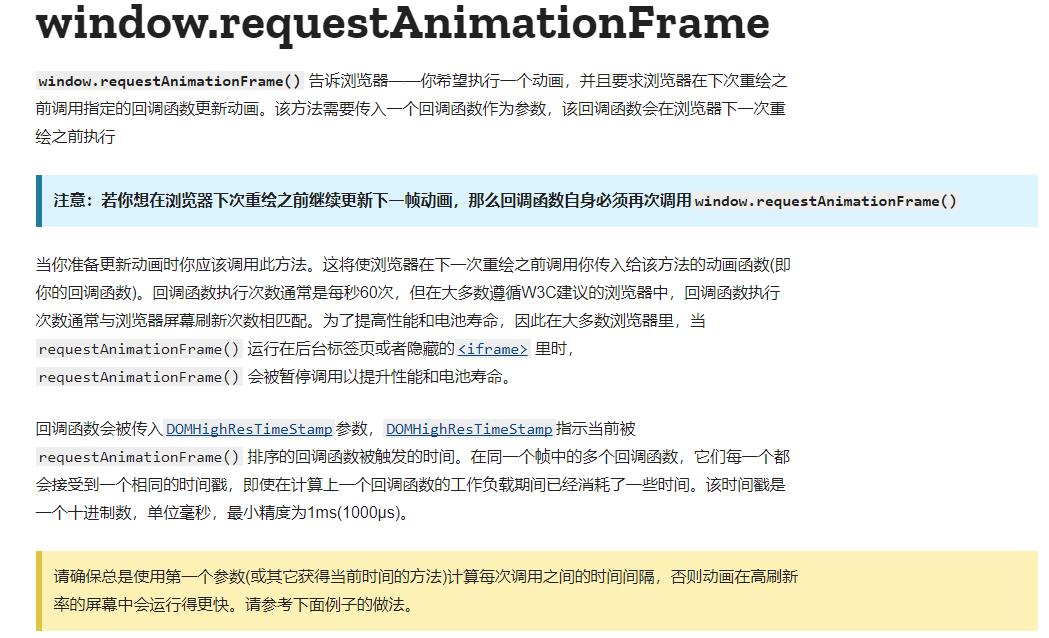
实现动画效果的方法比较多,javascript 中可以通过定时器 setTimeout 来实现,css3 可以使用 transition 和 animation 来实现,html5 中的 canvas 也可以实现。除此之外,html5 还提供一个专门用于请求动画的API,那就是 requestAnimationFrame,顾名思义就是请求动画帧。
- 屏幕刷新频率:屏幕每秒出现图像的次数。普通笔记本为60Hz
- 动画原理:计算机每16.7ms刷新一次,由于人眼的视觉停留,所以看起来是流畅的移动。
- 优雅降级:由于兼容性问题,需要降级对接口进行封装,优先使用高级特性,再根据浏览器不同情况进行回退,直到只能使用settimeout。
setTimeout:通过设定间隔时间来不断改变图像位置,达到动画效果。但是容易出现卡顿、抖动的现象;
原因是:
- settimeout 任务被放入异步队列,只有当主线程任务执行完后才会执行队列中的任务,因此实际执行时间总是比设定时间要晚;
- settimeout 的固定时间间隔不一定与屏幕刷新时间相同,会引起丢帧。
requestAnimationFrame:由系统决定回调函数的执行时机。60Hz的刷新频率,那么每次刷新的间隔中会执行一次回调函数,不会引起丢帧,不会卡顿。
优点:
- CPU节能:使用setTimeout实现的动画,当页面被隐藏或最小化时,setTimeout 仍然在后台执行动画任务,由于此时页面处于不可见或不可用状态,刷新动画是没有意义的,完全是浪费CPU资源。而requestAnimationFrame则完全不同,当页面处理未激活的状态下,该页面的屏幕刷新任务也会被系统暂停,因此跟着系统步伐走的requestAnimationFrame也会停止渲染,当页面被激活时,动画就从上次停留的地方继续执行,有效节省了CPU开销。
- 函数节流:在高频率事件(resize,scroll等)中,为了防止在一个刷新间隔内发生多次函数执行,使用requestAnimationFrame可保证每个刷新间隔内,函数只被执行一次,这样既能保证流畅性,也能更好的节省函数执行的开销。
单消息队列的队头阻塞问题
任务和消息队列:
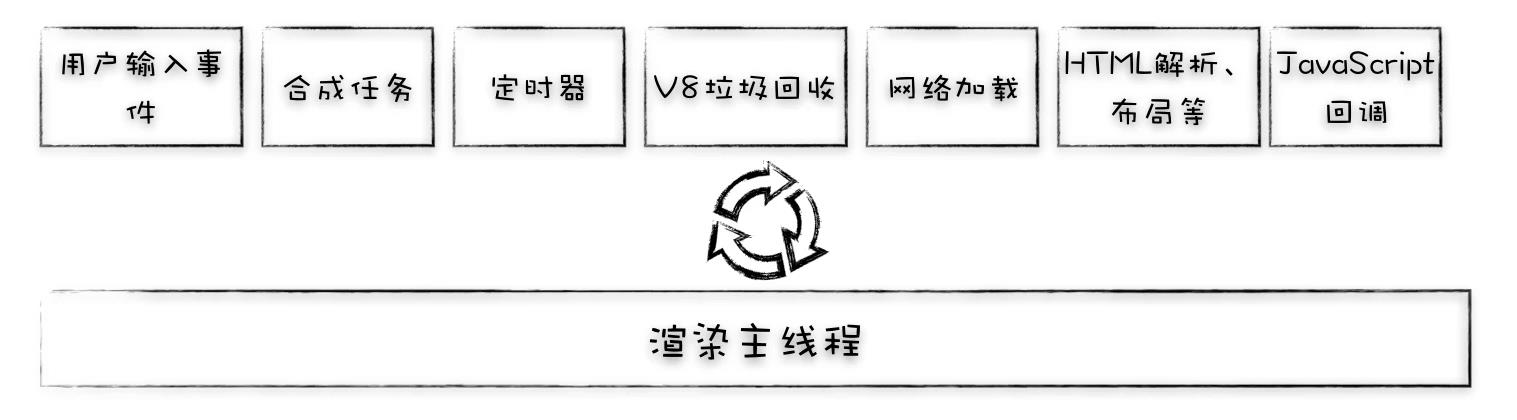
队头阻塞问题:
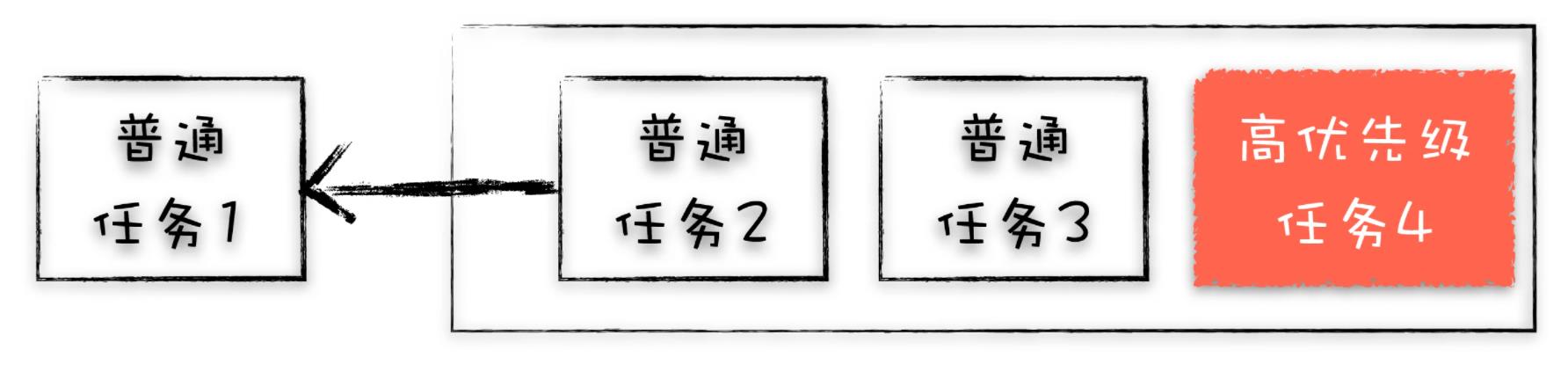
在单消息队列架构下,存在着低优先级任务会阻塞高优先级任务的情况,这个问题称为消息队列的队头阻塞问题。
Chromium 是如何解决队头阻塞问题的?
1. 第一次迭代:引入一个高优先级队列
应该视为高优先级的任务:
- 通过鼠标触发的点击任务、滚动页面任务;
- 通过手势触发的页面缩放任务;
- 通过 CSS、JavaScript 等操作触发的动画特效等任务。
引入高优先级的消息队列:
在渲染进程中引入一个任务调度器,负责从多个消息队列中选出合适的任务,通常实现的逻辑,先按照顺序从高优先级队列中取出任务,如果高优先级的队列为空,那么再按照顺序从低优级队列中取出任务。
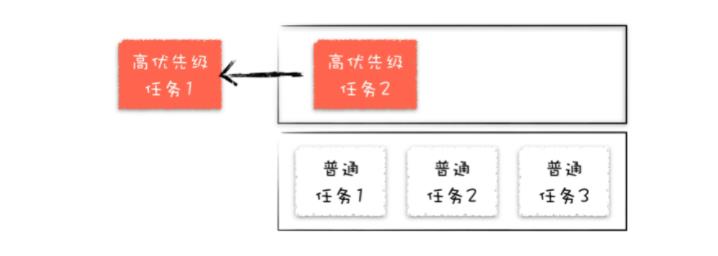
增加多个不同优先级的消息队列:
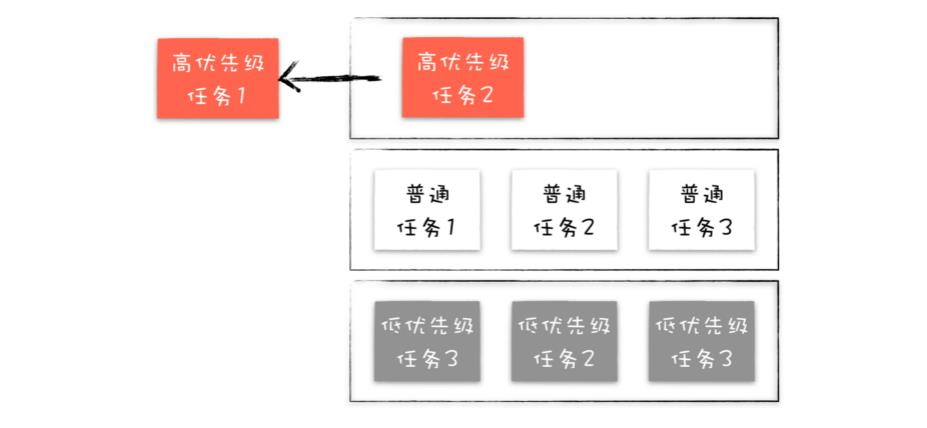
缺点:任务的相对执行顺序会被打乱。
怎么解决这个问题?
让一些相同类型的任务保持其相对执行顺序。
2. 第二次迭代:根据消息类型来实现消息队列
不同类型的任务创建不同优先级的消息队列:
- 可以创建输入事件的消息队列,用来存放输入事件。
- 可以创建合成任务的消息队列,用来存放合成事件。
- 可以创建默认消息队列,用来保存如资源加载的事件和定时器回调等事件。
- 还可以创建一个空闲消息队列,用来存放 V8 的垃圾自动垃圾回收这一类实时性不高的事件。
根据消息类型实现不同优先级的消息队列:
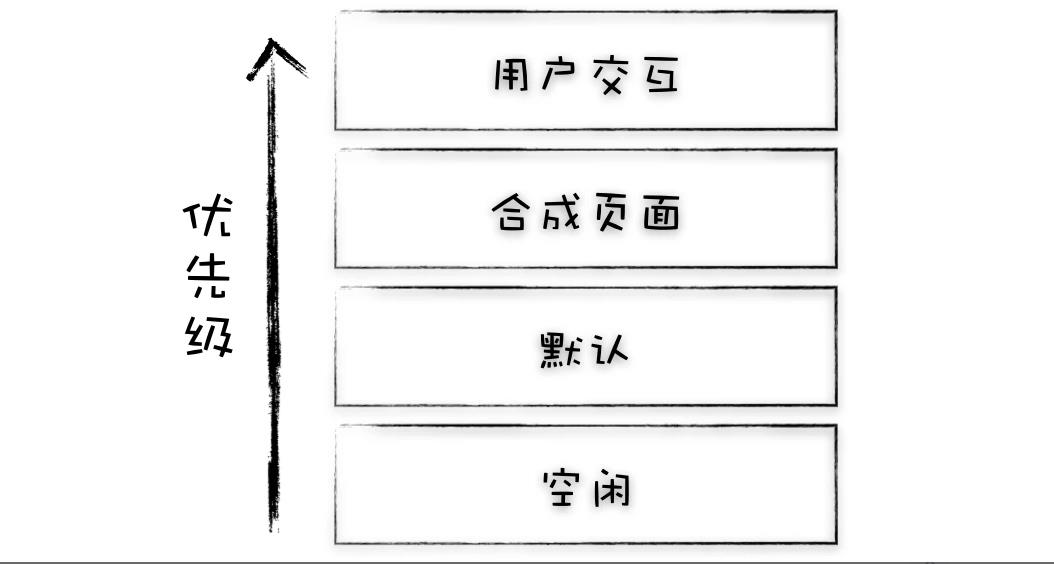
缺点:消息队列的优先级都是固定的,任务调度器会按照这种固定好的静态的优先级来分别调度任务。使用静态优先级策略,网页的加载速度会被拖慢。
3. 第三次迭代:动态调度策略
Chromium 当前所采用的任务调度策略:动态调度策略
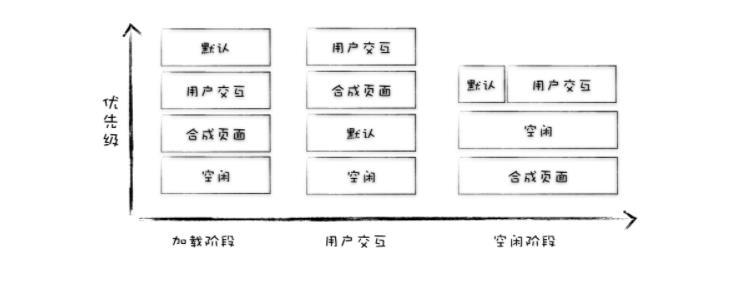
页面加载阶段
这个阶段,用户的最高诉求是在尽可能短的时间内看到页面,应将页面解析,JavaScript 脚本执行等任务调整为优先级最高的队列,而交互和合成并不是这个阶段的核心诉求。
交互阶段
前缓冲区
在显卡中有一块叫着前缓冲区的地方,这里存放着显示器要显示的图像,显示器会按照一定的频率来读取这块前缓冲区,并将前缓冲区中的图像显示在显示器上,不同的显示器读取的频率是不同的,通常情况下是 60HZ,也就是说显示器会每间隔 1/60 秒就读取一次前缓冲区。
如果浏览器要更新显示的图片,那么浏览器会将新生成的图片提交到显卡的后缓冲区中,提交完成之后,GPU 会将后缓冲区和前缓冲区互换位置,所以显示器从前缓冲区读取图片,和浏览器生成新的图像到后缓冲区的过程是不同步的。
不同步会造成众多问题:掉帧、卡顿、不连贯等。
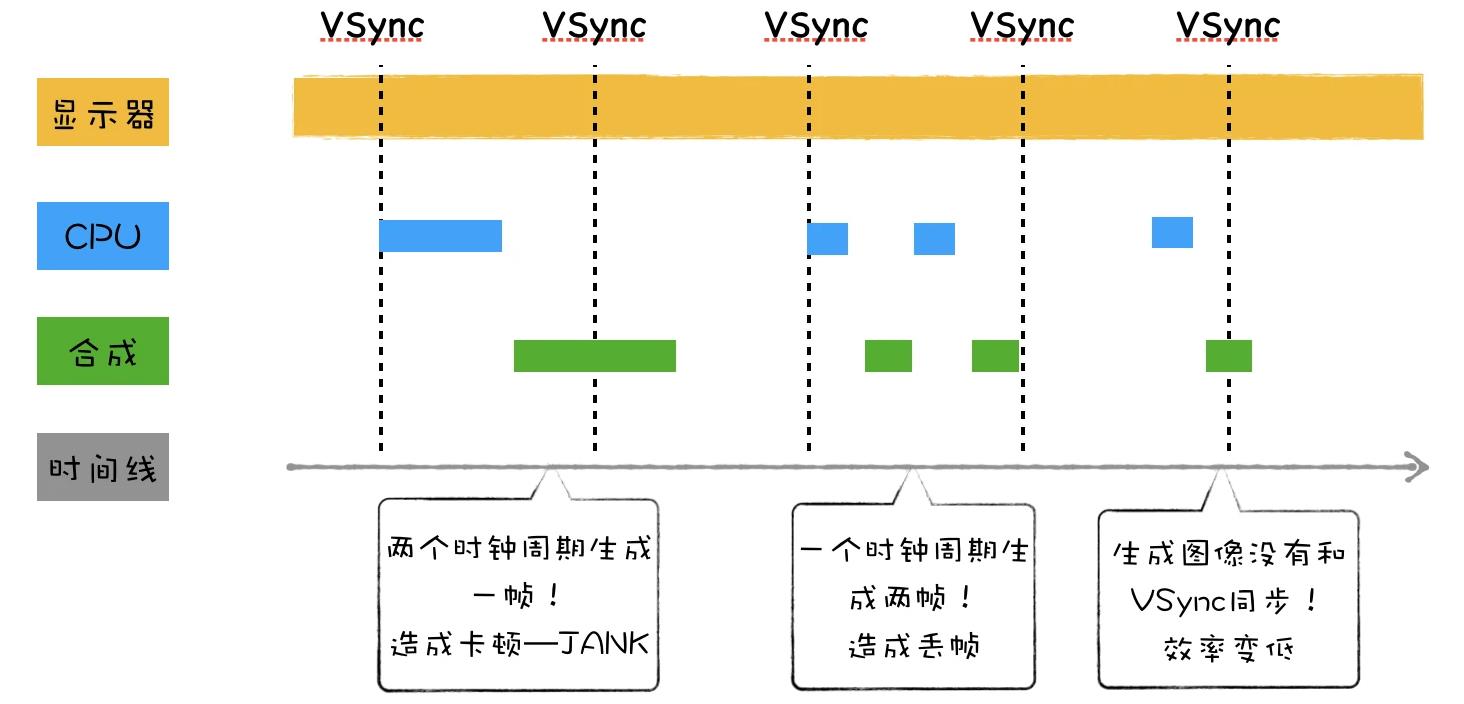
- 如果渲染进程生成的帧速比屏幕的刷新率慢,那么屏幕会在两帧中显示同一个画面,当这种断断续续的情况持续发生时,用户将会很明显地察觉到动画卡住了。
- 如果渲染进程生成的帧速率实际上比屏幕刷新率快,那么也会出现一些视觉上的问题,比如当帧速率在 100fps 而刷新率只有 60Hz 的时候,GPU 所渲染的图像并非全都被显示出来,这就会造成丢帧现象。
- 屏幕的刷新频率和 GPU 更新图片的频率一样,由于它们是两个不同的系统,所以屏幕生成帧的周期和 VSync 的周期也是很难同步起来的。
VSync 时钟周期和渲染引擎生成图片不同步问题:
解决方案:需要将显示器的时钟同步周期和浏览器生成页面的周期绑定起来。
当显示器将一帧画面绘制完成后,并在准备读取下一帧之前,显示器会发出一个垂直同步信号(vertical synchronization)给 GPU,简称 VSync。当 GPU 接收到 VSync 信号后,会将 VSync 信号同步给浏览器进程,浏览器进程再将其同步到对应的渲染进程,渲染进程接收到 VSync 信号之后,就可以准备绘制新的一帧。
绑定 VSync 时钟同步周期和浏览器生成页面周期:
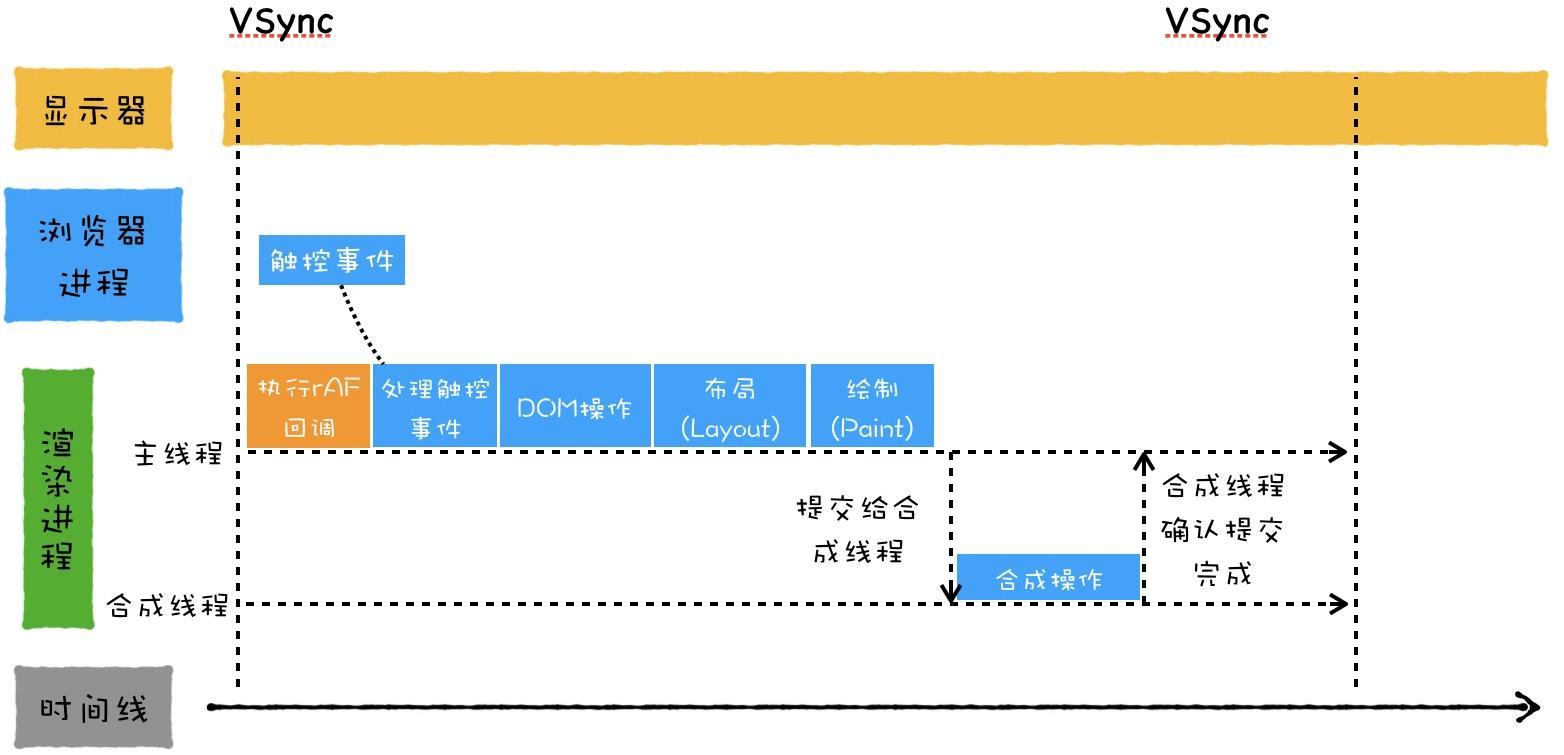
当在执行用户交互的任务时,将合成任务的优先级调整到最高。处理完成 DOM,计算好布局和绘制,就需要将信息提交给合成线程来合成最终图片了,然后合成线程进入工作状态。把下个合成任务的优先级调整为最低,并将页面解析、定时器等任务优先级提升。
在合成完成之后,合成线程会提交给渲染主线程提交完成合成的消息,如果当前合成操作执行的非常快,比如从用户发出消息到完成合成操作只花了 8 毫秒,因为 VSync 同步周期是 16.66(1/60) 毫秒,那么这个 VSync 时钟周期内就不需要再次生成新的页面了。那么从合成结束到下个 VSync 周期内,就进入了一个空闲时间阶段,那么就可以在这段空闲时间内执行一些不那么紧急的任务,比如 V8 的垃圾回收,或者通过 window.requestIdleCallback() 设置的回调任务等,都会在这段空闲时间内执行。
实现过程可以参考这篇文章:Improved vsync scheduling for Chrome on Android
拓展:HSync、VSync
这里插入一点小知识:具体可以参考:iOS 保持界面流畅的技巧
屏幕显示图像的原理
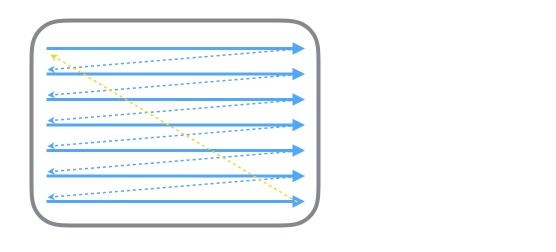
首先从过去的 CRT 显示器原理说起。
CRT 的电子枪按照上面方式,从上到下一行行扫描,扫描完成后显示器就呈现一帧画面,随后电子枪回到初始位置继续下一次扫描。
为了把显示器的显示过程和系统的视频控制器进行同步,显示器(或者其他硬件)会用硬件时钟产生一系列的定时信号。当电子枪换到新的一行,准备进行扫描时,显示器会发出一个水平同步信号(horizonal synchronization),简称 HSync;而当一帧画面绘制完成后,电子枪回复到原位,准备画下一帧前,显示器会发出一个垂直同步信号(vertical synchronization),简称 VSync。
显示器通常以固定频率进行刷新,这个刷新率就是 VSync 信号产生的频率。尽管现在的设备大都是液晶显示屏了,但原理仍然没有变。
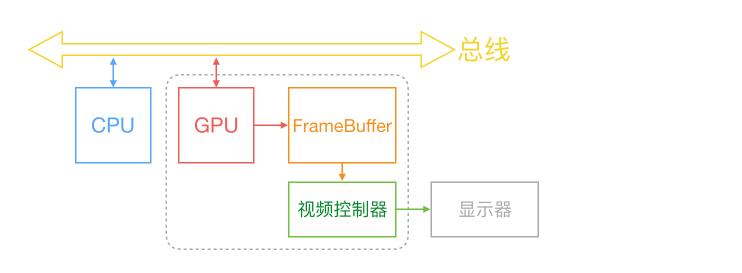
通常来说,计算机系统中 CPU、GPU、显示器是以上面这种方式协同工作的。
CPU 计算好显示内容提交到 GPU,GPU 渲染完成后将渲染结果放入帧缓冲区,随后视频控制器会按照 VSync 信号逐行读取帧缓冲区的数据,经过可能的数模转换传递给显示器显示。
在最简单的情况下,帧缓冲区只有一个,这时帧缓冲区的读取和刷新都都会有比较大的效率问题。为了解决效率问题,显示系统通常会引入两个缓冲区,即双缓冲机制。在这种情况下,GPU 会预先渲染好一帧放入一个缓冲区内,让视频控制器读取,当下一帧渲染好后,GPU 会直接把视频控制器的指针指向第二个缓冲器。如此一来效率会有很大的提升。
双缓冲虽然能解决效率问题,但会引入一个新的问题。当视频控制器还未读取完成时,即屏幕内容刚显示一半时,GPU 将新的一帧内容提交到帧缓冲区并把两个缓冲区进行交换后,视频控制器就会把新的一帧数据的下半段显示到屏幕上,造成画面撕裂现象,如下图:
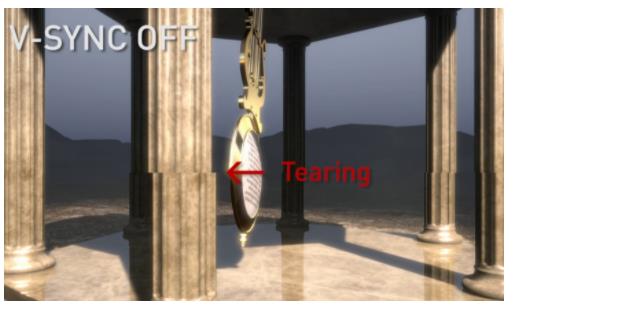
为了解决这个问题,GPU 通常有一个机制叫做垂直同步(简写也是 V-Sync),当开启垂直同步后,GPU 会等待显示器的 VSync 信号发出后,才进行新的一帧渲染和缓冲区更新。这样能解决画面撕裂现象,也增加了画面流畅度,但需要消费更多的计算资源,也会带来部分延迟。
4. 第四次迭代:任务饿死
某个状态下,一直有新的高优先级的任务加入到队列中,这样就会导致其他低优先级的任务得不到执行,这称为任务饿死。
Chromium 为了解决任务饿死的问题,给每个队列设置了执行权重,也就是如果连续执行了一定个数的高优先级的任务,那么中间会执行一次低优先级的任务,这样就缓解了任务饿死的情况。
参考资料
BlinkOn Scheduler Presentation
task_type.h 如下:
// Copyright 2017 The Chromium Authors. All rights reserved.
// Use of this source code is governed by a BSD-style license that can be
// found in the LICENSE file.
#ifndef THIRD_PARTY_BLINK_PUBLIC_PLATFORM_TASK_TYPE_H_
#define THIRD_PARTY_BLINK_PUBLIC_PLATFORM_TASK_TYPE_H_
namespace blink {
// A list of task sources known to Blink according to the spec.
// This enum is used for a histogram and it should not be re-numbered.
//
// For the task type usage guideline, see https://bit.ly/2vMAsQ4
//
// When a new task type is created:
// * use kCount value as a new value,
// * in tools/metrics/histograms/enums.xml update the
// "RendererSchedulerTaskType" enum
// * update TaskTypes.md
enum class TaskType : unsigned char {
///
// Speced tasks should use one of the following task types
///
// Speced tasks and related internal tasks should be posted to one of
// the following task runners. These task runners may be throttled.
// This value is used as a default value in cases where TaskType
// isn't supported yet. Don't use outside platform/scheduler code.
kDeprecatedNone = 0,
// https://html.spec.whatwg.org/multipage/webappapis.html#generic-task-sources
//
// This task source is used for features that react to DOM manipulations, such
// as things that happen in a non-blocking fashion when an element is inserted
// into the document.
kDOMManipulation = 1,
// This task source is used for features that react to user interaction, for
// example keyboard or mouse input. Events sent in response to user input
// (e.g. click events) must be fired using tasks queued with the user
// interaction task source.
kUserInteraction = 2,
// TODO(altimin) Fix the networking task source related namings once it is
// clear how
// all loading tasks are annotated.
// This task source is used for features that trigger in response to network
// activity.
kNetworking = 3,
// This is a part of Networking task source used to annotate tasks which are
// posted from the loading stack (i.e. WebURLLoader).
kNetworkingWithURLLoaderAnnotation = 50,
// This is a part of Networking task that should not be frozen when a page is
// frozen.
kNetworkingUnfreezable = 75,
// This task source is used for control messages between kNetworking tasks.
kNetworkingControl = 4,
// This task source is used to queue calls to history.back() and similar APIs.
kHistoryTraversal = 5,
// https://html.spec.whatwg.org/multipage/embedded-content.html#the-embed-element
// This task source is used for the embed element setup steps.
kEmbed = 6,
// https://html.spec.whatwg.org/multipage/embedded-content.html#media-elements
// This task source is used for all tasks queued in the [Media elements]
// section and subsections of the spec unless explicitly specified otherwise.
kMediaElementEvent = 7,
// https://html.spec.whatwg.org/multipage/scripting.html#the-canvas-element
// This task source is used to invoke the result callback of
// HTMLCanvasElement.toBlob().
kCanvasBlobSerialization = 8,
// https://html.spec.whatwg.org/multipage/webappapis.html#event-loop-processing-model
// This task source is used when an algorithm requires a microtask to be
// queued.
kMicrotask = 9,
// https://html.spec.whatwg.org/multipage/webappapis.html#timers
// For tasks queued by setTimeout() or setInterval().
//
// Task nesting level is < 5 and timeout is zero.
kJavascriptTimerImmediate = 72,
// Task nesting level is < 5 and timeout is > 0.
kJavascriptTimerDelayedLowNesting = 73,
// Task nesting level is >= 5.
kJavascriptTimerDelayedHighNesting = 10,
// Note: The timeout is increased to be at least 4ms when the task nesting
// level is >= 5. Therefore, the timeout is necessarily > 0 for
// kJavascriptTimerDelayedHighNesting.
// https://html.spec.whatwg.org/multipage/comms.html#sse-processing-model
// This task source is used for any tasks that are queued by EventSource
// objects.
kRemoteEvent = 11,
// https://html.spec.whatwg.org/multipage/comms.html#feedback-from-the-protocol
// The task source for all tasks queued in the [WebSocket] section of the
// spec.
kWebSocket = 12,
// https://html.spec.whatwg.org/multipage/comms.html#web-messaging
// This task source is used for the tasks in cross-document messaging.
kPostedMessage = 13,
// https://html.spec.whatwg.org/multipage/comms.html#message-ports
kUnshippedPortMessage = 14,
// https://www.w3.org/TR/FileAPI/#blobreader-task-source
// This task source is used for all tasks queued in the FileAPI spec to read
// byte sequences associated with Blob and File objects.
kFileReading = 15,
// https://www.w3.org/TR/IndexedDB/#request-api
kDatabaseAccess = 16,
// https://w3c.github.io/presentation-api/#common-idioms
// This task source is used for all tasks in the Presentation API spec.
kPresentation = 17,
// https://www.w3.org/TR/2016/WD-generic-sensor-20160830/#sensor-task-source
// This task source is used for all tasks in the Sensor API spec.
kSensor = 18,
// https://w3c.github.io/performance-timeline/#performance-timeline
kPerformanceTimeline = 19,
// https://www.khronos.org/registry/webgl/specs/latest/1.0/#5.15
// This task source is used for all tasks in the WebGL spec.
kWebGL = 20,
// https://www.w3.org/TR/requestidlecallback/#start-an-event-loop-s-idle-period
kIdleTask = 21,
// Use MiscPlatformAPI for a task that is defined in the spec but is not yet
// associated with any specific task runner in the spec. MiscPlatformAPI is
// not encouraged for stable and matured APIs. The spec should define the task
// runner explicitly.
// The task runner may be throttled.
kMiscPlatformAPI = 22,
// Tasks used for DedicatedWorker's requestAnimationFrame.
kWorkerAnimation = 51,
// Obsolete.
// kExperimentalWebSchedulingUserInteraction = 53,
// kExperimentalWebSchedulingBestEffort = 54,
// https://drafts.csswg.org/css-font-loading/#task-source
kFontLoading = 56,
// https://w3c.github.io/manifest/#dfn-application-life-cycle-task-source
kApplicationLifeCycle = 57,
// https://wicg.github.io/background-fetch/#infrastructure
kBackgroundFetch = 58,
// https://www.w3.org/TR/permissions/
kPermission = 59,
// https://w3c.github.io/ServiceWorker/#dfn-client-message-queue
kServiceWorkerClientMessage = 60,
// https://wicg.github.io/web-locks/#web-locks-tasks-source
kWebLocks = 66,
// https://w3c.github.io/screen-wake-lock/#dfn-screen-wake-lock-task-source
kWakeLock = 76,
///
// Not-speced tasks should use one of the following task types
///
// The default task type. The task may be throttled or paused.
kInternalDefault = 23,
// Tasks used for all tasks associated with loading page content.
kInternalLoading = 24,
// Tasks for tests or mock objects.
kInternalTest = 26,
// Tasks that are posting back the result from the WebCrypto task runner to
// the Blink thread that initiated the call and holds the Promise. Tasks with
// this type are posted by:
// * //components/webcrypto
kInternalWebCrypto = 27,
// Tasks to execute media-related things like logging or playback. Tasks with
// this type are mainly posted by:
// * //content/renderer/media
// * //media
kInternalMedia = 29,
// Tasks to execute things for real-time media processing like recording. If a
// task touches MediaStreamTracks, associated sources/sinks, and Web Audio,
// this task type should be used.
// Tasks with this type are mainly posted by:
// * //content/renderer/media
// * //media
// * blink/renderer/modules/webaudio
// * blink/public/platform/audio
kInternalMediaRealTime = 30,
// Tasks related to user interaction like clicking or inputting texts.
kInternalUserInteraction = 32,
// Tasks related to the inspector.
kInternalInspector = 33,
// Obsolete.
// kInternalWorker = 36,
// Translation task that freezes when the frame is not visible.
kInternalTranslation = 55,
// Tasks used at IntersectionObserver.
kInternalIntersectionObserver = 44,
// Task used for ContentCapture.
kInternalContentCapture = 61,
// Navigation tasks and tasks which have to run in order with them, including
// legacy IPCs and channel associated interfaces.
// Note that the ordering between tasks related to different frames is not
// always guaranteed - tasks belonging to different frames can be reordered
// when one of the frames is frozen.
// Note: all AssociatedRemotes/AssociatedReceivers should use this task type.
kInternalNavigationAssociated = 63,
// Tasks which should run when the frame is frozen, but otherwise should run
// in order with other legacy IPC and channel-associated interfaces.
// Only tasks related to unfreezing itself should run here, the majority of
// the tasks
// should use kInternalNavigationAssociated instead.
kInternalNavigationAssociatedUnfreezable = 64,
// Task used to split a script loading task for cooperative scheduling
kInternalContinueScriptLoading = 65,
// Experimental tasks types used for main thread scheduling postTask API
// (https://github.com/WICG/main-thread-scheduling).
// These task types should not be passed directly to
// FrameScheduler::GetTaskRunner(); they are used indirectly by
// WebSchedulingTaskQueues.
kExperimentalWebScheduling = 67,
// Tasks used to control frame lifecycle - they should run even when the frame
// is frozen.
kInternalFrameLifecycleControl = 68,
// Tasks used for find-in-page.
kInternalFindInPage = 70,
// Tasks that come in on the HighPriorityLocalFrame interface.
kInternalHighPriorityLocalFrame = 71,
// Tasks that are should use input priority task queue/runner.
kInternalInputBlocking = 77,
// Tasks related to the WebGPU API
kWebGPU = 78,
///
// The following task types are only for thread-local queues.
///
// The following task types are internal-use only, escpecially for annotations
// like UMA of per-thread task queues. Do not specify these task types when to
// get a task queue/runner.
kMainThreadTaskQueueV8 = 37,
kMainThreadTaskQueueCompositor = 38,
kMainThreadTaskQueueDefault = 39,
kMainThreadTaskQueueInput = 40,
kMainThreadTaskQueueIdle = 41,
// Removed:
// kMainThreadTaskQueueIPC = 42,
kMainThreadTaskQueueControl = 43,
// Removed:
// kMainThreadTaskQueueCleanup = 52,
kMainThreadTaskQueueMemoryPurge = 62,
kMainThreadTaskQueueNonWaking = 69,
kMainThreadTaskQueueIPCTracking = 74,
kCompositorThreadTaskQueueDefault = 45,
kCompositorThreadTaskQueueInput = 49,
kWorkerThreadTaskQueueDefault = 46,
kWorkerThreadTaskQueueV8 = 47,
kWorkerThreadTaskQueueCompositor = 48,
kCount = 79,
};
} // namespace blink
#endif // THIRD_PARTY_BLINK_PUBLIC_PLATFORM_TASK_TYPE_H_
task_queue.h 如下:
// Copyright 2018 The Chromium Authors. All rights reserved.
// Use of this source code is governed by a BSD-style license that can be
// found in the LICENSE file.
#ifndef BASE_TASK_SEQUENCE_MANAGER_TASK_QUEUE_H_
#define BASE_TASK_SEQUENCE_MANAGER_TASK_QUEUE_H_
#include <memory>
#include "base/memory/weak_ptr.h"
#include "base/single_thread_task_runner.h"
#include "base/task/common/checked_lock.h"
#include "base/task/sequence_manager/lazy_now.h"
#include "base/task/sequence_manager/tasks.h"
#include "base/task/task_observer.h"
#include "base/threading/platform_thread.h"
#include "base/time/time.h"
#include "base/trace_event/base_tracing_forward.h"
#include "third_party/abseil-cpp/absl/types/optional.h"
namespace base {
class TaskObserver;
namespace trace_event {
class BlameContext;
}
namespace sequence_manager {
namespace internal {
class AssociatedThreadId;
class SequenceManagerImpl;
class TaskQueueImpl;
} // namespace internal
class TimeDomain;
// TODO(kraynov): Make TaskQueue to actually be an interface for TaskQueueImpl
// and stop using ref-counting because we're no longer tied to task runner
// lifecycle and there's no other need for ref-counting either.
// NOTE: When TaskQueue gets automatically deleted on zero ref-count,
// TaskQueueImpl gets gracefully shutdown. It means that it doesn't get
// unregistered immediately and might accept some last minute tasks until
// SequenceManager will unregister it at some point. It's done to ensure that
// task queue always gets unregistered on the main thread.
class BASE_EXPORT TaskQueue : public RefCountedThreadSafe<TaskQueue> {
public:
class Observer {
public:
virtual ~Observer() = default;
// Notify observer that the time at which this queue wants to run
// the next task has changed. |next_wakeup| can be in the past
// (e.g. TimeTicks() can be used to notify about immediate work).
// Can be called on any thread
// All methods but SetObserver, SetTimeDomain and GetTimeDomain can be
// called on |queue|.
//
// TODO(altimin): Make it absl::optional<TimeTicks> to tell
// observer about cancellations.
virtual void OnQueueNextWakeUpChanged(TimeTicks next_wake_up) = 0;
};
// Shuts down the queue. All tasks currently queued will be discarded.
virtual void ShutdownTaskQueue();
// Shuts down the queue when there are no more tasks queued.
void ShutdownTaskQueueGracefully();
// Queues with higher priority are selected to run before queues of lower
// priority. Note that there is no starvation protection, i.e., a constant
// stream of high priority work can mean that tasks in lower priority queues
// won't get to run.
// TODO(scheduler-dev): Could we define a more clear list of priorities?
// See https://crbug.com/847858.
enum QueuePriority : uint8_t {
// Queues with control priority will run before any other queue, and will
// explicitly starve other queues. Typically this should only be used for
// private queues which perform control operations.
kControlPriority = 0,
kHighestPriority = 1,
kVeryHighPriority = 2,
kHighPriority = 3,
kNormalPriority = 4, // Queues with normal priority are the default.
kLowPriority = 5,
// Queues with best effort priority will only be run if all other queues are
// empty.
kBestEffortPriority = 6,
// Must be the last entry.
kQueuePriorityCount = 7,
kFirstQueuePriority = kControlPriority,
};
// Can be called on any thread.
static const char* PriorityToString(QueuePriority priority);
// Options for constructing a TaskQueue.
struct Spec {
explicit Spec(const char* name) : name(name) {}
Spec SetShouldMonitorQuiescence(bool should_monitor) {
should_monitor_quiescence = should_monitor;
return *this;
}
Spec SetShouldNotifyObservers(bool run_observers) {
should_notify_observers = run_observers;
return *this;
}
// Delayed fences require Now() to be sampled when posting immediate tasks
// which is not free.
Spec SetDelayedFencesAllowed(bool allow_delayed_fences) {
delayed_fence_allowed = allow_delayed_fences;
return *this;
}
Spec SetTimeDomain(TimeDomain* domain) {
time_domain = domain;
return *this;
}
const char* name;
bool should_monitor_quiescence = false;
TimeDomain* time_domain = nullptr;
bool should_notify_observers = true;
bool delayed_fence_allowed = false;
};
// TODO(altimin): Make this private after TaskQueue/TaskQueueImpl refactoring.
TaskQueue(std::unique_ptr<internal::TaskQueueImpl> impl,
const TaskQueue::Spec& spec);
TaskQueue(const TaskQueue&) = delete;
TaskQueue& operator=(const TaskQueue&) = delete;
// Information about task execution.
//
// Wall-time related methods (start_time, end_time, wall_duration) can be
// called only when |has_wall_time()| is true.
// Thread-time related mehtods (start_thread_time, end_thread_time,
// thread_duration) can be called only when |has_thread_time()| is true.
//
// start_* should be called after RecordTaskStart.
// end_* and *_duration should be called after RecordTaskEnd.
class BASE_EXPORT TaskTiming {
public:
enum class State { NotStarted, Running, Finished };
enum class TimeRecordingPolicy { DoRecord, DoNotRecord };
TaskTiming(bool has_wall_time, bool has_thread_time);
bool has_wall_time() const { return has_wall_time_; }
bool has_thread_time() const { return has_thread_time_; }
base::TimeTicks start_time() const {
DCHECK(has_wall_time());
return start_time_;
}
base::TimeTicks end_time() const {
DCHECK(has_wall_time());
return end_time_;
}
base::TimeDelta wall_duration() const {
DCHECK(has_wall_time());
return end_time_ - start_time_;
}
base::ThreadTicks start_thread_time() const {
DCHECK(has_thread_time());
return start_thread_time_;
}
base::ThreadTicks end_thread_time() const {
DCHECK(has_thread_time());
return end_thread_time_;
}
base::TimeDelta thread_duration() const {
DCHECK(has_thread_time())<以上是关于浏览器原理 37 # 任务调度:有了setTimeOut,为什么还要使用 requestAnimationFrame?的主要内容,如果未能解决你的问题,请参考以下文章