现代控制理论基础一线性系统的状态空间描述
Posted AXYZdong
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了现代控制理论基础一线性系统的状态空间描述相关的知识,希望对你有一定的参考价值。
Author:AXYZdong 自动化专业 工科男
有一点思考,有一点想法,有一点理性!
定个小小目标,努力成为习惯!在最美的年华遇见更好的自己!
CSDN@AXYZdong,CSDN首发,AXYZdong原创
唯一博客更新的地址为: 👉 AXYZdong的博客 👈
B站主页为:AXYZdong的个人主页
文章目录
1.1 状态空间分析法
- 状态变量
一 组 变 量 → { 1 、 足 以 完 全 确 定 系 统 运 动 状 态 2 、 个 数 又 是 最 小 一组变量 \\to \\begin{cases} 1、足以完全确定系统运动状态 \\\\ 2、个数又是最小 \\end{cases} 一组变量→{1、足以完全确定系统运动状态2、个数又是最小
性 质 : { 1 、 x t = t 0 2 、 t ≥ t 0 时 刻 的 输 入 I t → 完 全 确 定 在 任 何 t ≥ t 0 时 刻 的 状 态 x t 性质: \\begin{cases} 1、x_{t=t_0} \\\\ 2、t \\geq t_0 时刻的输入I_t \\end{cases} \\to完全确定在任何t \\geq t_0 时刻的状态 x_t 性质:{1、xt=t02、t≥t0时刻的输入It→完全确定在任何t≥t0时刻的状态xt
类似于函数: x t = f ( x t 0 , I t ) x_t=f(x_{t_0},I_t) xt=f(xt0,It) - 状态矢量
如果 n n n 个状态变量用 x 1 ( t ) , x 2 ( t ) , . . . , x n ( t ) x_1(t),x_2(t),...,x_n(t) x1(t),x2(t),...,xn(t) 表示,并把这些状态变量看作是矢量 x ( t ) x(t) x(t) 的分量,则称 x ( t ) x(t) x(t)为状态矢量,记作:
x ( t ) = ( x 1 ( t ) x 2 ( t ) ⋮ x n ( t ) ) x(t)=\\begin{pmatrix} x_1(t) \\\\ x_2(t)\\\\ \\vdots \\\\ x_n(t) \\\\ \\end{pmatrix} x(t)=⎝⎜⎜⎜⎛x1(t)x2(t)⋮xn(t)⎠⎟⎟⎟⎞ - 状态空间
以状态变量用 x 1 ( t ) , x 2 ( t ) , . . . , x n ( t ) x_1(t),x_2(t),...,x_n(t) x1(t),x2(t),...,xn(t) 为坐标轴所构成的 n n n 维空间,称为状态空间。 - 状态方程
由系统的状态变量构成的一阶微分方程组称为系统的状态空间。
例:以
R
−
L
−
C
R-L-C
R−L−C 电路说明如何用状态变量描述系统
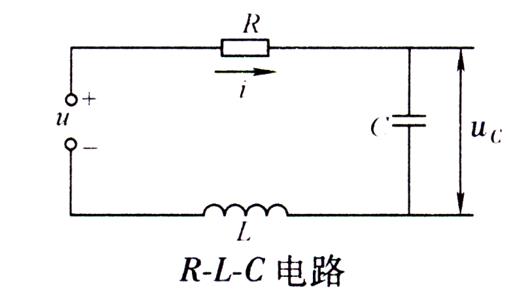
▲ 图1
有
一
阶
微
分
方
程
组
:
{
C
⋅
d
u
c
d
t
=
i
L
⋅
d
i
d
t
+
R
i
+
u
c
=
u
⟹
{
u
ˊ
c
=
1
C
⋅
i
i
ˊ
=
−
1
L
u
c
−
R
L
i
+
1
L
u
(1)
有一阶微分方程组: \\begin{cases} C\\cdot\\frac{du_c}{dt}=i \\\\[2ex] L\\cdot\\frac{di}{dt}+Ri+u_c=u \\end{cases} \\implies \\begin{cases} \\acute{u}_c=\\frac{1}{C}\\cdot i \\\\[2ex] \\acute{i}=-\\frac{1}{L}u_c-\\frac{R}{L}i+\\frac{1}{L}u \\end{cases} \\tag1
有一阶微分方程组:⎩⎨⎧C⋅dtduc=iL⋅dtdi+Ri+uc=u⟹⎩⎨⎧uˊc=C1⋅iiˊ=−L1uc−LRi+L1u(1)
令
{
x
1
=
u
c
x
2
=
i
⟹
(
x
1
ˊ
x
2
ˊ
)
=
(
0
1
C
−
1
L
−
R
L
)
(
x
1
x
2
)
+
(
0
1
L
)
u
(2)
令 \\begin{cases} x_1=u_c \\\\[2ex] x_2=i \\end{cases} \\implies \\begin{pmatrix} \\acute{x_1}\\\\[2ex] \\acute{x_2}\\\\ \\end{pmatrix} = \\begin{pmatrix} 0 & \\large\\frac{1}{C}\\\\[2ex] \\large-\\frac{1}{L} & \\large-\\frac{R}{L}\\\\ \\end{pmatrix} \\begin{pmatrix} x_1\\\\[2ex] x_2\\\\ \\end{pmatrix} + \\begin{pmatrix} 0\\\\[2ex] \\large\\frac{1}{L}\\\\ \\end{pmatrix}u \\tag2
令⎩⎨⎧x1=u