现代控制理论基础四控制系统的稳定性
Posted AXYZdong
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了现代控制理论基础四控制系统的稳定性相关的知识,希望对你有一定的参考价值。
Author:AXYZdong 自动化专业 工科男
有一点思考,有一点想法,有一点理性!
定个小小目标,努力成为习惯!在最美的年华遇见更好的自己!
CSDN@AXYZdong,CSDN首发,AXYZdong原创
唯一博客更新的地址为: 👉 AXYZdong的博客 👈
B站主页为:AXYZdong的个人主页
文章目录
4.1 李雅普诺夫关于稳定性的定义
设所研究系统的齐次状态方程为:
x
ˊ
=
f
(
x
,
t
)
(1)
\\acute{x}=f(x,t) \\tag 1
xˊ=f(x,t)(1)
式中,
x
x
x 为
n
n
n 维状态矢量;
f
f
f 为与
x
x
x 同维的矢量函数,它是
x
x
x 各元素
x
1
,
x
2
,
⋯
,
x
n
x_1,x_2,\\cdots,x_n
x1,x2,⋯,xn 和时间
t
t
t 的函数。
设方程式(1)在给定初始条件 ( t 0 , x 0 ) (t_0,x_0) (t0,x0) 下,有唯一解: x = ϕ ( t ; x 0 , t 0 ) (2) x=\\phi(t;x_0,t_0) \\tag 2 x=ϕ(t;x0,t0)(2)
式(2)实际上描述了系统式(1)在 n n n 维状态空间中从初始条件 ( t 0 , x 0 ) (t_0,x_0) (t0,x0) 出发的一条状态运动的轨迹,简称系统的运动或 状态轨迹。
若式(1)存在状态矢量
x
e
x_e
xe ,对所有
t
t
t,都使
f
(
x
e
,
t
)
≡
0
f(x_e,t)\\equiv0
f(xe,t)≡0
成立,则
x
e
x_e
xe 称为系统的平衡状态。
- 李雅普诺夫意义下稳定
如果方程式(1)描述的系统对于任意选定的实数 ϵ > 0 \\epsilon >0 ϵ>0 ,都对应存在另一实数 δ ( ϵ , t 0 ) > 0 \\delta ( \\epsilon , t_0) >0 δ(ϵ,t0)>0,使当 ∣ ∣ x 0 − x e ∣ ∣ ≤ δ ( ϵ , t 0 ) ||x_0-x_e||\\leq\\delta(\\epsilon,t_0) ∣∣x0−xe∣∣≤δ(ϵ,t0)
时,从任意初态 x 0 x_0 x0 出发的解都满足:
∣ ∣ ϕ ( t ; x 0 , t 0 ) − x e ∣ ∣ ≤ ϵ , t 0 ≤ t < ∞ ||\\phi(t;x_0,t_0)-x_e||\\leq\\epsilon,t_0\\leq t< \\infty ∣∣ϕ(t;x0,t0)−xe∣∣≤ϵ,t0≤t<∞
则称平衡状态 x e x_e xe 为李雅普诺夫意义下稳定。 其中实数 δ \\delta δ 与 ϵ \\epsilon ϵ 有关,一般情况下也与 t 0 t_0 t0 有关。如果 δ \\delta δ 与 t 0 t_0 t0 无关,则称这种平衡状态是一致稳定的。
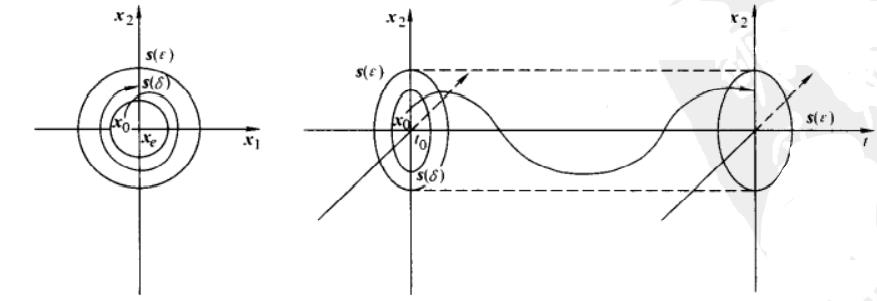
▲ 稳定的平衡状态及其状态轨线
- 渐进稳定
如果平衡状态 x e x_e xe 是稳定的,而且当 t t t 无限增长时,轨线不仅不超出 s ( ϵ ) s(\\epsilon) s(ϵ) ,而且最终收敛于 x e x_e xe ,则称这种平衡状态 x e x_e xe 渐近稳定 。
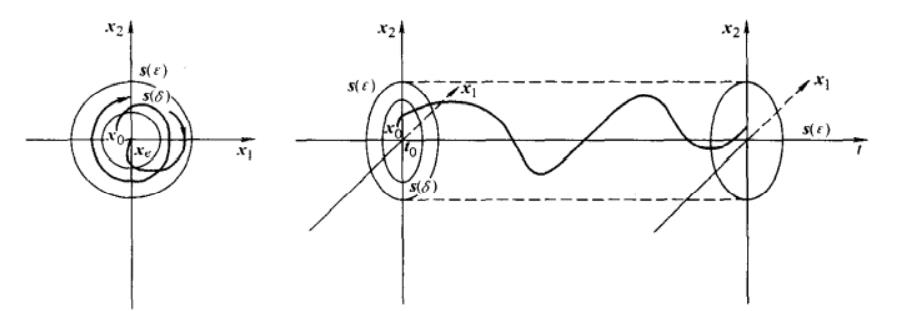
▲ 渐进稳定的平衡状态及其状态轨线
- 大范围渐进稳定
如果平衡状态 x e x_e xe 是稳定的,而且从状态空间中所有初始状态出发的轨线都具有渐近稳定性,则称这种平衡状态 x e x_e xe 大范围渐进稳定。 - 不稳定
如果对于某个实数 ϵ > 0 \\epsilon>0 ϵ>0 和任一实数 δ > 0 δ >0 δ>0 ,不管 δ \\delta δ 这个实数多么小,由 s ( δ ) s(\\delta) s(δ) 内出发的状态轨线,至少有一个轨线越过 s ( ϵ ) s(\\epsilon) s(ϵ) ,则称这种平衡状态 x e x_e xe 不稳定。
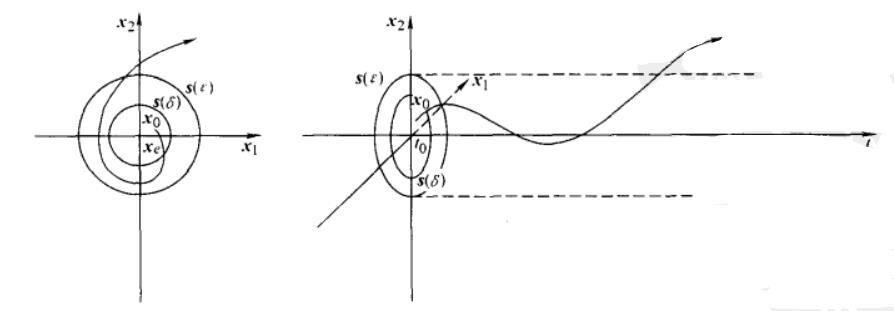
▲不稳定的平衡状态及其状态轨线
- 如果
x
(
t
)
x( t )
x(t) 有界,则称
x
e
x_e
xe 稳定 。如果
x
(
t
)
x( t)
x(t) 不仅有界而
lim
t
→
∞
x
(
t
)
=
0
\\lim_{t\\to \\infty} x(t) = 0
limt→∞x(t)=0,收敛于原点,则称
x
e
x_e
xe 渐近稳定。 如桌
x
(
t
)
x(t)
x(t) 为无界,则称
x
e
x_e
xe 不稳定。
在经典控制理论中,只有渐进稳定的系统才称作稳定系统。 只在李雅普诺夫意义下稳定,但不是渐近稳定的系统则称临界稳定系统,这在工程上属于不稳定系统。
4.2 李雅普诺夫第一法(间接法)
- (状态稳定性)线性定常系统
∑
:
(
A
,
b
,
c
)
\\sum:(A,b,c)
∑:(A,b,c)
x ˊ = A x + b u y = c x \\acute{x}=Ax+bu\\\\ y=cx xˊ=Ax+buy=cx
平衡状态 x e x_e xe 渐进稳定的充要条件是矩阵 A A A 的所有特征值均具有负实部。 - (输出稳定性)线性定常系统
∑
:
(
A
,
b
,
c
)
\\sum:(A,b,c)
∑:(A,b,c) 输出稳定的充要条件是其传递函数:
W ( s ) = c ( s I − A ) − 1 b W(s)=c(sI-A)^{-1}b W(s)=c(sI−A)−1b
的极点全部位于 s s s 的左半平面。
4.3 李雅普诺夫第二法
- 定理:
设系统状态方程为 x ˊ = f ( x ) \\acute{x}=f(x)