视觉SLAM十四讲笔记-第一讲
Posted 陈鹏烨
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了视觉SLAM十四讲笔记-第一讲相关的知识,希望对你有一定的参考价值。
第一讲:课后习题
1. 有线性方程 Ax = b,若已知 A,b,需要求解x,该如何求解? 这对 A 和 b 有哪些要求? 【提示:从A的维度和秩角度来分析】
答:可以利用大学时候学的非齐次方程组的方法求解,利用 A 的增广矩阵  ,对增广矩阵进行标准化和归一化。
,对增广矩阵进行标准化和归一化。
A的增广矩阵是:
![\\widetilde{A}= \\left[ \\begin{array}{cccc|c} a_{11} & a_{12} & ... & a_{1n} & b_{1} \\\\ a_{21} & a_{22} & ... & a_{2n} & b_{1} \\\\ ... & ... & ... & a_{1n} & ... \\\\ a_{m1} & a_{m2} & ... & a_{mn} & b_{m} \\end{array} \\right]](https://image.cha138.com/20210703/91ff9e5182d548a384c7968e4ccd9321.jpg%3D%20%5Cleft%5B%20%5Cbegin%7Barray%7D%7Bcccc%7Cc%7D%20a_%7B11%7D%20%26%20a_%7B12%7D%20%26%20...%20%26%20a_%7B1n%7D%20%26%20b_%7B1%7D%20%5C%5C%20a_%7B21%7D%20%26%20a_%7B22%7D%20%26%20...%20%26%20a_%7B2n%7D%20%26%20b_%7B1%7D%20%5C%5C%20...%20%26%20...%20%26%20...%20%26%20a_%7B1n%7D%20%26%20...%20%5C%5C%20a_%7Bm1%7D%20%26%20a_%7Bm2%7D%20%26%20...%20%26%20a_%7Bmn%7D%20%26%20b_%7Bm%7D%20%5Cend%7Barray%7D%20%5Cright%5D)
- rank(A)<rank(A~) , 方程组 (2) 无解
- rank(A)=rank(A~)=n , 方程组 (2) 有唯一解
- rank(A)=rank(A~)<n , 方程组 (2) 有无穷解
- rank(A)>rank(A~) 不可能出现, 因为增广矩阵的秩大于等于系数矩阵的秩(矩阵加入一列,其秩只能增大,不可能变小)
需要补充线性代数的同学可以参考这个同学:https://blog.csdn.net/youngpan1101/article/details/54574130
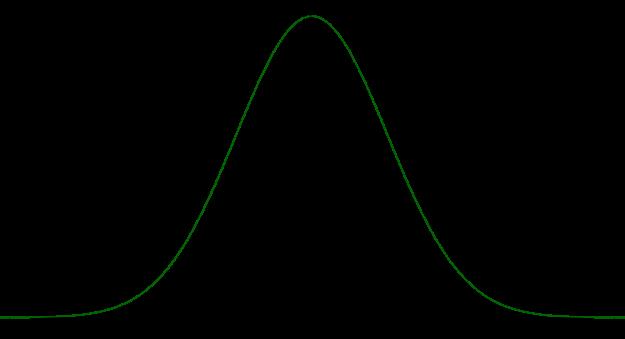
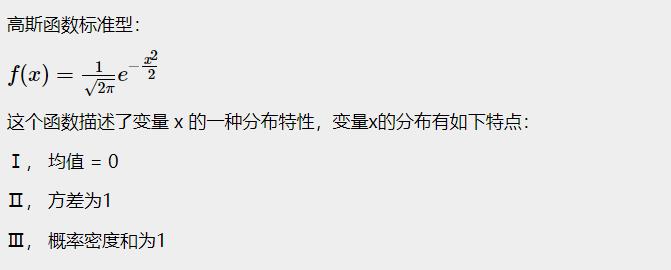
2.高斯分布是什么?它的一维形式是什么样子?它的高维形式是什么样子?
答:高斯分布(Gaussian distribution),也称正态分布(Normal distribution),最早由棣莫弗(Abraham de Moivre)在求二项分布的渐近公式中得到。C.F.高斯在研究测量误差时从另一个角度导出了它。P.S.拉普拉斯和高斯研究了它的性质。是一个在数学、物理及工程等领域都非常重要的概率分布,在统计学的许多方面有着重大的影响力。
正态曲线呈钟型,两头低,中间高,左右对称因其曲线呈钟形,因此人们又经常称之为钟形曲线。
若随机变量X服从一个数学期望为μ、方差为σ2的正态分布,记为N(μ,σ2)。其概率密度函数为正态分布的期望值μ决定了其位置,其标准差σ决定了分布的幅度。当μ = 0,σ = 1时的正态分布是标准正态分布。如下图:
高斯
https://www.cnblogs.com/bingjianing/p/9117330.html
3.你知道C++中的类吗?你知道STL吗?你使用过它们吗?
4. 你以前怎样书写CH++程序?(你完全可以说只在Visual C++6.0下写过CH+工程只要你有写C++和C语言的经验就行。)
5.你知道C++11标准吗?你听说过或用过其中哪些新特性?有没有其他的标准
6. 你知道Linux吗?你有没有至少使用过一种(不算安卓)操作系统,比如 Ubuntu?
7. Linux的目录结构是什么样的?你知道哪些基本命令,比如 Is,cat等?
8.如何在 Ubuntu系统中安装软件(不打开软件中心的情况下)?这些软件被安装在什么地方?如果只知道模糊的软件名称(比如想要装一个名称中含有Eigen 的库),应该如何安装它?
9.*花一个小时学习Vim,因为你迟早会用它。你可以在终端中输入vimtutor阅读一遍所有内容。我们不需要你非常熟练地操作它,只要能够在学习本书的过程中使用它输入代码即可。不要在它的插件上浪费时间,不要想着把Vim用成 IDE,我们只用它做文本编辑的工作。
以上是关于视觉SLAM十四讲笔记-第一讲的主要内容,如果未能解决你的问题,请参考以下文章