路径规划基于改进动态窗口DWA算法机器人静态避障matlab源码
Posted 博主QQ2449341593
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了路径规划基于改进动态窗口DWA算法机器人静态避障matlab源码相关的知识,希望对你有一定的参考价值。
一、简介
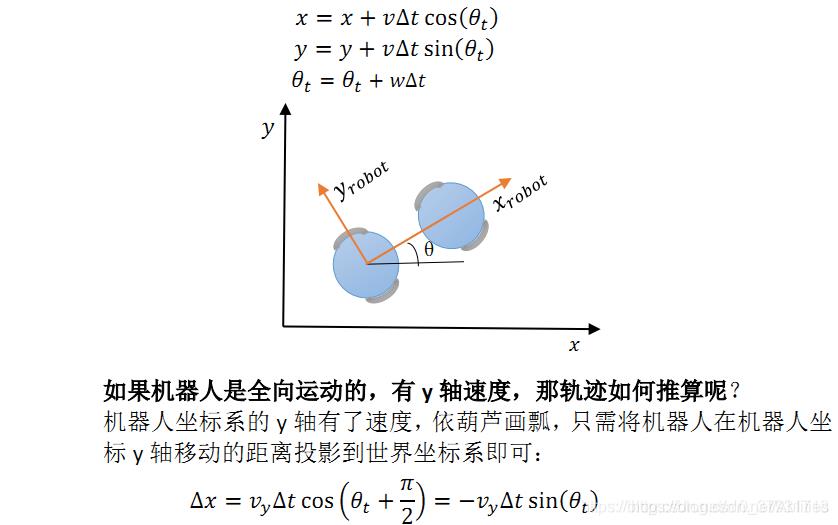
DWA算法全称为dynamic window approach,其原理主要是在速度空间(v,w)中采样多组速度,并模拟这些速度在一定时间内的运动轨迹,再通过一个评价函数对这些轨迹打分,最优的速度被选择出来发送给下位机。
1 原理分析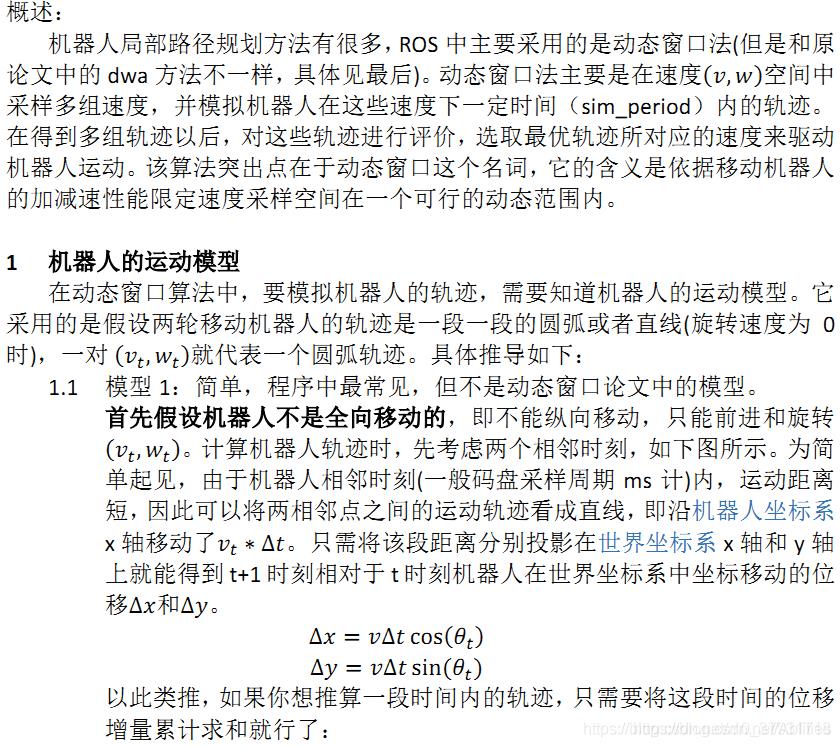
2 速度采样
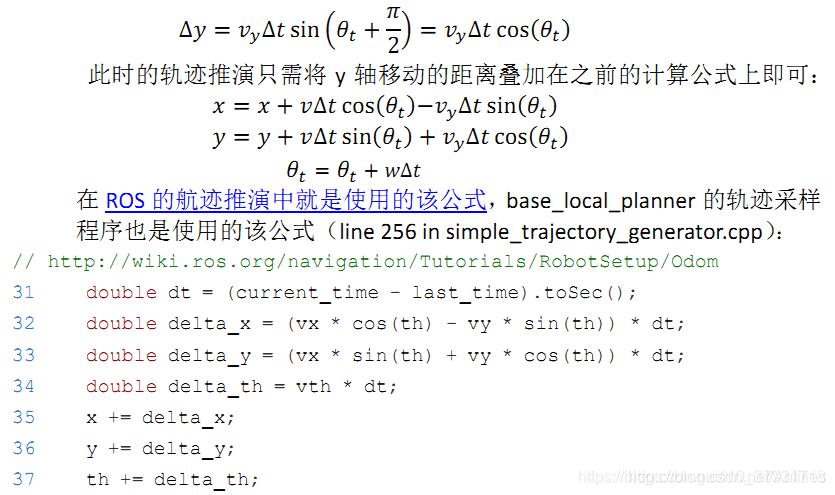
机器人的轨迹运动模型有了,根据速度就可以推算出轨迹。
因此只需采样很多速度,推算轨迹,然后评价这些轨迹好不好就行了。
(一)移动机器人受自身最大速度最小速度的限制
(二) 移动机器人受电机性能的影响:由于电机力矩有限,存在最大的加減速限制,因此移动机器人軌迹前向模拟的周期sim_period内,存在一个动态窗口,在该窗口内的速度是机器人能够实际达到的速度:
(三) 基于移动机器人安全的考虑:为了能够在碰到障碍物前停下来, 因此在最大减速度条件下, 速度有一个范围。
二、源代码
% -------------------------------------------------------------------------
function [] = ADynamicWindowApproachSample()
close all;
clear all;
disp('Dynamic Window Approach sample program start!!')
x=[0 0 pi/2 0 0]';% 机器人的初期状态[x(m),y(m),yaw(Rad),v(m/s),w(rad/s)]
goal=[12,5];% 目标点位置 [x(m),y(m)]
% 障碍物位置列表 [x(m) y(m)]
% obstacle=[0 2;
% 4 2;
% 4 4;
% 5 4;
% 5 5;
% 5 6;
% 5 9
% 8 8
% 8 9
% 7 9];
obstacle=[-0.9 2;
-0.8 2;
-0.7 2;
-0.6 2;
-0.4 2;
-0.2 2;
-0.1 2;
0 2;
0 2.1;
0 2.2;
0 2.3;
0 2.4;
0 2.5;
0 2.6;
0 2.7;
0 2.8;
0 2.9;
0 3;
0 3.1;
0 3.2;
0 3.3;
0 3.4;
0 3.5;
0 3.6;
0 3.7;
0 3.8;
0 3.9;
0 4;
0 4.1;
0 4.2;
0 4.3;
0 4.4;
0 4.5;
0 4.6;
0 4.7;
0 4.8;
0 4.9;
0 5;
0 5.1;
0 5.2;
0 5.3;
0 5.4;
0 5.5;
0 5.6;
0 5.7;
0 5.8;
0 5.9;
0 6;
-0.1 6;
-0.2 6;
-0.3 6;
-0.4 6;
-0.5 6;
-0.6 6;
-0.7 6;
-0.8 6;
-0.9 6;
2 2;%U型障碍物开始
2 2.1;
2 2.2;
2 2.3;
2 2.4;
2 2.5;
2 2.6;
2 2.7;
2 2.8;
2 2.9;
2 3;
2 3;%U型障碍物封口开始
2 3.1;
2 3.2;
2 3.3;
2 3.4;
2 3.5;
2 3.6;
2 3.7;
2 3.8;
2 3.9;
2 4;
2 4;
2 4.1;
2 4.2;
2 4.3;
2 4.4;
2 4.5;
2 4.6;
2 4.7;
2 4.8;
2 4.9;
2 5;
2 5;
2 5.1;
2 5.2;
2 5.3;
2 5.4;
2 5.5;
2 5.6;
2 5.7;
2 5.8;
2 5.9;
2 6;
2 5;
2 6.1;
2 6.2;
2 6.3;
2 6.4;
2 6.5;
2 6.6;
2 6.7;
2 6.8;
2 6.9;
2 7;
2 7.1;
2 7.2;
2 7.3;
2 7.4;
2 7.5;
2 7.6;
2 7.7;
2 7.8;
2 7.9;
2 8;
% 6 3;
% 6 3.1;
% 6 3.2;
% 6 3.3;
% 6 3.4;
% 6 3.5;
% 6 3.6;
% 6 3.7;
% 6 3.8;
% 6 3.9;
% 6 4;
% 6 4.1;
% 6 4.2;
% 6 4.3;
% 6 4.4;
% 6 4.5;
% 6 4.6;
% 6 4.7;
% 6 4.8;
% 6 4.9;
% 6 5;
% 6 5.1;
% 6 5.2;
% 6 5.3;
% 6 5.4;
% 6 5.5;
% 6 5.6;
% 6 5.7;
% 6 5.8;
% 6 5.9;
% 6 6;
% 6 6.1;
% 6 6.2;
% 6 6.3;
% 6 6.4;
% 6 6.5;
% 6 6.6;
% 6 6.7;
% 6 6.8;
% 6 6.9;
% 6 7;
7 2;
7 2.1;
7 2.2;
7 2.3;
7 2.4;
7 2.5;
7 2.6;
7 2.7;
7 2.8;
7 2.9;
7 3;
7 3.1;
7 3.2;
7 3.3;
7 3.4;
7 3.5;
7 3.6;
7 3.7;
7 3.8;
7 3.9;
7 4;
7 4.1;
7 4.2;
7 4.3;
7 4.4;
7 4.5;
7 4.6;
7 4.7;
7 4.8;
7 4.9;
7 5;
7 5.1;
7 5.2;
7 5.3;
7 5.4;
7 5.5;
7 5.6;
7 5.7;
7 5.8;
7 5.9;
7 6;
7 6.1;
7 6.2;
7 6.3;
7 6.4;
7 6.5;
7 6.6;
7 6.7;
7 6.8;
7 6.9;
7 7;
7 7.1;
7 7.2;
7 7.3;
7 7.4;
7 7.5;
7 7.6;
7 7.7;
7 7.8;
7 7.9;
7 8;
2 8;
2.1 8;
2.2 8;
2.3 8;
2.4 8;
2.5 8;
2.6 8;
2.7 8;
2.8 8;
2.9 8;
3 8;
3.1 8;
3.2 8;
3.3 8;
3.4 8;
3.5 8;
3.6 8;
3.7 8;
3.8 8;
3.9 8;
4 8;
4.1 8;
4.2 8;
4.3 8;
4.4 8;
4.5 8;
4.6 8;
4.7 8;
4.8 8;
4.9 8;
5 8;
5.1 8;
5.2 8;
5.3 8;
5.4 8;
5.5 8;
5.6 8;
5.7 8;
5.8 8;
5.9 8;
6 8;
6.1 8;
6.2 8;
6.3 8;
6.4 8;
6.5 8;
6.6 8;
6.7 8;
6.8 8;
6.9 8;
7 8;
2 2;
2.1 2;
2.2 2;
2.3 2;
2.4 2;
2.5 2;
2.6 2;
2.7 2;
2.8 2;
2.9 2;
3 2;
3.1 2;
3.2 2;
3.3 2;
3.4 2;
3.5 2;
3.6 2;
3.7 2;
3.8 2;
3.9 2;
4 2;
4.1 2;
4.2 2;
4.3 2;
4.4 2;
4.5 2;
4.6 2;
4.7 2;
4.8 2;
4.9 2;
5 2;
5.1 2;
5.2 2;
5.3 2;
5.4 2;
5.5 2;
5.6 2;
5.7 2;
5.8 2;
5.9 2;
6 2;
6.1 2;
6.2 2;
6.3 2;
6.4 2;
6.5 2;
6.6 2;
6.7 2;
6.8 2;
6.9 2;
7 2;
2 3;
% 2.1 3;
% 2.2 3;
% 2.3 3;
% 2.4 3;
% 2.5 3;
% 2.6 3;
% 2.7 3;
% 2.8 3;
% 2.9 3;
% 3 3;
% 3.1 3;
% 3.2 3;
% 3.3 3;
% 3.4 3;
% 3.5 3;
% 3.6 3;
% 3.7 3;
% 3.8 3;
% 3.9 3;
% 4 3;
% 4.1 3;
% 4.2 3;
% 4.3 3;
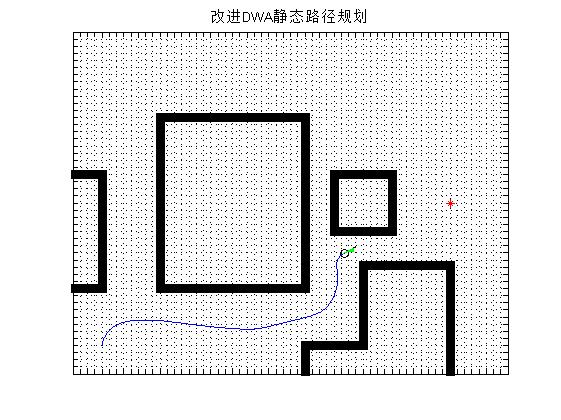
三、运行结果
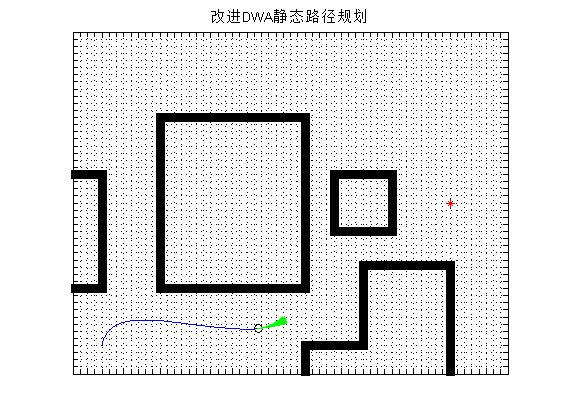
四、备注
完整代码或者仿真咨询添加QQ2449341593
以上是关于路径规划基于改进动态窗口DWA算法机器人静态避障matlab源码的主要内容,如果未能解决你的问题,请参考以下文章