机器人编程趣味实践19-武林秘籍(文档)
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了机器人编程趣味实践19-武林秘籍(文档)相关的知识,希望对你有一定的参考价值。
机器人技术快速发展,教程等迭代速度非常快,周期在1-2年,新生期都是如此,进入成熟期会好很多,文档迭代周期会延长至3-5年。至于那些经典技术通常生命周期长达10年或更久。
在开启本文之前,推荐一篇:
基础篇
之前,机器人操作系统编程文档,查阅wiki,后来官方作了大量调整和更新,如下所示:
网址为docs.ros.org。推荐为ROS 1 Noetic和ROS 2 Galactic,ROS1最终版和ROS2最新版。
ROS2还在快速研发中。打开ROS2稳定版(Foxy)可以看到:

这文档比ROS1要规范很多。在完成Tutorials学习之后,通常会进入两个主题:
- Navigation2
- MoveIt2
移动机器人
如上为旧版案例,最新版案例即将更新(ROS 2 Foxy)。

- navigation.ros.org
已经更新,并且默认文档为ROS 2 Foxy
Nav2 项目是 ROS 导航堆栈的精神继承者。 该项目旨在寻找一种安全的方式让移动机器人从 A 点移动到 B 点。它也可以应用于其他涉及机器人导航的应用,例如跟踪动态点。 这将完成动态路径规划、计算电机速度、避开障碍物和结构恢复行为。 了解本项目的相关项目、机器人使用、ROS1对比、维护者等更多信息,请参见关于和联系方式。
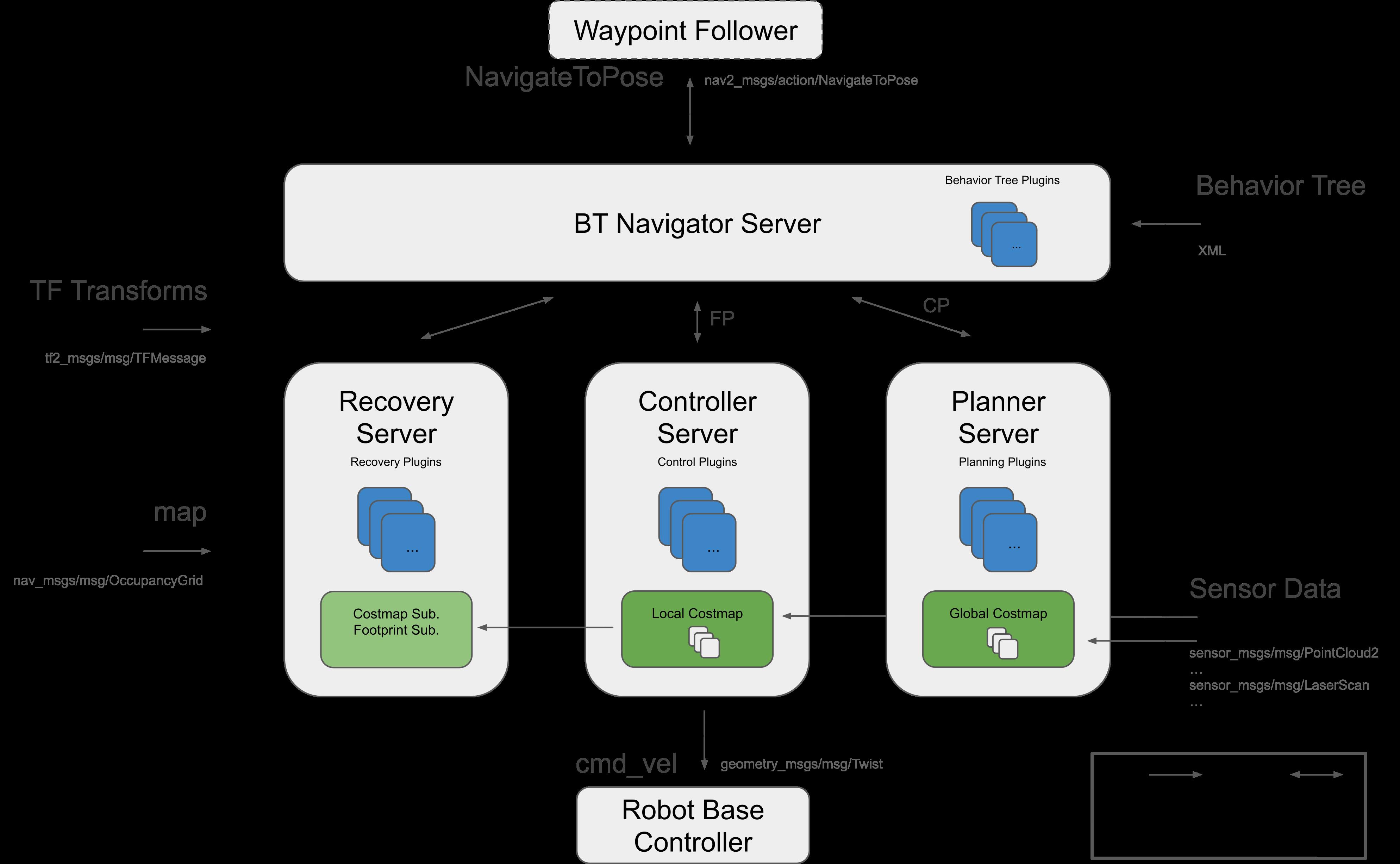
Nav2 使用行为树调用模块化服务器来完成一次行动。 行动可以是计算路径、控制工作、恢复或任何其他与导航相关的动作。 这些都是通过 ROS 操作服务器与行为树 (BT) 通信的独立节点。 下图将对 Nav2 的结构有一个很好的初步了解。 注意:可以在每个服务器中为控制器、规划器和恢复使用多个插件,并使用匹配的 BT 插件。 这可用于创建上下文导航行为。 如果想查看此项目与 ROS (1) Navigation 之间的比较,请参阅 ROS to ROS 2 Navigation。
Nav2 的预期输入是符合 REP-105 的 TF 转换、使用静态成本地图层的地图源、BT XML 文件和任何相关的传感器数据源。然后它将为完整或非完整机器人的电机提供有效的速度命令以跟随。目前支持所有主要的机器人类型:完整、差分驱动、腿式和阿克曼(类汽车)基本类型!通过圆形和任意形状的机器人为 SE2 碰撞检查提供独特的支持。
具有以下工具:
- 加载、提供和存储地图(地图服务器)
- 在地图上定位机器人 (AMCL)
- 围绕障碍物规划从 A 到 B 的路径(Nav2 Planner)
- 控制机器人跟随路径(Nav2 Controller)
- 将传感器数据转换为世界的成本地图表示(Nav2 Costmap 2D)
- 使用行为树(Nav2 行为树和 BT Navigator)构建复杂的机器人行为
- 发生故障时计算恢复行为(Nav2 Recoveries)
- 跟随顺序航点(Nav2 Waypoint Follower)
- 管理服务器的生命周期和看门狗 (Nav2 Lifecycle Manager)
- 启用自定义算法和行为的插件(Nav2 Core)
Nav2还提供了一组启动插件来帮助前进。 NavFn 使用 A* 或 Dijkstra 算法计算从初始位置到目标姿势的最短路径。 DWB 将使用 DWA 算法计算跟踪路径的控制工作,并为轨迹比较器提供几个自定义插件。 恢复行为包括:等待、旋转、清除代价地图和备份。 有一组BT插件用于调用这些服务器和计算条件。 最后,还有一组用于与堆栈交互和控制生命周期的 Rviz 插件。 可以在导航插件上找到所有用户报告的插件的列表。
这里是关于如何安装和使用 Nav2 与示例机器人 Turtlebot 3 (TB3) 的文档,以及如何为其他机器人自定义它、调整行为以获得更好的性能以及自定义内部结构以获得高级结果。
工业机械臂
如上为旧版案例,最新版案例即将更新(ROS 2 Foxy)。

- moveit.ros.org
已经更新,并且默认文档为ROS 2 Foxy

推荐ROS 2 Foxy 2.1 LTS。功能强大!
将机器人带入未来
结合运动规划、操控、3D 感知、运动学、控制和导航方面的最新进展

- 运动规划 :通过混乱的环境中产生的高自由度轨迹,避免局部最小值
- 操控:通过抓取生成分析环境并与之交互
- 逆运动学:求解给定姿势的关节位置,即使在过度致动的手臂中
- 控制:通过通用接口对低级硬件控制器执行时间参数化联合轨迹
- 三维感知:使用 Octomaps 连接深度传感器和点云
- 碰撞检测:使用几何图元、网格或点云数据避开障碍物

大厂酷爱,不要犹豫,这只是一小部分大厂名单呢……


-End-
以上是关于机器人编程趣味实践19-武林秘籍(文档)的主要内容,如果未能解决你的问题,请参考以下文章