第五章 拟牛顿法
Posted 是璇子鸭
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了第五章 拟牛顿法相关的知识,希望对你有一定的参考价值。
内容来自马昌凤编著的《最优化方法及其Matlab程序设计》,文章仅为个人的学习笔记,感兴趣的朋友详见原书。
拟牛顿法及其性质
基本思想:在基本牛顿法的步2中用Hess矩阵
G
k
G_k
Gk的某个近似矩阵
B
k
B_k
Bk(对称正定)取代
G
k
G_k
Gk
j将
d
k
=
−
G
k
−
1
g
k
d_k=-G_k^{-1}g_k
dk=−Gk−1gk转变成
d k = − B k − 1 g k d_k=-B_k^{-1}g_k dk=−Bk−1gk(BFGS)或 d k = − H k g k d_k=-H_kg_k dk=−Hkgk(DFP)
对称秩1算法
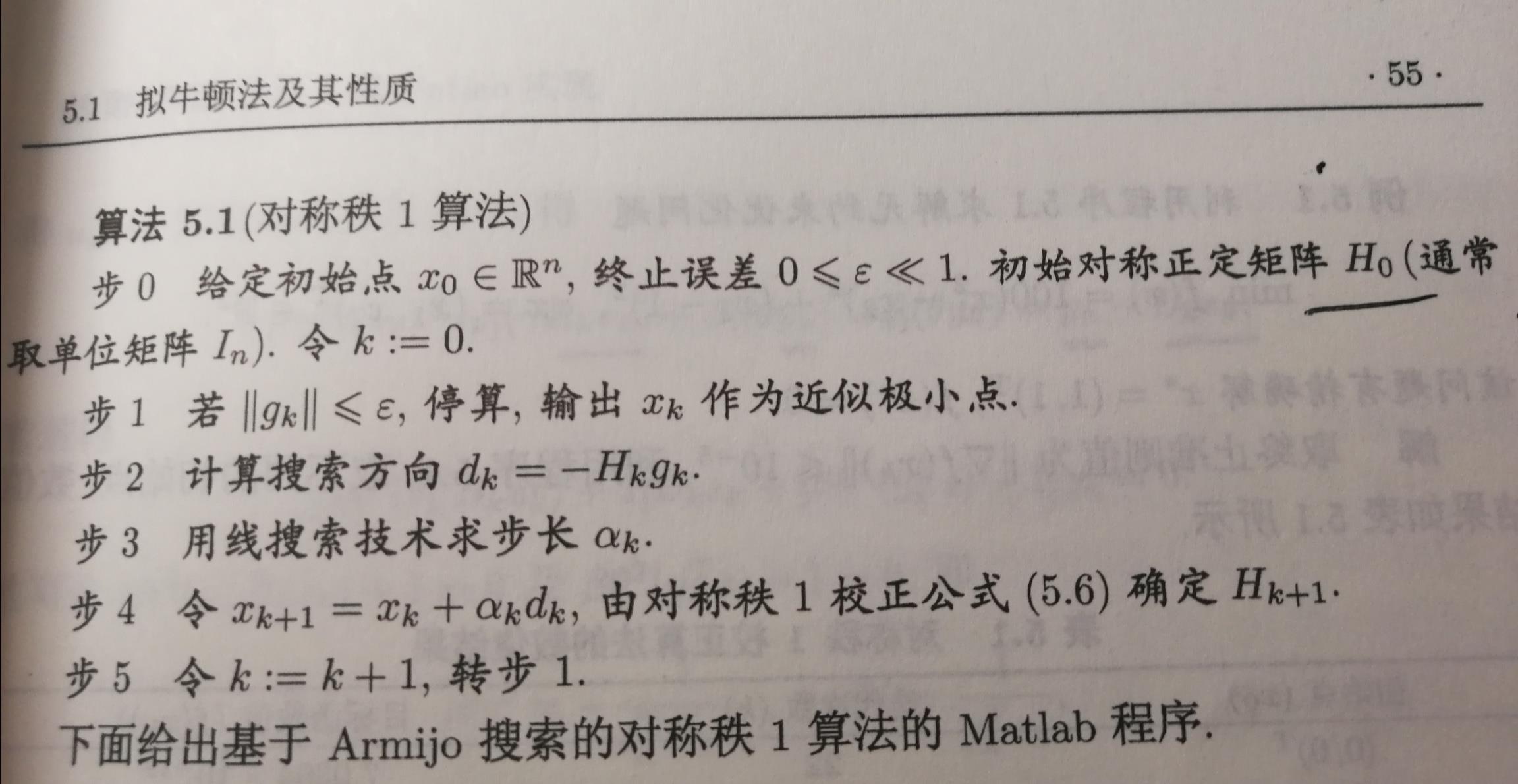
对称秩1算法程序
function [x,val,k]=sr1(fun,gfun, x0)
%功能: 用对称秩1算法求解无约束问题: min f(x)
%输入: x0是初始点, fun, gfun分别是目标函数及其梯度
%输出: x, val分别是近似最优点和最优值, k是迭代次数.
maxk=500; %给出最大迭代次数
rho=0.55;sigma=0.4; epsilon=1e-5;
k=0; n=length(x0); Hk=eye(n);
while(k<maxk)
gk=feval(gfun,x0); %计算梯度
dk=-Hk*gk; %计算搜索方向
if(norm(gk)<epsilon), break; end %检验终止准则
m=0; mk=0;
while(m<20) % 用Armijo搜索求步长
if(feval(fun,x0+rho^m*dk)<feval(fun,x0)+sigma*rho^m*gk'*dk)
mk=m; break;
end
m=m+1;
end
x=x0+rho^mk*dk;
sk=x-x0; yk=feval(gfun,x)-gk;
Hk=Hk+(sk-Hk*yk)*(sk-Hk*yk)'/((sk-Hk*yk)'*yk); %秩1校正
k=k+1; x0=x;
end
val=feval(fun,x0);
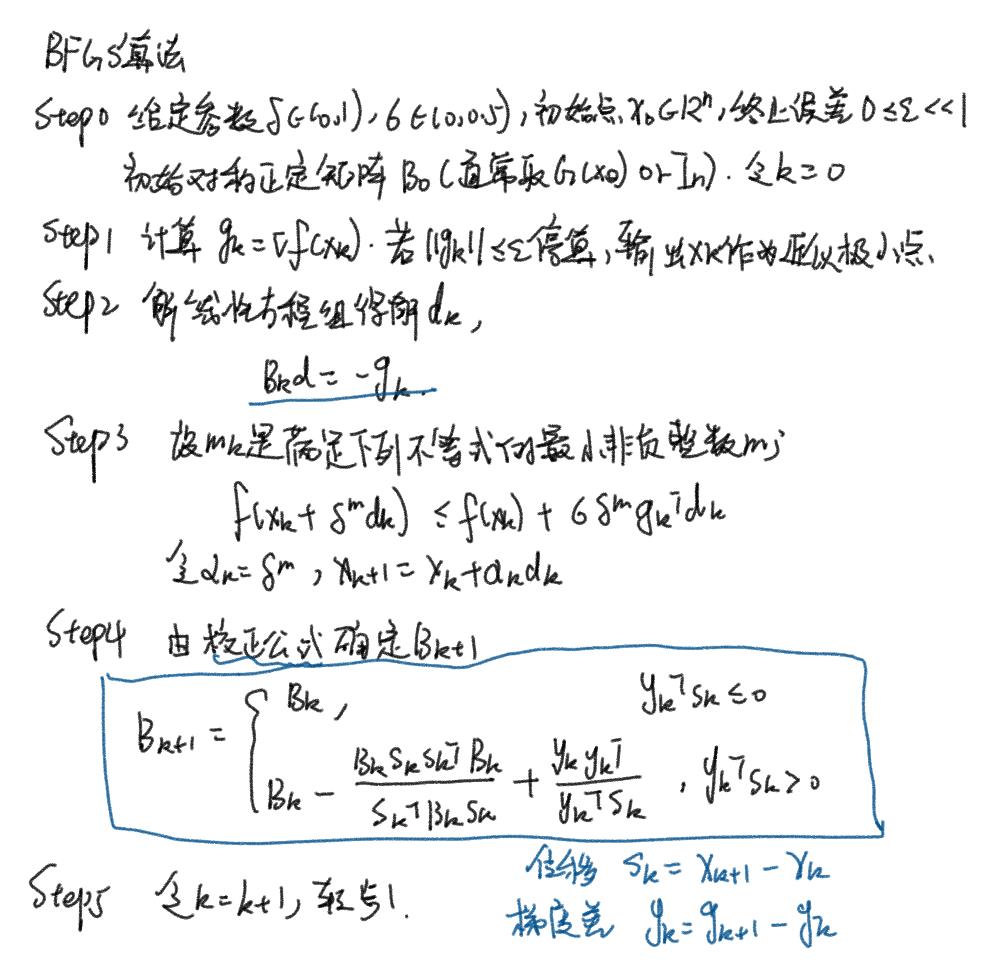
BFGS算法及其Matlab实现
算法
程序
function [x,val,k]=bfgs(fun,gfun,x0,varargin)
%功能: 用BFGS算法求解无约束问题: min f(x)
%输入: x0是初始点, fun, gfun分别是目标函数及其梯度;
% varargin是输入的可变参数变量, 简单调用bfgs时可以忽略它,
% 但若其它程序循环调用该程序时将发挥重要的作用
%输出: x, val分别是近似最优点和最优值, k是迭代次数.
maxk=500; %给出最大迭代次数
rho=0.55; sigma1=0.4; epsilon1=1e-5;
k=0; n=length(x0);
Bk=eye(n); %Bk=feval('Hess',x0); 两种取法,任选一个即可
while(k<maxk)
gk=feval(gfun,x0,varargin{:}); %计算梯度
if(norm(gk)<epsilon1), break; end %检验终止准则
dk=-Bk\\gk; %解方程组, 计算搜索方向 注意这里是左除
m=0; mk=0;
while(m<20) % 用Armijo搜索求步长
newf=feval(fun,x0+rho^m*dk,varargin{:});
oldf=feval(fun,x0,varargin{:});
if(newf<oldf+sigma1*rho^m*gk'*dk)
mk=m; break;
end
m=m+1;
end
%BFGS校正
x=x0+rho^mk*dk;
sk=x-x0; yk=feval(gfun,x,varargin{:})-gk;
if(yk'*sk>0)
Bk=Bk-(Bk*sk*sk'*Bk)/(sk'*Bk*sk)+(yk*yk')/(yk'*sk);
end
k=k+1; x0=x;
end
val=feval(fun,x0,varargin{:});
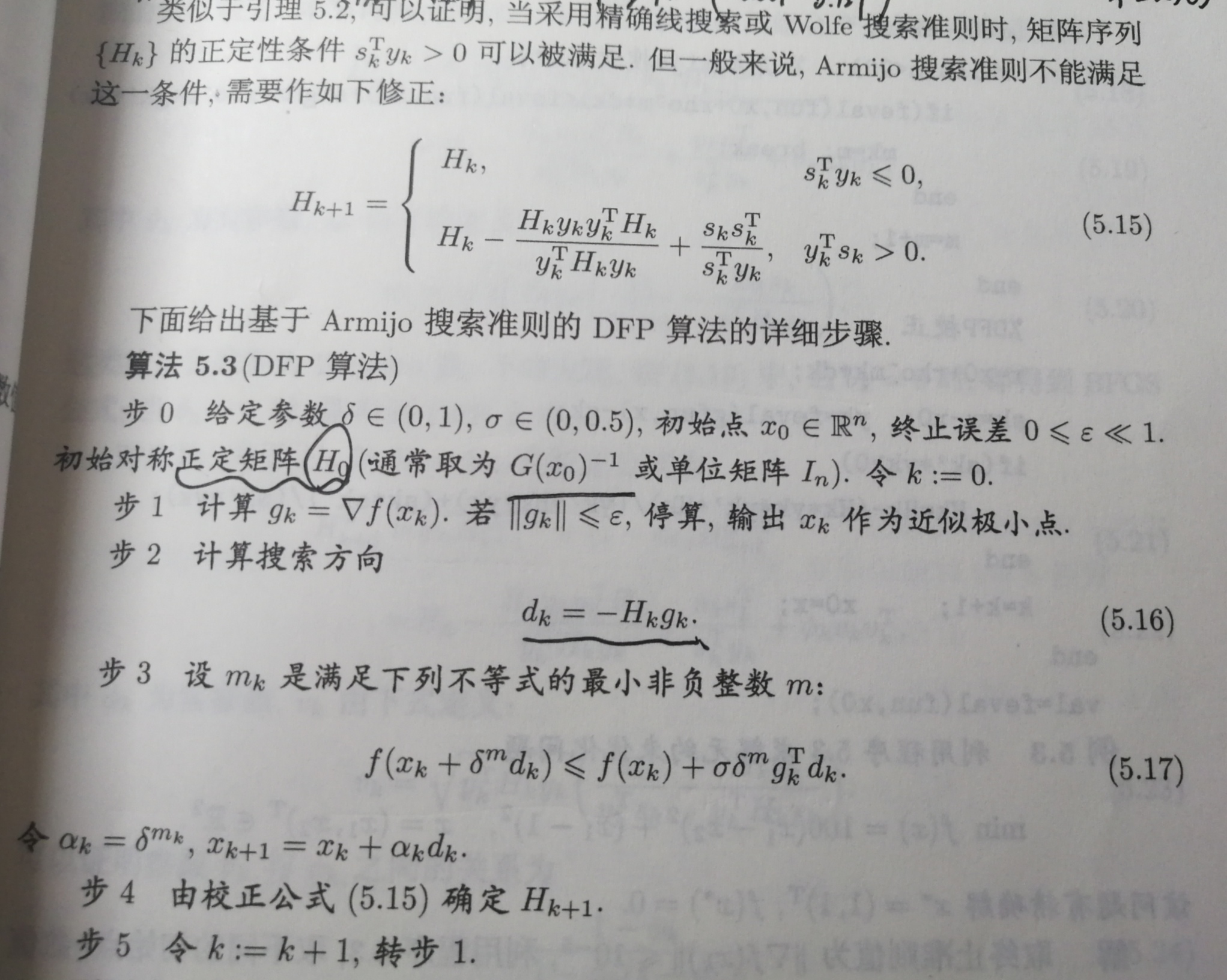
DFP算法及其Matlab实现
DFP与BFGS算法类似,只是在 G k G_k Gk的近似替代及其对应的校正公式上( s k s_k sk和 y k y_k yk的位置互换了)略有不同。
算法
程序
function [x,val,k]=dfp(fun,gfun,x0)
%功能: 用DFP算法求解无约束问题: min f(x)
%输入: x0是初始点, fun, gfun分别是目标函数及其梯度
%输出: x, val分别是近似最优点和最优值, k是迭代次数.
maxk=1e5; %给出最大迭代次数
rho=0.55;sigma=0.4; epsilon=1e-5;
k=0; n=length(x0);
Hk=inv(feval('Hess',x0)); %Hk=eye(n);
while(k<maxk)
gk=feval(gfun,x0); %计算梯度
if(norm(gk)<epsilon), break; end %检验终止准则
dk=-Hk*gk; %解方程组, 计算搜索方向
m=0; mk=0;
while(m<20) % 用Armijo搜索求步长
if(feval(fun,x0+rho^m*dk)<feval(fun,x0)+sigma*rho^m*gk'*dk)
mk=m; break;
end
m=m+1;
end
%DFP校正
x=x0+rho^mk*dk;
sk=x-x0; yk=feval(gfun,x)-gk;
if(sk'*yk>0)
Hk=Hk-(Hk*yk*yk'*Hk)/(yk'*Hk*yk)+(sk*sk')/(sk'*yk);
end
k=k+1; x0=x;
end
val=feval(fun,x0);
以上是关于第五章 拟牛顿法的主要内容,如果未能解决你的问题,请参考以下文章