进程互斥的软件实现方法
Posted 杀手不太冷!
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了进程互斥的软件实现方法相关的知识,希望对你有一定的参考价值。
进程互斥的软件实现方法
单标志法
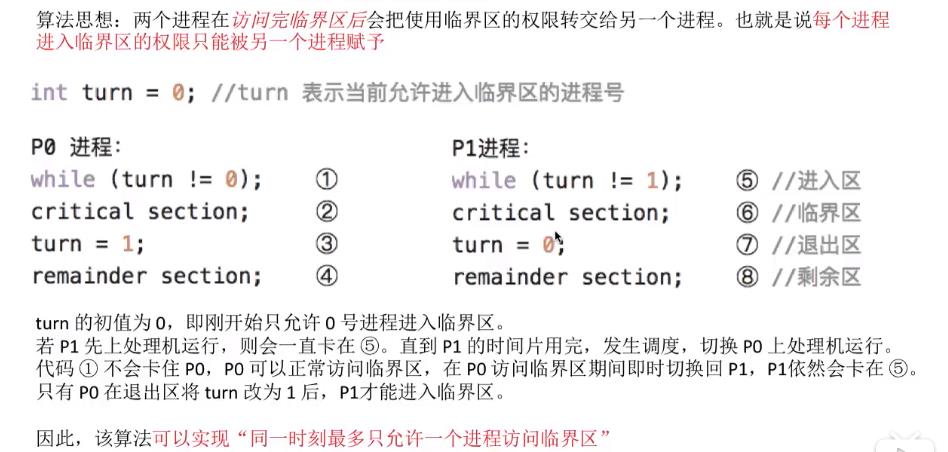
单标志法的缺点:turn表示当前允许进入临界区的进程号,而只有当前允许进入临界区的进程在访问了临界区之后,才会修改turn的值。也就是说,对于临界区的访问,一定是按P0->P1->P0->P1->…这样轮流访问。这种必须“轮流访问”带来的问题是,如果此时允许进入临界区的进程是P0,而P0一直不访问临界区,那么虽然此时临界区空闲,但是并不允许P1访问。因此,单标志法存在的主要问题是:违背“空闲让进”原则。
双标志先检查法
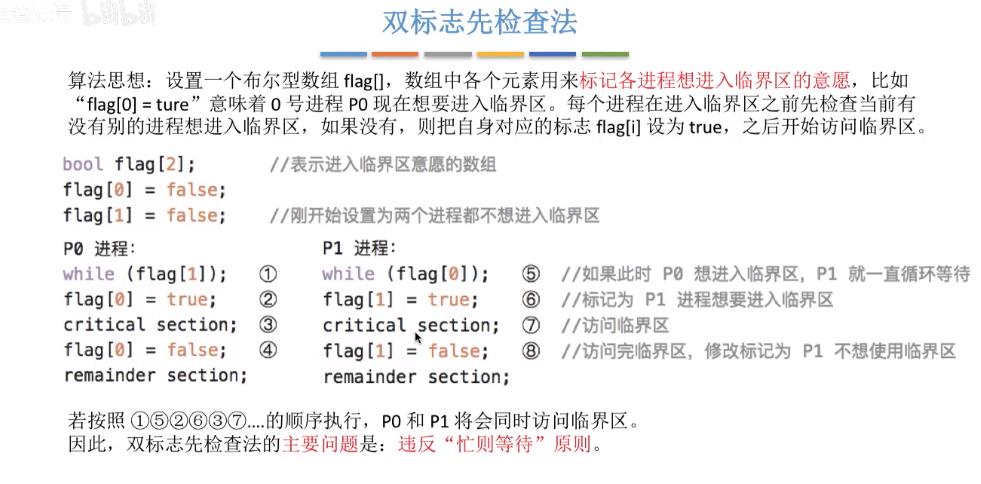
原因在于,进入区的“检查”和“上锁”两个处理不是一气呵成的。“检查”后,“上锁”前可能发生进程切换。
双标志后检查法
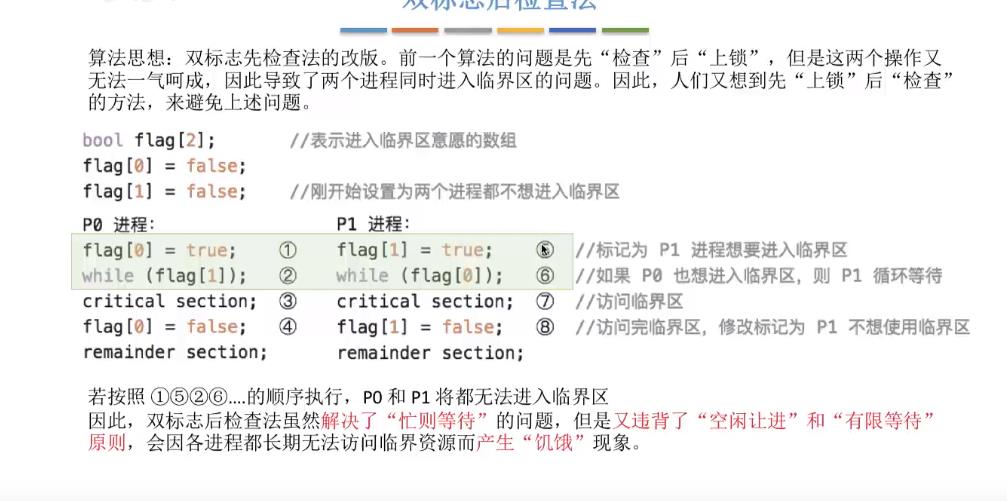
空闲让进:临界区如果没有进程访问,是空闲的,则会让进程进入临界区访问
有限等待:每个进程等待访问临界区的时间必须要是有限的
忙则等待:如果临界区有一个进程正在访问,则其他的进程不能继续访问临界区。
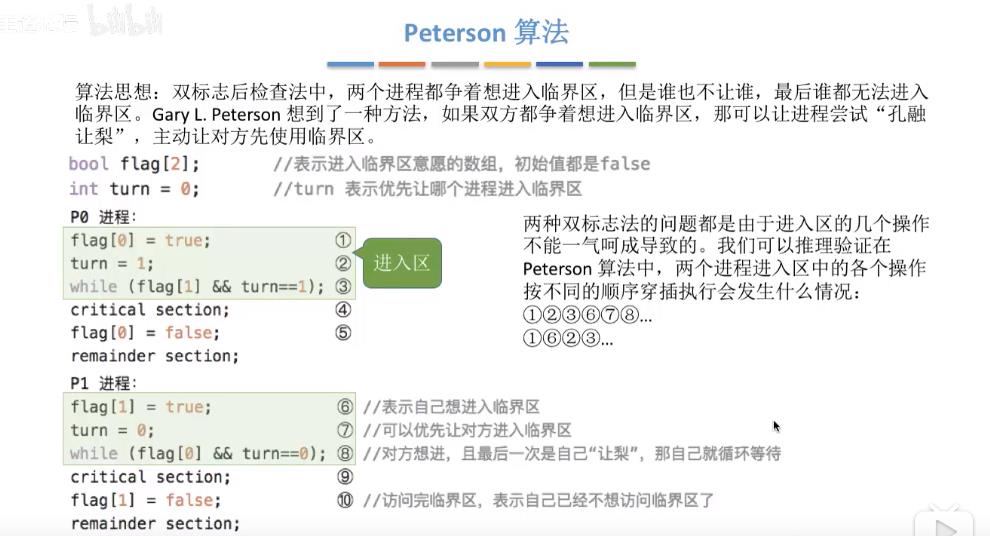
Peterson算法
以上是关于进程互斥的软件实现方法的主要内容,如果未能解决你的问题,请参考以下文章