第三章 最速下降法和牛顿法
Posted 是璇子鸭
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了第三章 最速下降法和牛顿法相关的知识,希望对你有一定的参考价值。
内容来自马昌凤编著的《最优化方法及其Matlab程序设计》,文章仅为个人的学习笔记,感兴趣的朋友详见原书。
本章讨论无约束优化问题 m i n f ( x ) minf(x) minf(x)的最速下降法和牛顿法及其改进算法,前者简单而古老,虽不再具有实用性,却是研究其他无约束优化算法的基础;后者也是一种经典的无约束优化算法,具有收敛速度快和自适应性等优点。
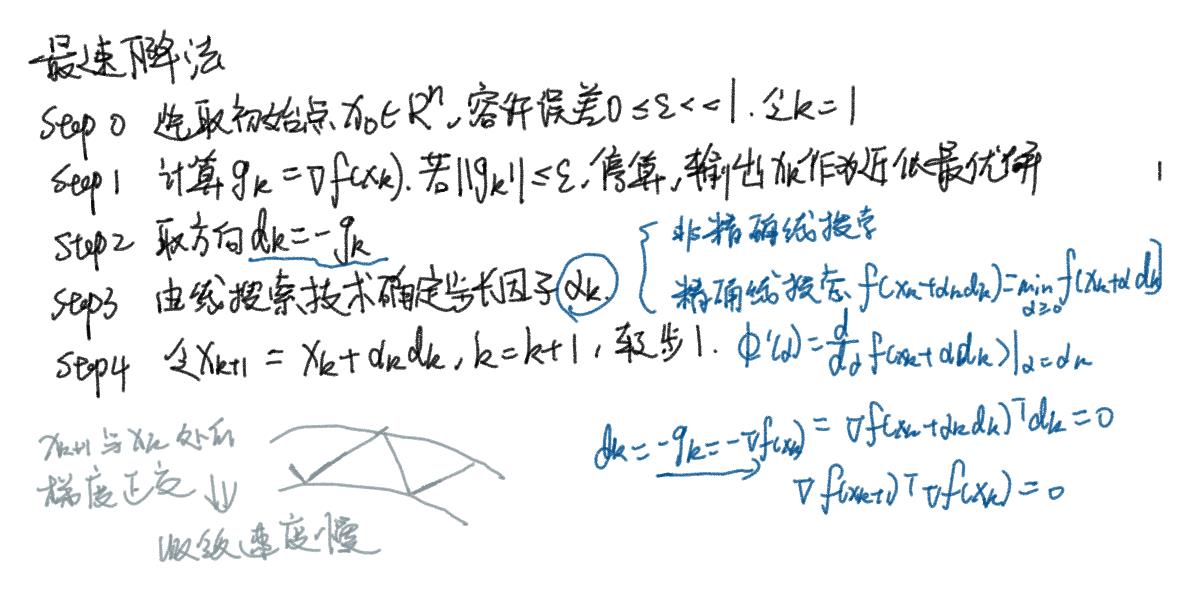
最速下降方法及其Matlab实现
算法
程序
function [x,val,k]=grad(fun,gfun,x0)
% 功能: 用最速下降法求解无约束问题: min f(x)
%输入: x0是初始点, fun, gfun分别是目标函数和梯度
%输出: x, val分别是近似最优点和最优值, k是迭代次数.
maxk=5000; %最大迭代次数
rho=0.5;sigma=0.4;
k=0; epsilon=1e-5;
while(k<maxk)
g=feval(gfun,x0); %计算梯度
d=-g; %计算搜索方向(精确线搜索)
if(norm(d)<epsilon), break; end
m=0; mk=0;
while(m<20) %Armijo搜索
if(feval(fun,x0+rho^m*d)<feval(fun,x0)+sigma*rho^m*g'*d)
mk=m; break;
end
m=m+1;
end
x0=x0+rho^mk*d;
k=k+1;
end
x=x0;
val=feval(fun,x0);
注:这里的 f u n fun fun与 g f u n gfun gfun分指目标函数与梯度,需在grad运行前准备好。(Armijo搜索部分可详见第二章相关内容)
示例1
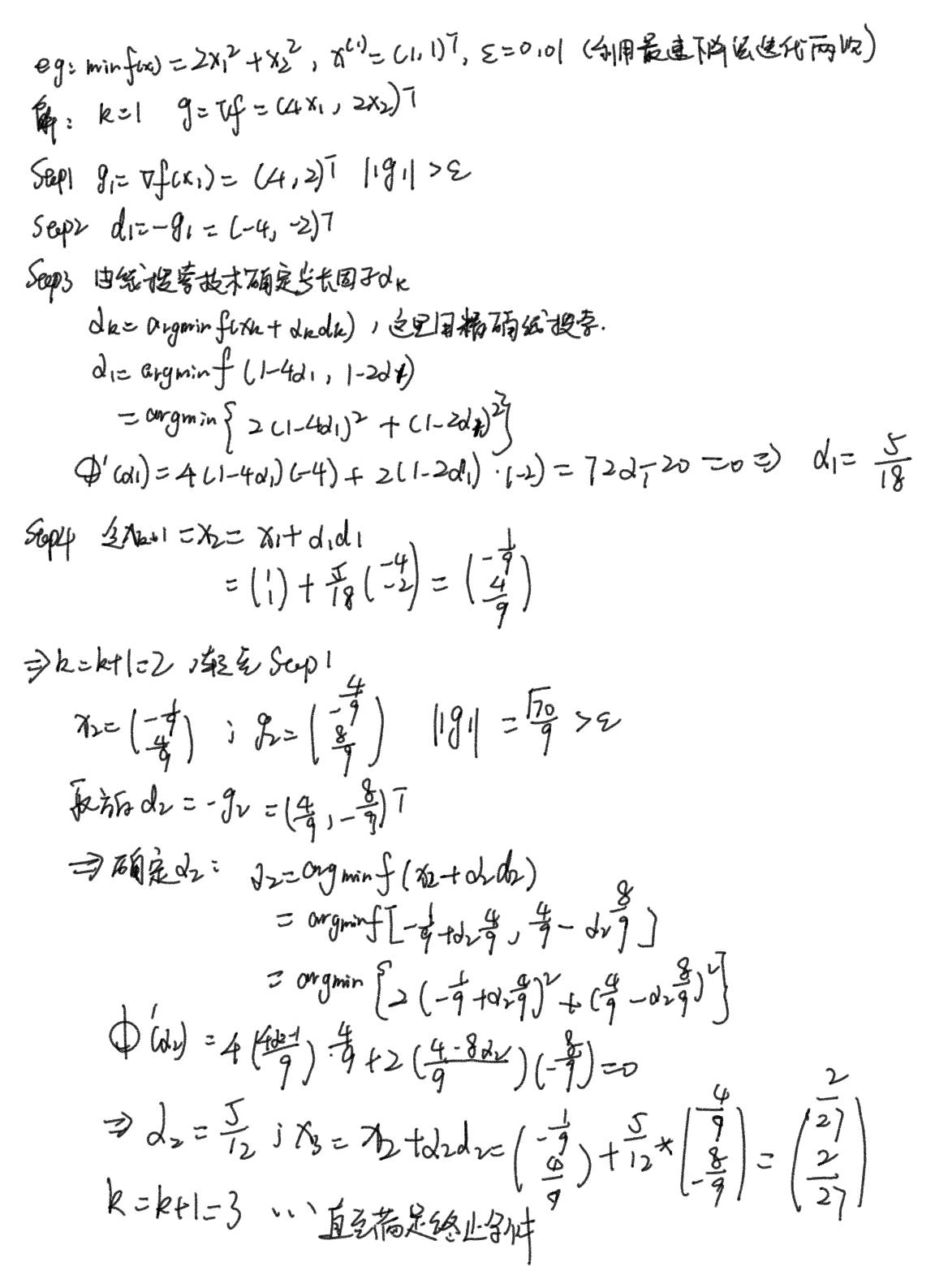
示例2
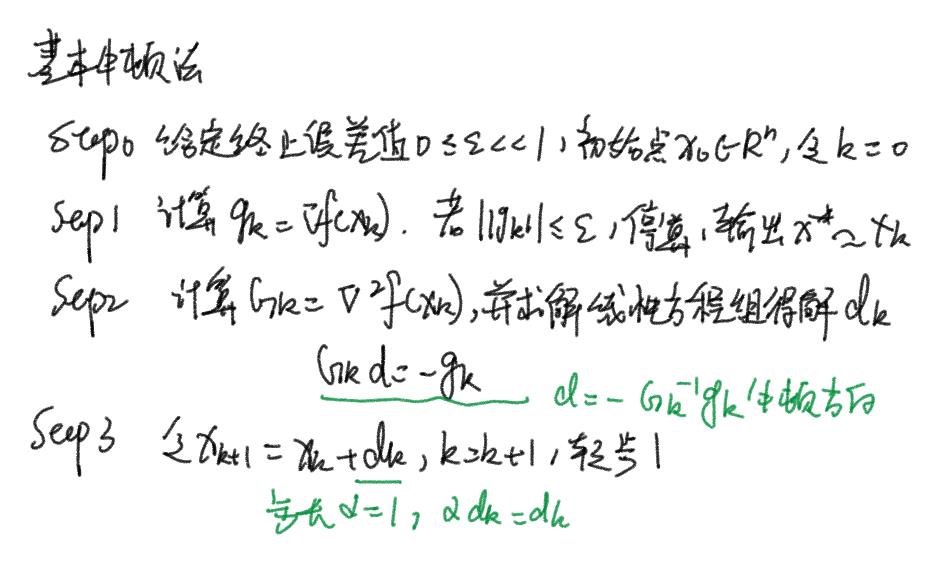
牛顿法及其Matlab实现
基本思想:用迭代点 x k x_k xk处的一阶导数和二阶导数对目标函数进行二次函数近似(泰勒多项式),然后把二次模型的极小点作为新的迭代点,并不断重复这一过程,直至求得满足精度的近似极小点。
算法
牛顿法最突出的优点是收敛速度快,具有局部二阶收敛性。但是对初始点要求足够“靠近”极小点,否则,有可能导致算法不收敛。由于实际问题的精度极小点一般是未知的,为克服这一困难,故引入线搜索技术以得到大范围收敛的算法,即下面的阻尼牛顿法。(此处基于Armijo准则)
阻尼牛顿法
算法
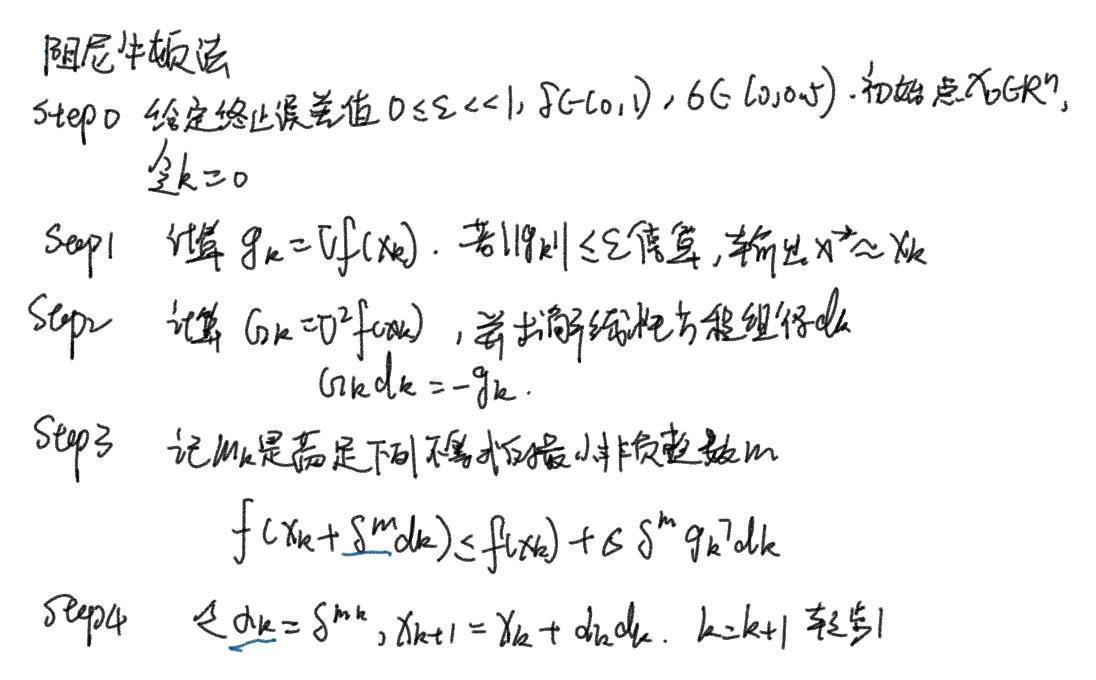
程序
function [x,val,k]=dampnm(fun,gfun, Hess,x0)
%功能: 用阻尼牛顿法求解无约束问题: min f(x)
%输入: x0是初始点, fun, gfun, Hess 分别是求
% 目标函数,梯度,Hesse 阵的函数
%输出: x, val分别是近似最优点和最优值, k是迭代次数.
maxk=100; %给出最大迭代次数
rho=0.55;sigma=0.4;
k=0; epsilon=1e-5;
while(k<maxk)
gk=feval(gfun,x0); %计算梯度
Gk=feval(Hess,x0); %计算Hesse阵
dk=-Gk\\gk; %解方程组Gk*dk=-gk, 计算搜索方向
if(norm(gk)<epsilon), break; end %检验终止准则
m=0; mk=0;
while(m<20) % 用Armijo搜索求步长
if(feval(fun,x0+rho^m*dk)<feval(fun,x0)+sigma*rho^m*gk'*dk)
mk=m; break;
end
m=m+1;
end
x0=x0+rho^mk*dk;
k=k+1;
end
x=x0;
val=feval(fun,x);
%gval=norm(gfun(x));
此处除需提前建立目标函数和梯度的M文件外,还需建立Hess矩阵的求解文件
function He=Hess(x)
n=length(x)
He=zeros(n,n);
He=[此处填函数的二阶求导结果]
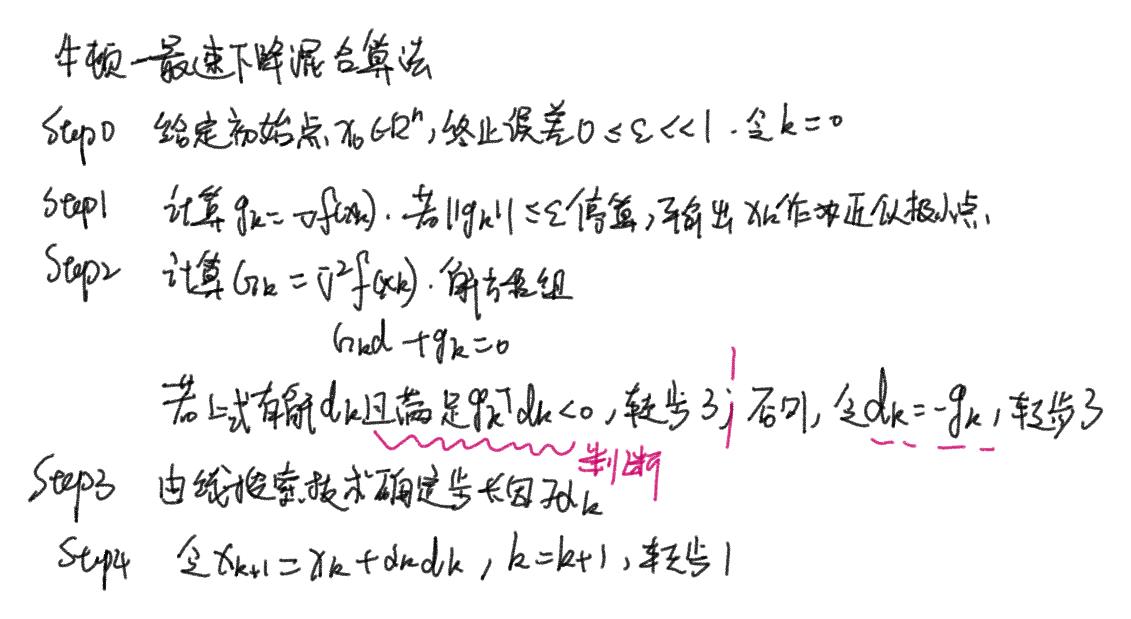
修正牛顿法及其Matlab实现
牛顿法具有不低于二阶的收敛速度,但该算法要求目标函数的Hess矩阵在每个迭代点 x k x_k xk处是正定的,否则,难以保证牛顿方向 d k = − G k − 1 g k d_k=-G_k^{-1}g_k dk=−Gk−1gk是 f f f在 x k x_k xk处的下降方向。为克服这一缺陷,故对其进行修正:将牛顿法与最速下降法结合起来,构造**“牛顿-最速下降算法”**。其基本思想为:当Hess正定时,采用牛顿方向作为搜索方向;否则,采用负梯度方向作为搜索方向。
算法
程序
function [x,val,k]=revisenm(fun,gfun,Hess,x0)
%功能: 用修正牛顿法求解无约束问题: min f(x)
%输入: x0是初始点, fun, gfun, Hess 分别是求
% 目标函数,梯度,Hesse 阵的函数
%输出: x, val分别是近似最优点和最优值, k是迭代次数.
n=length(x0); maxk=150;
rho=0.55;sigma=0.4; tau=0.0;
k=0; epsilon=1e-5;
while(k<maxk)
gk=feval(gfun,x0); % 计算梯度
muk=norm(gk)^(1+tau);
Gk=feval(Hess,x0); % 计算Hesse阵
Ak=Gk+muk*eye(n);
dk=-Ak\\gk; %解方程组Gk*dk=-gk, 计算搜索方向
if(norm(gk)<epsilon), break; end %检验终止准则
m=0; mk=0;
while(m<20) %用Armijo搜索求步长
if(feval(fun,x0+rho^m*dk)<feval(fun,x0)+sigma*rho^m*gk'*dk)
mk=m; break;
end
m=m+1;
end
x0=x0+rho^mk*dk;
k=k+1;
end
x=x0;
val=feval(fun,x);
%gval=norm(gfun(x));
以上是关于第三章 最速下降法和牛顿法的主要内容,如果未能解决你的问题,请参考以下文章