第一章 最优化理论基础
Posted 是璇子鸭
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了第一章 最优化理论基础相关的知识,希望对你有一定的参考价值。
内容来自马昌凤编著的《最优化方法及其Matlab程序设计》,文章仅为个人的学习笔记,感兴趣的朋友详见原书
1 最优化问题的数学模型
简单来说,最优化问题就是求一个多元函数在某个给定集合上的极值,其一般表达为:
m
i
n
f
(
x
)
min f(x)
minf(x)
s
.
t
.
x
∈
K
s.t. x∈K
s.t.x∈K
其中,
K
K
K为可行域,
x
x
x为决策变量,s.t.是subject to(受限于)的缩写。
非线性规划:
m
i
n
f
(
x
)
min f(x)
minf(x)
s
.
t
.
h
i
(
x
)
=
0
,
i
=
1
,
.
.
.
,
l
s.t. h_{i}(x)=0, i=1,...,l
s.t.hi(x)=0,i=1,...,l
g
i
(
x
)
>
=
0
,
i
=
1
,
.
.
.
,
m
g_{i}(x)>=0, i=1,...,m
gi(x)>=0,i=1,...,m
其中,
f
(
x
)
f(x)
f(x)、
h
i
(
x
)
h_{i}(x)
hi(x)、
g
i
(
x
)
g_{i}(x)
gi(x)都是定义在
R
n
R^n
Rn上连续可微的多元实值函数,并且至少有一个是非线性的。
记
E
=
i
∣
h
i
(
x
)
=
0
E={i|h_{i}(x)=0}
E=i∣hi(x)=0
I
=
i
∣
g
i
(
x
)
>
=
0
I={i|g_{i}(x)>=0}
I=i∣gi(x)>=0
若两指标集的并集为∅,则称之为无约束优化问题;否则为有约束优化问题。特别的,把
E
E
E≠∅且
I
I
I=∅的优化问题称为等式优化问题;而把
I
I
I≠∅且
E
E
E=∅的优化问题称为不等式优化问题。
f
(
x
)
f(x)
f(x)称为目标函数,
h
i
(
x
)
h_{i}(x)
hi(x),
g
j
(
x
)
g_{j}(x)
gj(x)称为约束函数。
二次规划:目标函数为二次函数,而约束函数都为线性函数的优化问题。(而目标函数和约束函数都为线性函数的优化问题称为线性规划)
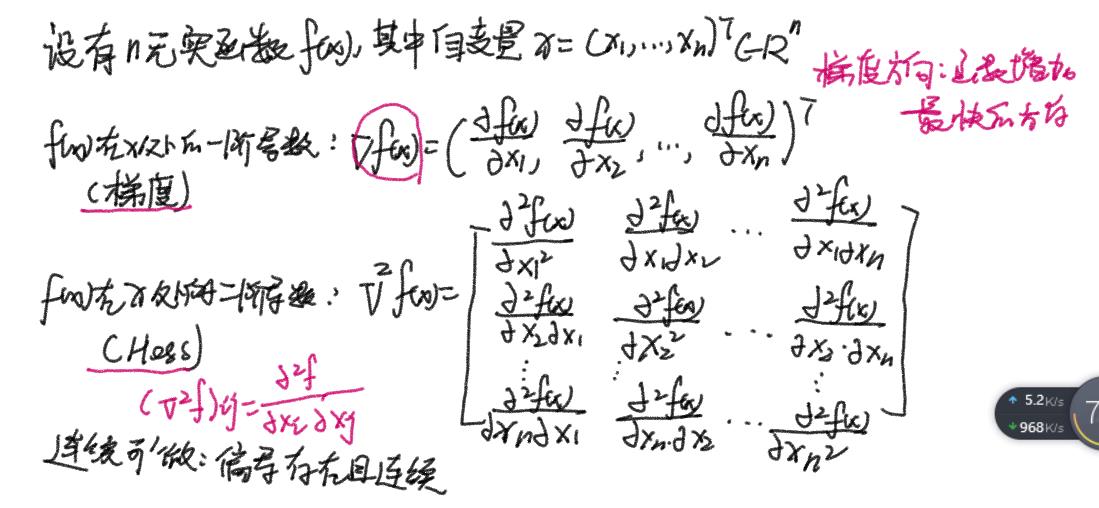
2 函数的可微性与展开
梯度与Hess矩阵:
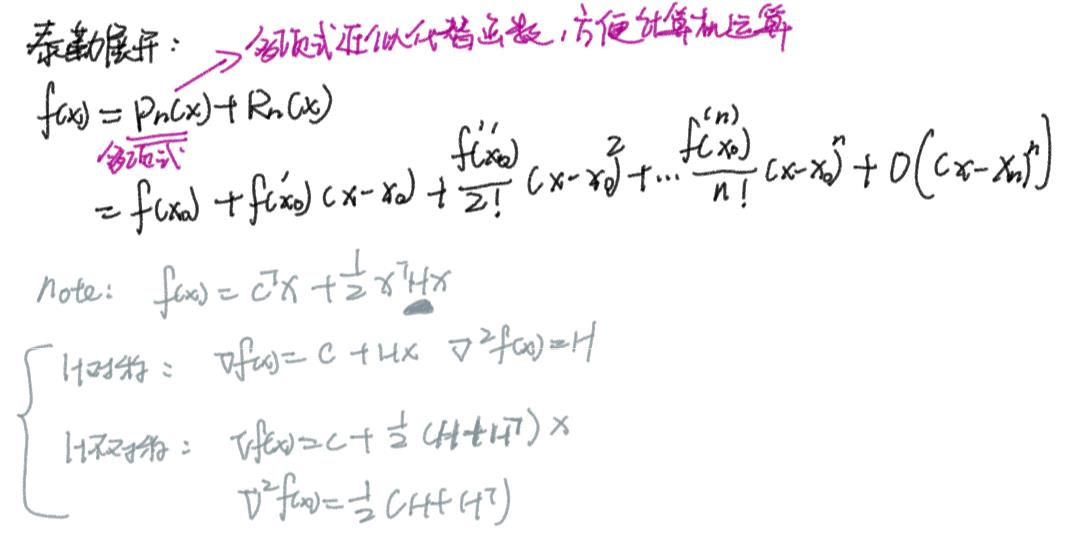
泰勒展开:
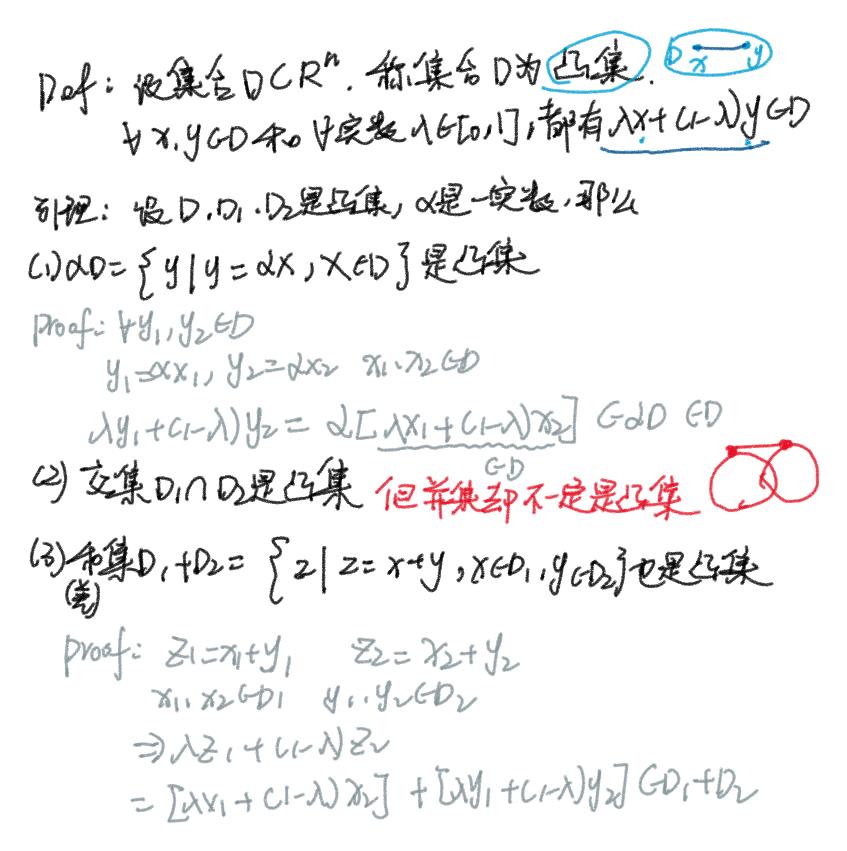
3 凸集与凸函数
凸集的定义&性质
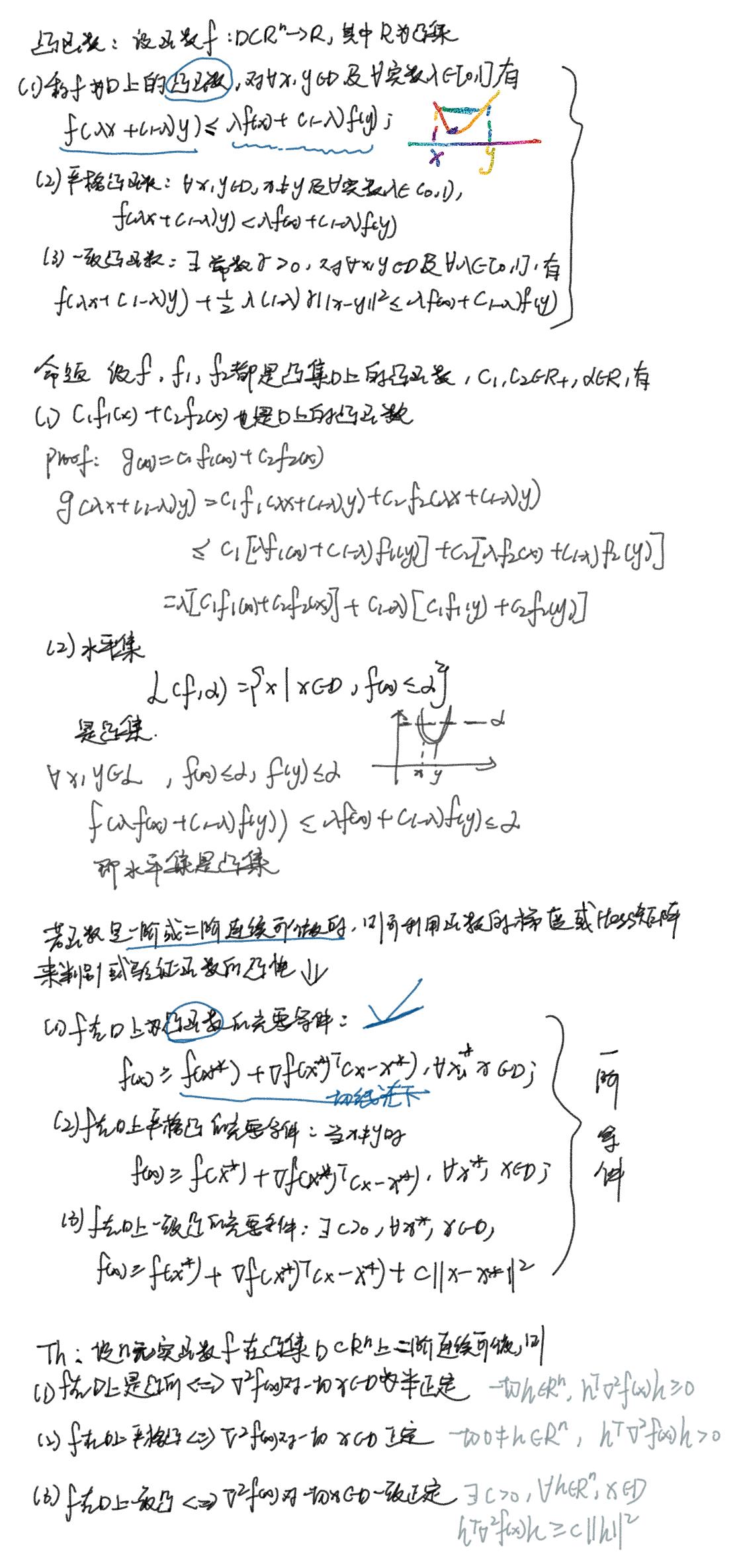
凸函数的定义与判断
4 无约束问题的最优性条件
全局极小点——最值
局部极小点——极值
一阶必要条件:设 f ( x ) f(x) f(x)在开集 D D D上一阶连续可微,若 x ∗ ∈ D x^*∈D x∗∈D是一个局部极小点,则必有 g ( x ∗ ) = 0 g(x^*)=0 g(x∗)=0。
二阶必要条件:设 f ( x ) f(x) f(x)在开集 D D D上二阶连续可微,若 x ∗ ∈ D x^*∈D x∗∈D是一个局部极小点,则必有 g ( x ∗ ) = 0 g(x^*)=0 g(x∗)=0且 G ( x ∗ ) G(x^*) G(x∗)是半正定矩阵。
二阶充分条件:设 f ( x ) f(x) f(x)在开集 D D D上二阶连续可微。若 x ∗ ∈ D x^*∈D x∗∈D满足条件 g ( x ∗ ) = 0 g(x^*)=0 g(x∗)=0及 G ( x ∗ ) G(x^*) G(x∗)是正定矩阵,则 x ∗ x^* x∗是一个局部极小点。
设 f ( x ) f(x) f(x)在 R n R^n Rn上是凸函数,并且是一阶连续可微的,则 x ∗ ∈ x^*∈ x∗∈ R n R^n Rn是全局极小点的充要条件是 g ( x ∗ ) = 0 g(x^*)=0 g(x∗)=0
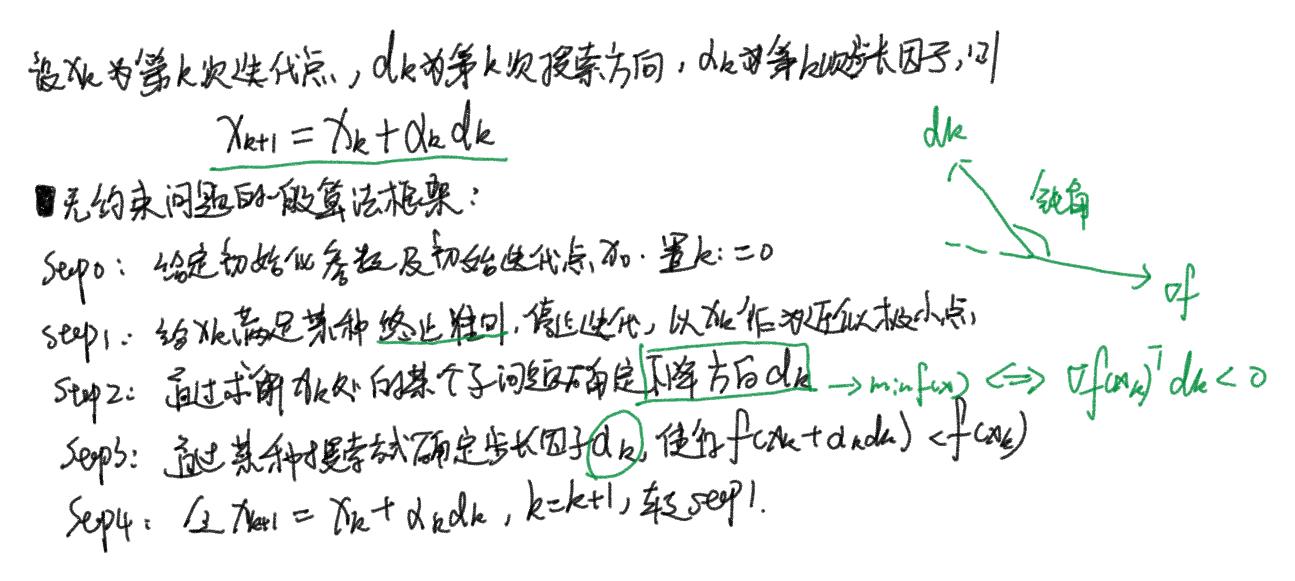
5 无约束优化问题的算法框架
无约束问题的一般算法框架
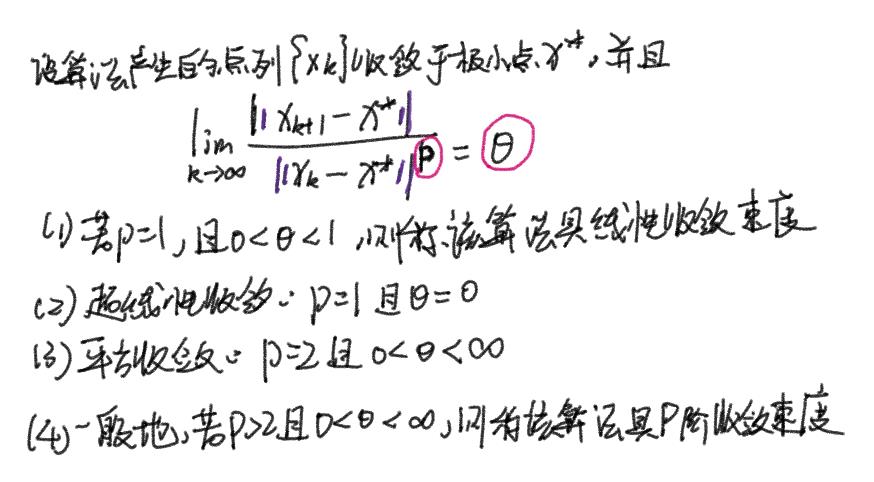
局部收敛与&全局收敛
- 局部收敛:只有当初始点 x 0 x_0 x0充分接近极小点 x ∗ x^* x∗时,由算法产生的点列 x k {x_k} xk才收敛于 x ∗ x^* x∗,则称该算法具有局部收敛性。
- 全局收敛性:若对任意的初始点
x
0
x_0
x0,由算法产生的点列
x
k
{x_k}
xk都收敛于
x
∗
x^*
x∗,则称该算法具有全局收敛性。
以上是关于第一章 最优化理论基础的主要内容,如果未能解决你的问题,请参考以下文章