波浪动力滑翔机的综述
Posted xiaokcehui
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了波浪动力滑翔机的综述相关的知识,希望对你有一定的参考价值。
按照惯例,给出以下结论:
(1)波浪滑翔机的制造成本和维修费用比较低,还具有利用率高、工作可靠、投放和回收方便、工作周期较长等优点,可以实现大面积海洋环境的长时间观测;
(2)波浪滑翔机宜用于气象和水体监测;
(3)波浪滑翔机无论在航行和定点保持都有较好的表现,应用前景广阔;
(4)波浪滑翔机可以极大推动北斗卫星应用;
(5)在地球物理方面,波浪滑翔机与磁力仪有一定的结合性,进行一些区域的大断面调查,补充卫星测磁分辨率不够的问题。
波浪滑翔机动力学建模及运动分析_薄玉清
波浪滑翔机是最近几年新发展起来的海洋观测装备,它以波浪能为驱动力能源,将波浪能转化为自身前进的机械能。且在上面安装的太阳能电池能为传感器和测量仪器提供电量补充,使其能按预先规划好的指令航行,或者按变更后的指令自主航行,实现长时间、大行程的航行。在波浪滑翔机上搭载有多种类型的传感器,所以利用波浪滑翔机能够得到各种海洋数据,例如海洋上的气象以及水质状况,并实时的与岸上基站进行数据传输。并且通过这些携带的传感器,不仅可以完成对规定海域的观测任务,还可以实现水体调查、资源勘测等,它们既可以单独进行工作,也可以群体协作,远程操控或根据实际情况实时调整指令。另外,波浪滑翔机的制造成本和维修费用比较低,还具有利用率高、工作可靠、投放和回收方便、工作周期较长等优点,可以实现大面积海洋环境的长时间观测。
(1)发展
2005年,为了了解海洋生物的生活作息规律,Roger Hine和Joseph D.Rizzi发明了一种新型的海洋监测设备——波浪滑翔机,能够实现在海上长时间作业。从此以后,波浪滑翔机在海洋领域的应用越来越广。
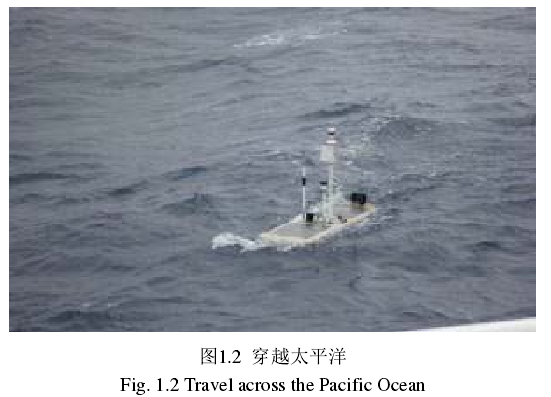
2012年,Liquid Robots公司宣布,,经过一年多的航行,从旧金山到达澳大利亚昆士兰,在此期间总共航行了约16668千米,创下了水下机器人行驶路线最长的世界纪录。在2012年《NATURE》杂志上,特别报道了上述自主航行历程。
(2)组成结构及原理
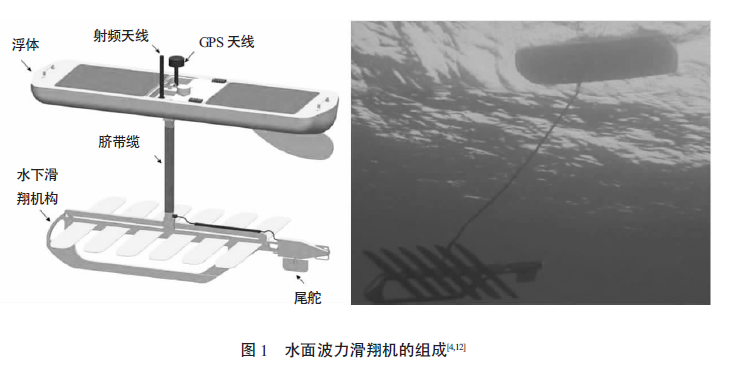
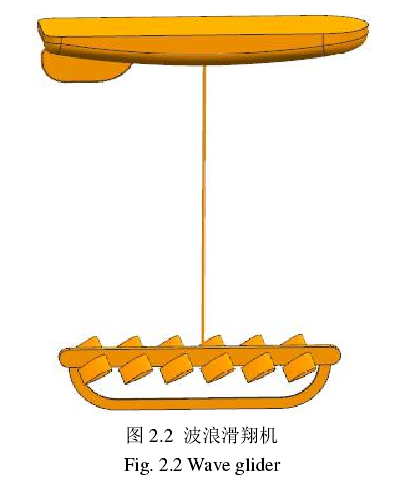
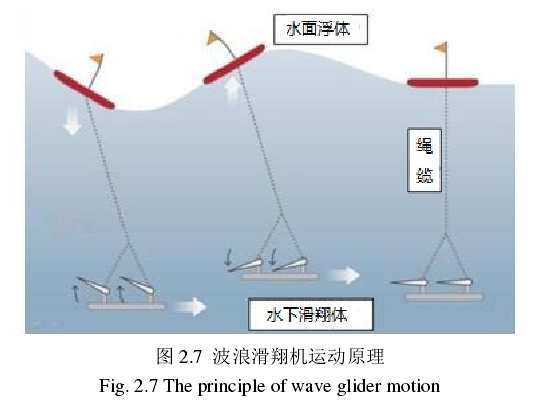
波浪滑翔机的波浪能推进系统是由纯机械结构组成的,不需要其他的推进机构和能量。在结构组成上,它由水面浮体、水下滑翔体和绳缆组成。
波浪滑翔机在运动过程中,随着波浪的起伏运动会出现不同的运动状态。因此其运动过程按跟随波浪起伏可以分为上升阶段和下降阶段。
2.4.1 上升阶段
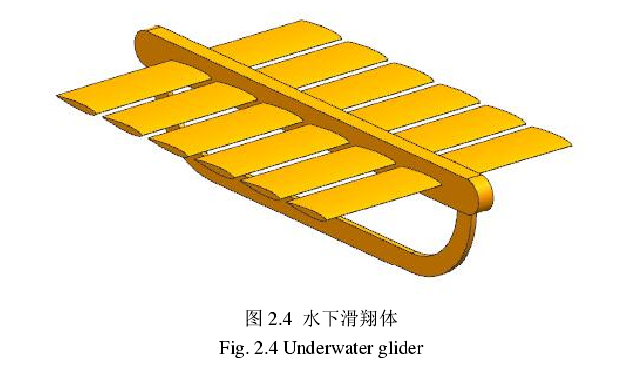
波浪滑翔机在上升过程中,水面浮体受到波浪上升的波浪力作用,随着波浪进行上升运动,此时通过绳缆拉动可实现向上运动。水下滑翔体在向上运动过程中,上面的六对翼板在波浪力的作用下向后下方转动,在绳缆拉力和翼板受力的作用下产生了向前运动的力,通过绳缆将力的传递给水面浮体,带动水面浮体向前运动。因此在上升的运动过程当中,波浪滑翔机将向上的波浪能转换为自身的动能,推动波浪滑翔机系统向前运动。有上述理论可知,产生水平驱动力的是转动了一定角度的翼板,图 2.8为波浪滑翔机在波浪上升运动过程中,翼板的受力情况。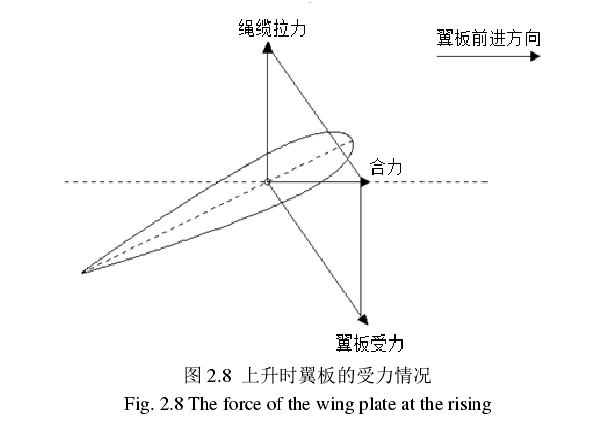
2.4.2 下降阶段
波浪滑翔机在下降过程中,水面浮体和水下滑翔体都在自身重力得作用下随着波浪下沉,水下滑翔体在自身重力以及密度的作用下,下降速度要比水面浮体的快,因此使得缆绳保持紧绷状态。水下滑翔体在下降过程中,其上的六对翼板在水动力的作用下向前上方转动,由于重力和水动力共同作用有一个前向的推力产生,带动水面浮体前进。所以当遇到波谷时,波浪滑翔机能够将向下运动波浪的波浪能转换为自身前进动能,推动整体系统向前运动。图 2.9 为波浪滑翔机在波浪下降运动过程中,翼板的受力情况。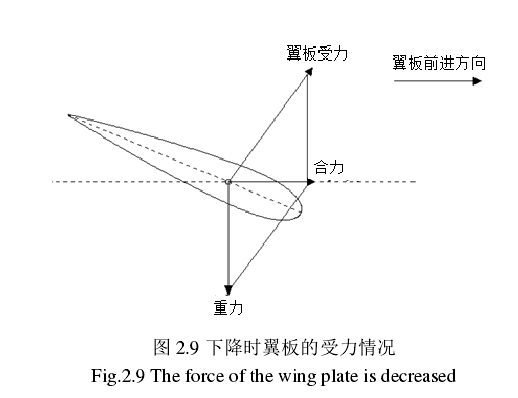
由以上分析可知,波浪滑翔机在运动过程中,波浪对翼板沿着 x 轴方向的推力,在各个运动过程中都是沿着其前进的方向,这个方向上的推力拉动水下滑翔体前进,同时通过绳缆拉动水面浮体向前移动,从而实现波浪滑翔机整体持续的前进,这样就将波浪能转化为机械能。
波浪动力滑翔机岸基监控系统_张森(孙秀军老师的学生)
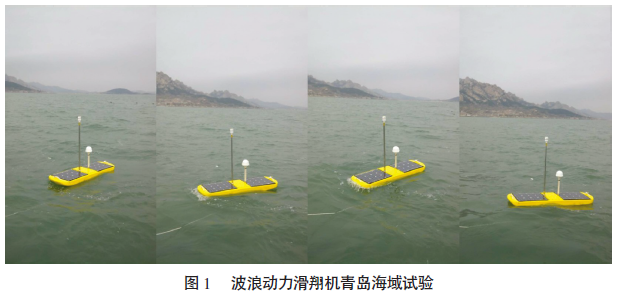
国家海洋技术中心在国内较早开展波浪动力滑翔机的研究开发,目前已经研发有原理样机并完成了3 次海试,图1 所示为波浪动力滑翔机的现场试验录像的4 个帧。
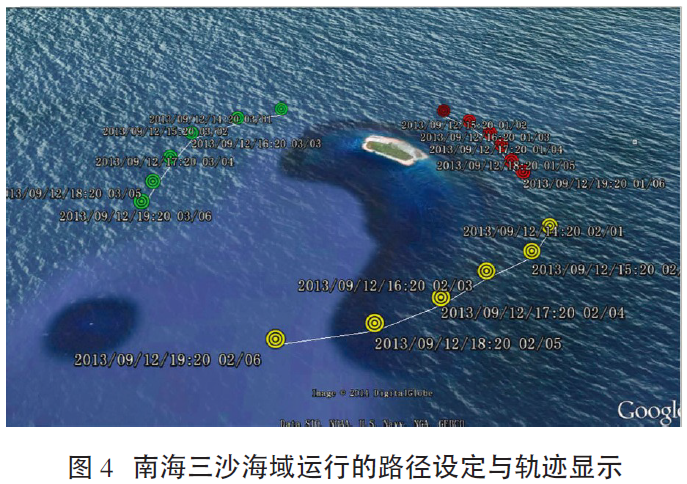
本文针对已研发的波浪动力滑翔机平台开展了岸基监控系统的开发工作,建设了一个基于Google Earth 和GPS/北斗双模定位通信系统的软件平台,利用卫星通讯与数据传输技术、矢量地图的轨迹显示和路径设定技术、环境监测数据的分类存储与管理技术,以及平台运行状态可视化查询技术等实现了在岸站对波浪动力滑翔机及其搭载的各类仪器进行全时段的可视化监视与控制,并完成对监测环境数据的接收、分类存储和可视化展示。
波浪动力滑翔机大部分时间工作于远海,传统的GPS/GPRS 定位通信模式因脱离了基站的服务而几乎失效,只能采用卫星定位通信模式。同时出于国家安全的考虑采用北斗卫星通讯,综合利用GPS的大用户量无源定位处理方式和“北斗一号”通信链路RDSS 的短报文通信模式,在波浪动力滑翔机向中心站发送的通信信息中增加GPS 测量内容,同时在原有“北斗一号”服务信息(中心站发出)的基础上增加GPS 定位结果内容,实现用户端接收到的GPS 观测量和岸基导航命令数据的交互,同时也能提高定位精度。
波浪滑翔机海上试验研究_王海军(710研究所)
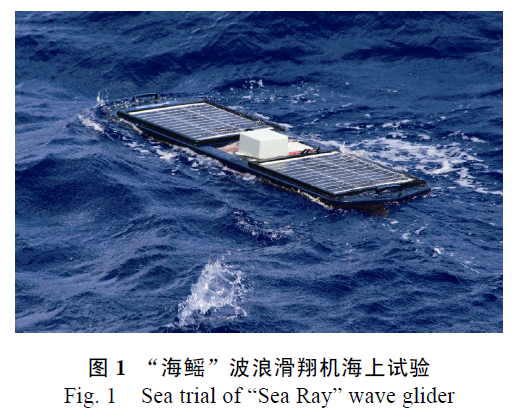
介绍了“海鳐”波浪滑翔机2019 年在南海中东部海域协同组网海上试验的情况,包括试验对象、试验海区、试验步骤和试验数据分析。本次试验最大航程3 069.3 km,连续航行时间94 d。3 级海况下航速大于1 kn,定点位置保持半径精度小于150 m。经历多次台风考验,验证了波浪滑翔机在恶劣海况下的生存能力。开展了多台波浪滑翔机的编队走航和定点位置保持试验,并且与国内相关单位的波浪滑翔机进行了性能比测。本次海上试验为波浪滑翔机产品设计定型和示范应用奠定了基础。
国外波浪滑翔机技术已经相对成熟, 美国LiquidRobotics 公司的波浪滑翔机已实现产品化,并在海洋研究、气象观测、军事等领域得到实际应用。
国内波浪滑翔机经过近些年的发展虽与发达国家相比还有较大差距,但在国家863 计划及国家重点研发计划的支持下也已取得长足的进步。中国船舶重工集团有限公司第七一〇研究所突破了波浪滑翔机平台的一系列重大关键技术,目前已进入设计定型和示范应用阶段,并完成了小批量生产。国内从事波浪滑翔机的科研单位还有国家海洋技术中心、中国海洋大学和哈尔滨工程大学等科研院所。海上试验是海洋装备实现产品化,投入实际应用前最关键的阶段。2019 年5 月9 日–8 月15日,由天津大学、中国船舶重工集团有限公司第七一〇研究所、国家海洋技术中心、中国海洋大学等单位共同承担的国家重点研发计划“海洋滑翔机改造与协作观测技术”课题在南海进行了自测模拟海试。本文介绍了此次海试的主要试验对象、试验海区、试验过程及试验数据分析,为“海鳐”波浪滑翔机产品设计定型和示范应用奠定基础。
本次试验对象之一为中国船舶重工集团有限公司第七一〇研究所研制的“海鳐”波浪滑翔机,编号为2 号、3 号、4 号。

试验海区
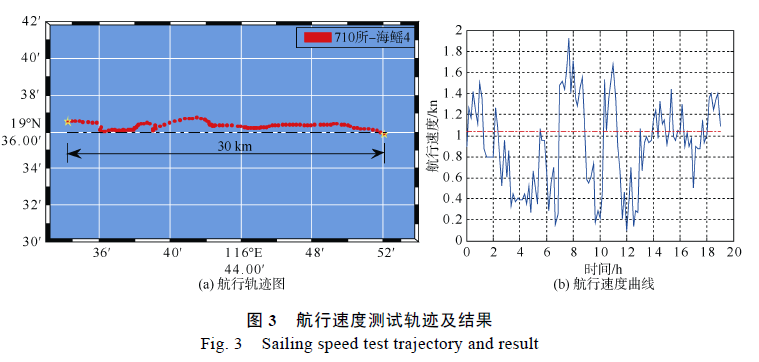
波浪滑翔机海上试验海区位于南海中东部(116°E,19.33°N)附近海域,水深约为1 000~2 500 m,样机布放期间风力不大于8 m/s,浪级不超过4 级,海区内的流速小于1 kn,周围10 km 内目测无渔网或其它设施,符合试验条件。
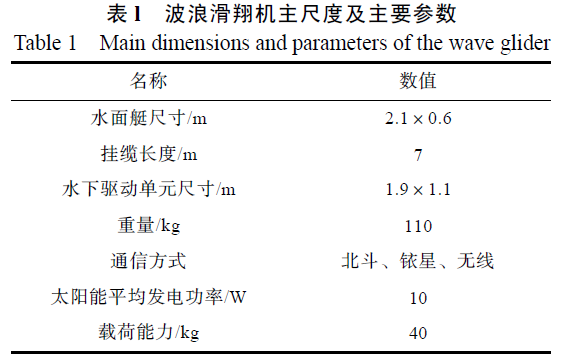
航行速度
航行速度计算方法:1 h 内波浪滑翔机航行距离除以3 600 s。航行距离依据记录的GPS 轨迹点,计算所有相邻点间距离的累加和。试验中取连续约30 km 直线距离,测试4 号波浪滑翔机航行速度,处理结果表明:12 h 滑翔机平均航行速度大于1 kn,
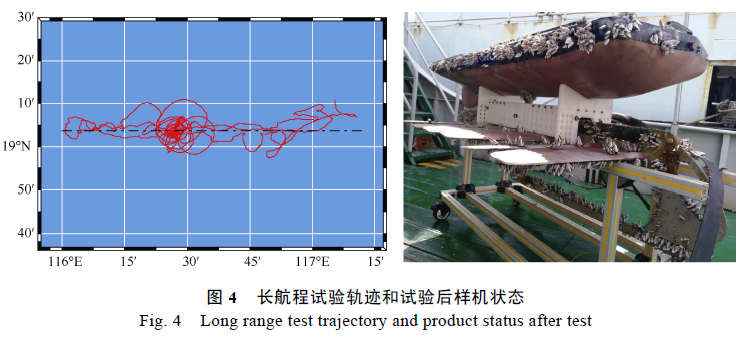
航行时间和里程
3 号样机2019 年5 月11 日布放,受休渔期结束影响,于8 月13 日回收,在位连续航行时间94 d,其中定点位置保持观测时间为47 d,航行总里程3 069.3 km。试验过程中平台受夏季海洋环境的影响,回收后表面附着较多海生物。该试验样机水面艇底部和水下驱动单元的翼板等部分表面进行了防污处理,通过试验对比发现经过防污处理的表面附着海生物较少,相反未进行防污处理的部分,附着海生物较多。
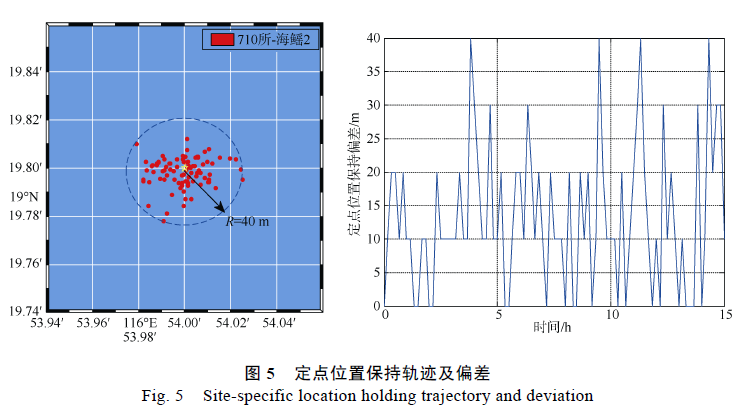
位置保持精度
2 号、3 号、4 号样机连续12 h 位置保持半径偏差分别小于40 m,70 m,140 m。其中2 号和3 号样机的期望半径为10 m,4 号样机的期望半径为100 m。从图5 中可以看出2 号样机的均值区域处于40 m 左右,有效地反映了波浪滑翔机的区域控位能力。
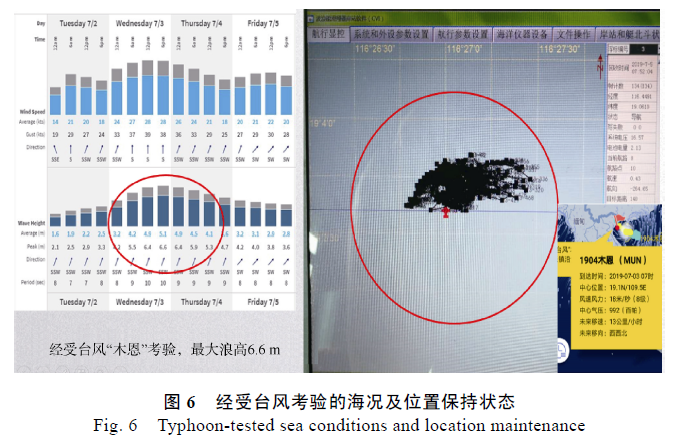
抗恶劣海况生存能力
波浪滑翔机经过了2019 年4 号台风“木恩”、5 号台风“丹娜丝”、7 号台风“韦帕”及9 号台风“利奇马”的考验,其中“木恩”台风经过时最大浪高达到6.6 m。台风经过时海况及样机工作情况如图6 所示。2019 年4 号台风木恩(热带风暴级)于7 月2 日下午的南海热带低压TD01,7 月3 日7时,中心风力18 m/s,中心气压992 hPa。
北斗通信验证情况
卫星实时通信是波浪滑翔机平台的优势,卫星通信的成功率是同行专家和用户特别关心的问题。本次海试过程中,根据岸站接收数据情况分析,卫星通信成功率在98%以上。并且在台风经过时,岸站能够实时稳定可靠接收到水面艇发回的数据报文,控制指令收发正常,充分验证波浪滑翔机在恶劣海况下实时通信的能力。
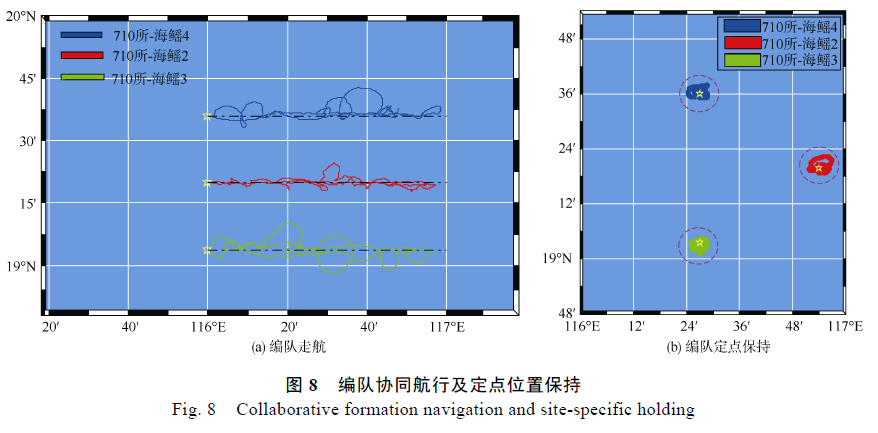
编队协同航行性能分析
2 号、3 号、4 号样机分别开展了15 d 的编队协同走航试验和15 d 的编队定点位置保持试验。
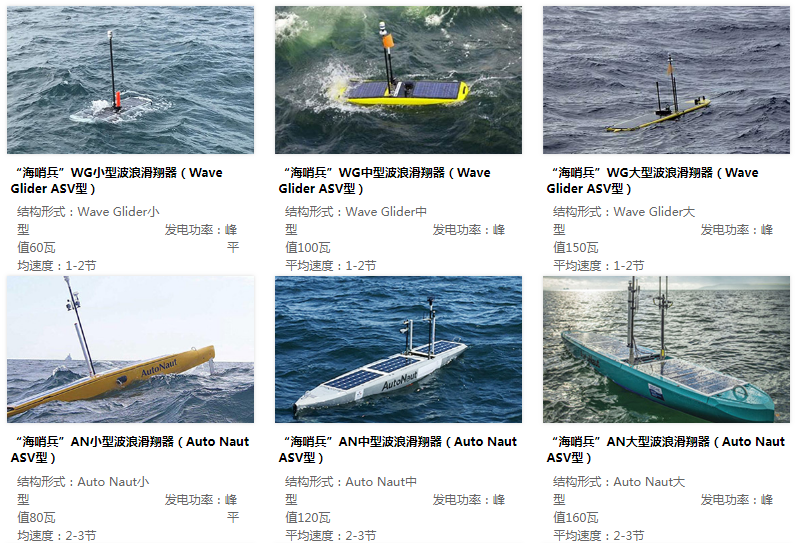
中国海洋大学孙秀军老师(http://pol.ouc.edu.cn/sunxiujun/whsbwcp/list.htm)在波浪滑翔机有比较深厚的技术积累,产品线比较丰富。
以上是关于波浪动力滑翔机的综述的主要内容,如果未能解决你的问题,请参考以下文章