ODrive踩坑电机和编码器参数配置校准位置闭环模式转动电机
Posted Mark_md
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ODrive踩坑电机和编码器参数配置校准位置闭环模式转动电机相关的知识,希望对你有一定的参考价值。
ODrive对无刷电机进行闭环控制,需要提前获取电机和编码器的参数。
电机极对数
电机需要配置的参数为 极对数、最大电流、校准电流、电机类型。其他参数如相电阻、电感等可由驱动器自动测量。
极对数 = 极数/2,极数 = 电机转子的磁铁个数。
我选用的DJI-3512电机,极对数为7。
借用张店家的图,其中右侧为转子,上面分布着14颗磁铁,则极数为14,极对数为7。

电机电流不清楚。以前DJI还卖散装电机的时候,官网是有电机的参数页的,现在统统下架了。不过看这粗壮的铜线,20~30A应该还是有的。
编码器分辨率(线束)
编码器我使用的是 TLE5012B-E1000,是一款磁编码器,支持SPI接口和ABI接口两种输出方式。与ODrive的连接使用ABI接口。
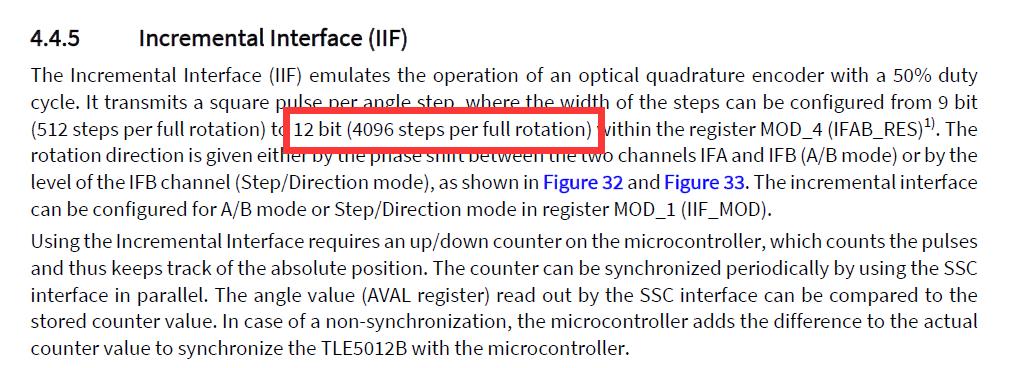
当 TLE5012B-E1000 的输出方式为ABI时,其默认分辨率为12位,即4096线/圈。
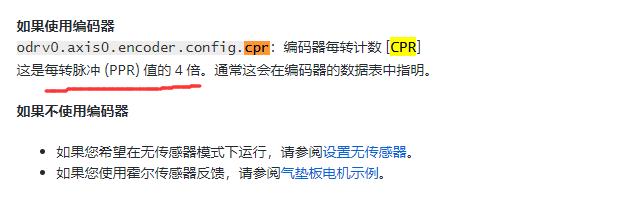
参阅 ODrive 在线文档,CPR值应为PPR值的4倍。
所以我的CPR要设置为 4096x4 = 16384。
(CPR:每转一圈,ODrive的编码器计数)
(PPR:每转一圈,编码器输出的脉冲数(线数))
为什么是4倍?因为ODrive的主控MCU是stm32,编码器计数使用Timer的编码器模式,输入捕获配置为同时捕获AB两相的上升/下降沿,即为 4个计数/pulse。
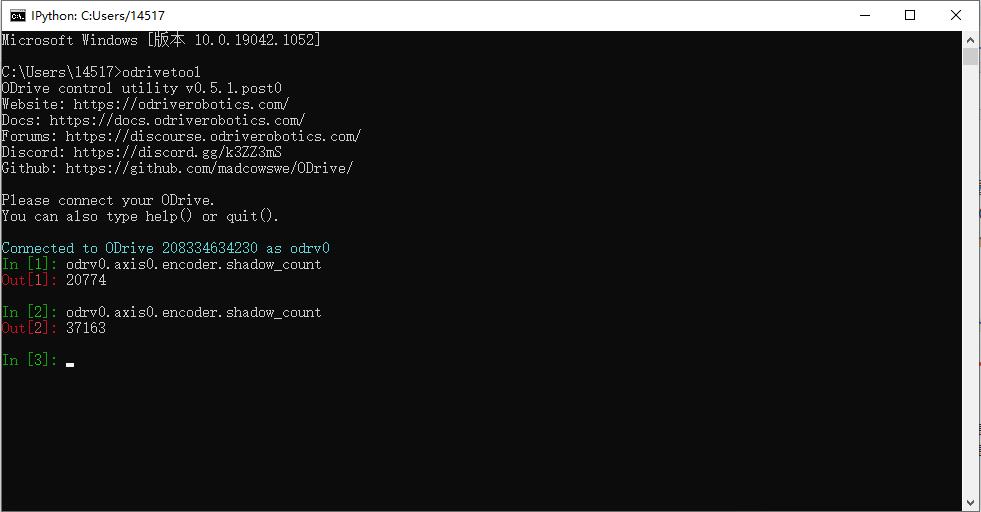
为了验证上面说的对不对,打开odrivetool。
使用odrv0.axis0.encoder.shadow_count指令,查询编码器计数。
查询当前编码器计数,计数值为 20774。
接着将电机转子记上记号,用手拨动一整圈,再次查询为 37163。
那么应设置的CPR值为 37163 - 20774 = 16389 ≈ 16384。
有些误差很正常,毕竟不能保证电机每次都转到相同的位置。但记住CPR = 编码器线束 * 4。
知道了电机和编码器的大致参数,下面使用调试工具对控制器进行配置。
推荐两个视频教程:
创客基地 ODrive视频教程(过于详细,从入门到退坑)
灯哥 ODrive视频教程(拖更严重)
关于巨磁阻磁编码器原理,及如何用TLE5012B构成一款伺服电机的博文。
TLE5012B 磁编码器原理
接线、上电
-
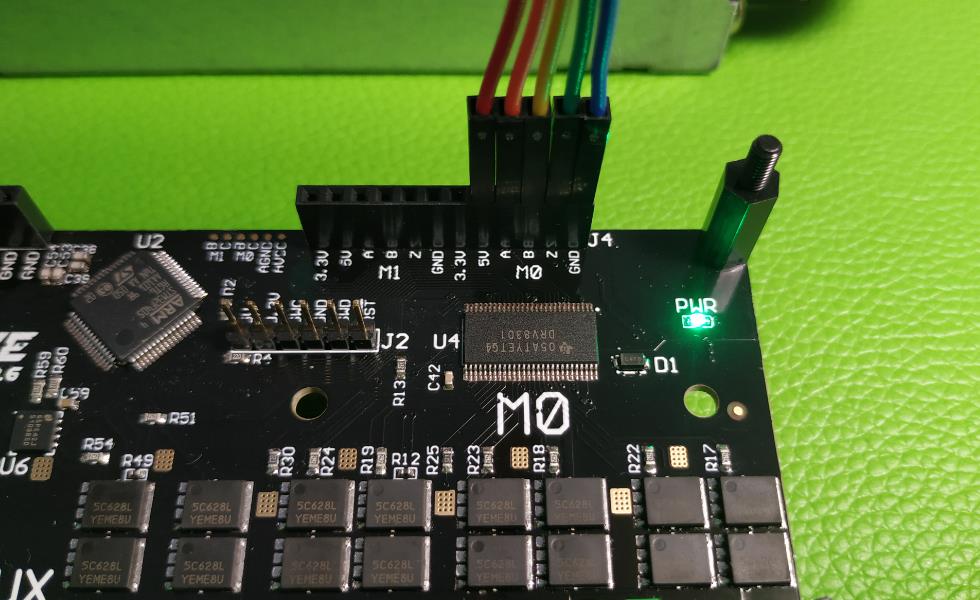
电机编码器连接右侧的接口,电机三根线接在M0位置。
-
主电源插电,USB连电脑。AUX端口上的制动电阻可以不接。
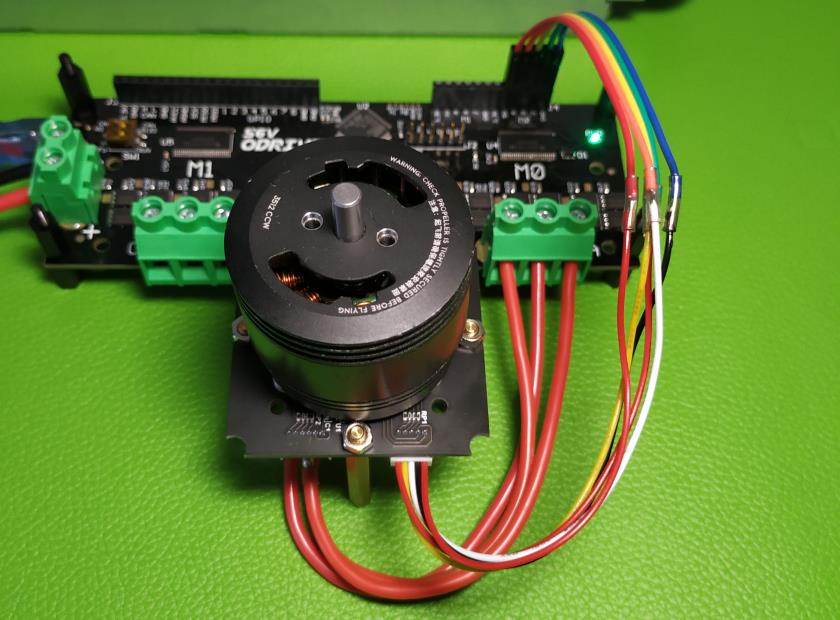
-
cmd打开命令行窗口,启动odrivetool,确认连接。
一、电机校准前的配置
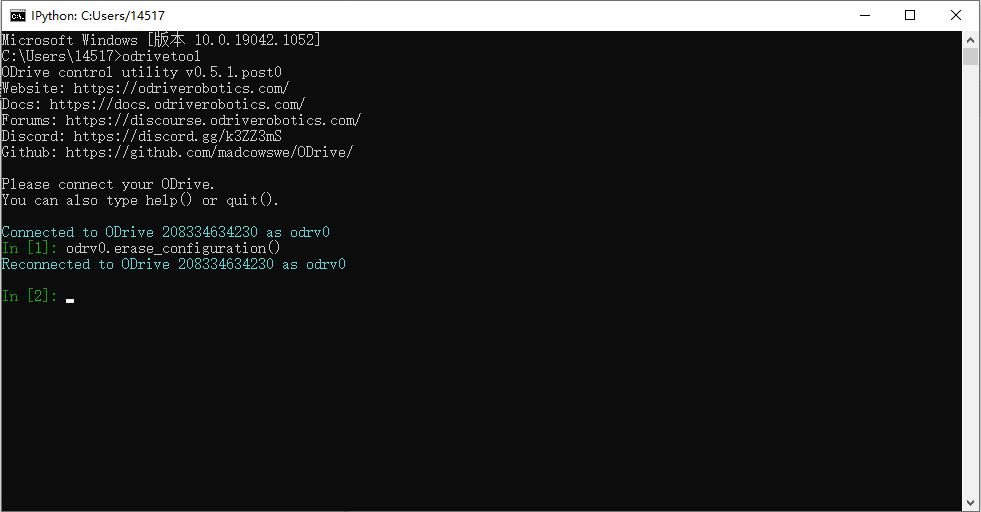
1.1、恢复出厂配置
问过了驱动器的卖家,出厂的固件为v0.5.1,有参数。适配自己的电机时,需要先恢复出厂配置。
# 恢复出厂配置
odrv0.erase_configuration()
这期间,ODrive会断连一次并自动重新连接电脑。
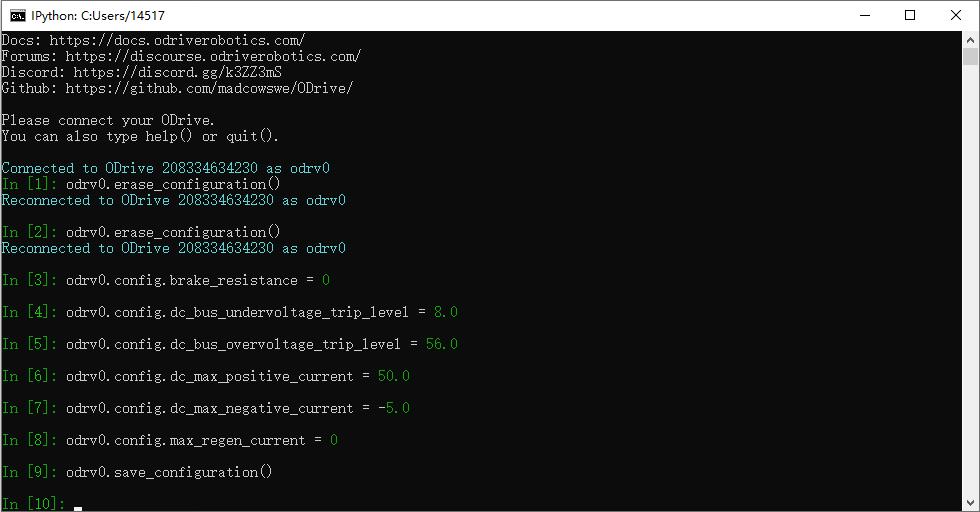
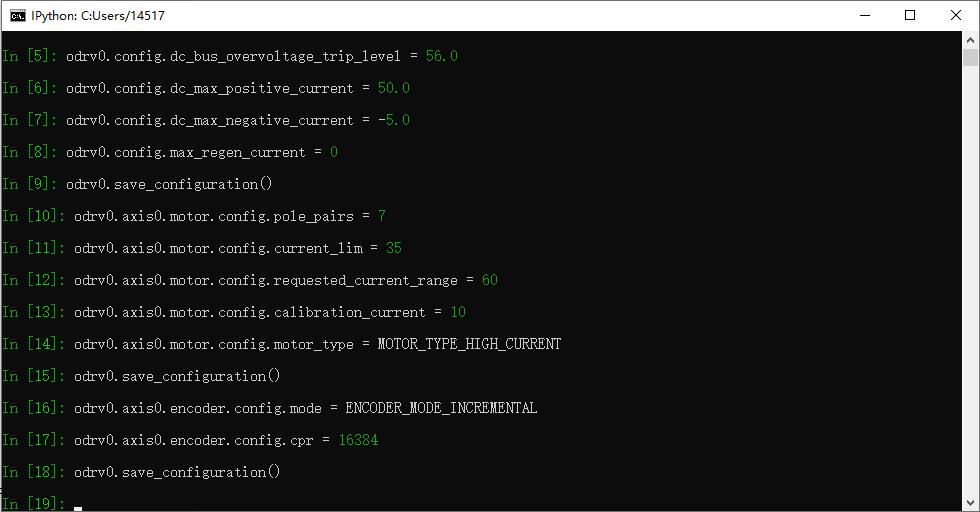
1.2、配置主板参数
- 限制参数主要用于保护主板、电机不会受损,包括最大电流、保护电压等参数。
- 根据自己适配的电机,酌情调整大小。
# 配置AUX接口上的制动电阻值(常见的为0.47、2.0Ω),如没接则配置为0
odrv0.config.brake_resistance = 0
# 配置低压保护阈值(V)
odrv0.config.dc_bus_undervoltage_trip_level = 8.0
# 配置高压保护阈值(V)
odrv0.config.dc_bus_overvoltage_trip_level = 56.0
# 配置过流保护阈值(A)
odrv0.config.dc_max_positive_current = 50.0
# 配置反向电流阈值(电机制动产生的反向电流)(A)
odrv0.config.dc_max_negative_current = -5.0
# 配置回充电流值(根据供电电池的参数配置,开关电源供电配置为0)(A)
odrv0.config.max_regen_current = 0
# 保存参数
odrv0.save_configuration()
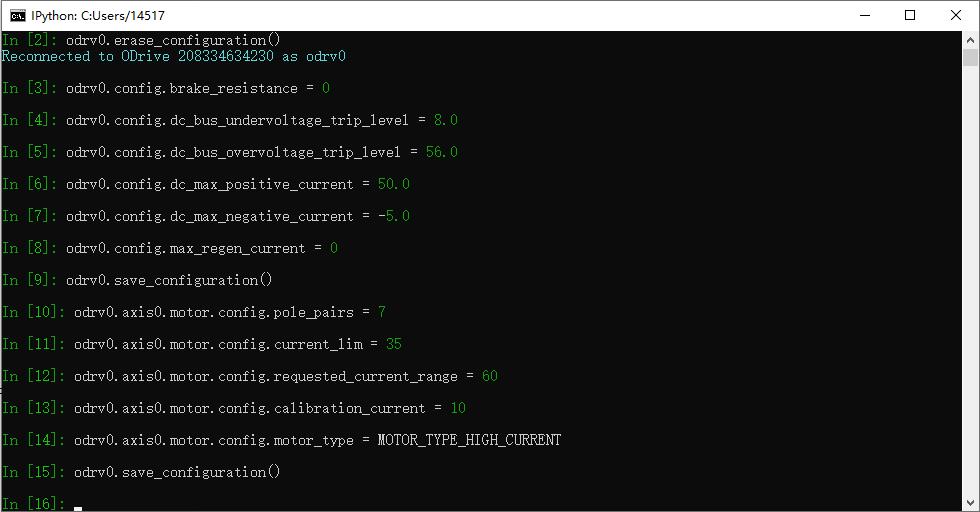
1.3、配置电机参数
# 配置电机0极对数,根据博客开篇的介绍,自己去数磁极个数,然后/2
odrv0.axis0.motor.config.pole_pairs = 7
# 配置电机0的限制电流(A)
odrv0.axis0.motor.config.current_lim = 35
# 配置电机0的电流采样阈值(A)
odrv0.axis0.motor.config.requested_current_range = 60
# 配置电机0校准时的电流阈值(根据自己电机的负载状况酌情配置)(A)
odrv0.axis0.motor.config.calibration_current = 10
# 配置电机0类型。
# 目前支持两种电机:大电流电机(MOTOR_TYPE_HIGH_CURRENT)和云台电机(MOTOR_TYPE_GIMBAL)
odrv0.axis0.motor.config.motor_type = MOTOR_TYPE_HIGH_CURRENT
# 保存参数
odrv0.save_configuration()
1.4、配置编码器参数
# 配置电机0编码器类型。当前使用的是ABI正交(增量)编码器。
odrv0.axis0.encoder.config.mode = ENCODER_MODE_INCREMENTAL
# 配置电机0编码器CPR(每转一圈,编码器的计数),为编码器线束*4,博客开篇有讲
odrv0.axis0.encoder.config.cpr = 16384
# 保存参数
odrv0.save_configuration()
1.5、配置控制器参数(位置闭环模式、配置PID参数)
# 配置电机0控制模式,为位置闭环控制
odrv0.axis0.controller.config.control_mode = CONTROL_MODE_POSITION_CONTROL
# 配置电机0最大转速(转/秒)(电机kv值 * 电压 / 60)
odrv0.axis0.controller.config.vel_limit = 120
# 配置位置环增益:20
odrv0.axis0.controller.config.pos_gain = 20
# 配置速度环增益:0.05
odrv0.axis0.controller.config.vel_gain = 0.05
# 配置积分增益:0.02
odrv0.axis0.controller.config.vel_integrator_gain = 0.02
# 配置输入模式为:梯形轨迹模式
odrv0.axis0.controller.config.input_mode = INPUT_MODE_TRAP_TRAJ
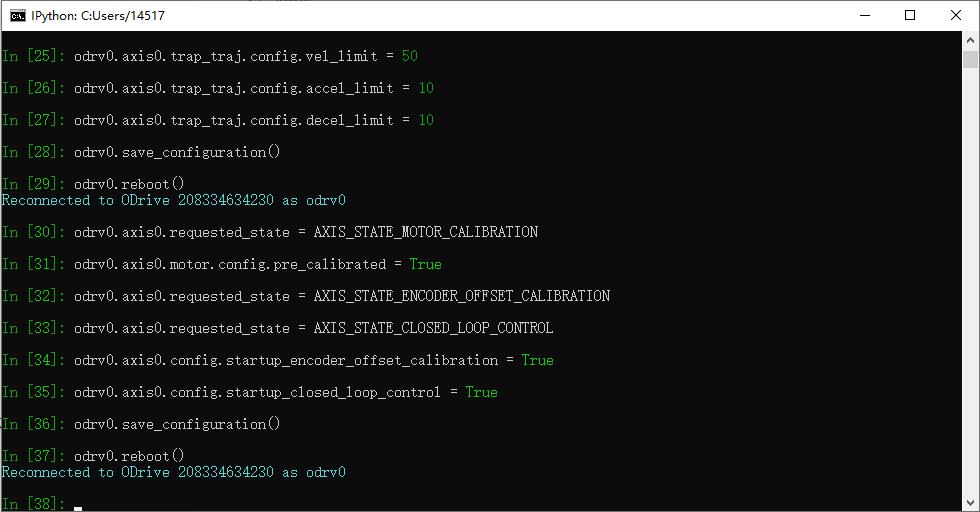
# 配置梯形模式下的电机转速阈值(转/秒)
odrv0.axis0.trap_traj.config.vel_limit = 50
# 配置梯形运动模式下的加速加速度
# 数值大小影响动作跟随效果,大则跟随快;小则跟随慢。
odrv0.axis0.trap_traj.config.accel_limit = 10
# 配置梯形运动模式下的减速加速度
# 数值大小影响动作跟随效果,大则跟随快;小则跟随慢。
odrv0.axis0.trap_traj.config.decel_limit = 10
# 保存参数
odrv0.save_configuration()
# 重启驱动器
odrv0.reboot()
上述配置完成后,会重启控制器,留意最后一条指令。

二、电机和编码器校准
电机和编码器校准,可以分为两条指令单独做,也可以用一条指令一起做。
分开做:(分开做和一起做只选择一组进行操作即可)
# 进行电机参数校准(运行后电机会发出哔~的一声)
odrv0.axis0.requested_state = AXIS_STATE_MOTOR_CALIBRATION
# 设置电机预校准。(不用每次上电都哔~的一声)
# 驱动器会将本次校准值保存,避免上电启动后自动校准,以加快启动速度。
odrv0.axis0.motor.config.pre_calibrated = True
# 进行编码器校准(运行后,电机会正转一圈再反转一圈)
odrv0.axis0.requested_state = AXIS_STATE_ENCODER_OFFSET_CALIBRATION
一起做:
# 进行电机参数和编码器校准(运行后电机会发出哔~的一声,并电机会正转一圈再反转一圈)
odrv0.axis0.requested_state = AXIS_STATE_FULL_CALIBRATION_SEQUENCE
# 设置电机预校准。(不用每次上电都哔~的一声)
# 驱动器会将本次校准值保存,避免上电启动后自动校准,以加快启动速度。
odrv0.axis0.motor.config.pre_calibrated = True
之后进入闭环模式:
# 配置电机为闭环模式
odrv0.axis0.requested_state = AXIS_STATE_CLOSED_LOOP_CONTROL
进入闭环模式后,电机会有轻微的滋滋电流声。用手扭动电机,电机会产生反抗的力矩,松手后,电机会转回原来的位置。
如手拨后,如电机未回到原来位置,或在原来位置反复运动,或者能明显感受到过冲,都需要重调1.5章节的PID参数。
最后设置为上电自动校准,自动进入闭环。
# 设置ODrive上电启动时,自动校准编码器
odrv0.axis0.config.startup_encoder_offset_calibration = True
# 设置ODrive上电启动时,自动进入闭环模式
odrv0.axis0.config.startup_closed_loop_control = True
# 保存参数
odrv0.save_configuration()
# 重启驱动器
odrv0.reboot()
重启后,电机会自动进行编码器校准,正转一圈反转一圈归位,并自动进入闭环模式。
之后可直接发送控制指令,来让电机运动。
三、下发控制指令、控制电机运行
发送控制指令,控制电机的旋转位置。
# 控制电机运行到100圈的位置
odrv0.axis0.controller.input_pos = 100
# 控制电机运行到0圈的位置
odrv0.axis0.controller.input_pos = 0
# 控制电机运行到-100圈的位置
odrv0.axis0.controller.input_pos = -100
# 释放电机(释放后,电机退出闭环模式,外力可轻松拨动电机)
odrv0.axis0.requested_state = AXIS_STATE_IDLE
# 配置电机为闭环模式
odrv0.axis0.requested_state = AXIS_STATE_CLOSED_LOOP_CONTROL
释放电机后,用手可拨动电机到任意位置。
重新进入闭环模式,电机并不会返回原来位置,请放心操作。

定位效果很好,迅速且精准。
现在的PID只是根据手感进行的粗调,略微偏软,抽空结合GUI工具进行细调,期望钉钉子的效果。
(主要是内环速度P略微一高就震荡,不敢加高。不过也可能和我没有把磁编码器的磁铁与电机轴固定好有关,现在只是让径向磁铁吸附在电机轴上,并没有用胶水固定,兴许震荡的原因和这个有些关联)
上面的操作和指令同样适用于电机1,只要将 axis0 替换为 axis1。
另外命令行与终端是一样的,用键盘上下键,可快速切换到上/下一条指令。
1.5章节的PID,是我根据自己的电机调试的,并不一定适合其他电机,可能会引发震荡。
如控制效果不理想,请重调PID。细调PID需要GUI工具,来绘制位置/速度/电流的波形,作为PID调整的参考。详见下一节。
以上是关于ODrive踩坑电机和编码器参数配置校准位置闭环模式转动电机的主要内容,如果未能解决你的问题,请参考以下文章