路径规划A*算法解决三维路径规划问题
Posted MatlabQQ1575304183
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了路径规划A*算法解决三维路径规划问题相关的知识,希望对你有一定的参考价值。
A*算法
A算法是一种典型的启发式搜索算法,建立在Dijkstra算法的基础之上,广泛应用于游戏地图、现实世界中,用来寻找两点之间的最短路径。A算法最主要的是维护了一个启发式估价函数,如式(1)所示。
f(n)=g(n)+h(n)(1)
其中,f(n)是算法在搜索到每个节点时,其对应的启发函数。它由两部分组成,第一部分g(n)是起始节点到当前节点实际的通行代价,第二部分h(n)是当前节点到终点的通行代价的估计值。算法每次在扩展时,都选取f(n)值最小的那个节点作为最优路径上的下一个节点。
在实际应用中,若以最短路程为优化目标,h(n)常取作当前点到终点的欧几里得距离(Euclidean Distance)或曼哈顿距离(Manhattan Distance)等。若令h(n)=0,表示没有利用任何当前节点与终点的信息,A*算法就退化为非启发的Dijkstra算法,算法搜索空间随之变大,搜索时间变长。
A*算法步骤如下,算法维护两个集合:P表与Q表。P表存放那些已经搜索到、但还没加入最优路径树上的节点;Q表维护那些已加入最优路径树上的节点。
(1)P表、Q表置空,将起点S加入P表,其g值置0,父节点为空,路网中其他节点g值置为无穷大。
(2)若P表为空,则算法失败。否则选取P表中f值最小的那个节点,记为BT,将其加入Q表中。判断BT是否为终点T,若是,转到步骤(3);否则根据路网拓扑属性和交通规则找到BT的每个邻接节点NT,进行下列步骤:
①计算NT的启发值
f(NT)=g(NT)+h(NT)(2)
g(NT)=g(BT)+cost(BT, NT)(3)
其中,cost(BT, NT)是BT到NT的通行代价。
②如果NT在P表中,且通过式(3)计算的g值比NT原先的g值小,则将NT的g值更新为式(3)结果,并将NT的父节点设为BT。
③如果NT在Q表中,且通过式(3)计算的g值比NT原先的g值小,则将NT的g值更新为式(3)结果,将NT的父节点设为BT,并将NT移出到P表中。
④若NT既不在P表,也不在Q表中,则将NT的父节点设为BT,并将NT移到P表中。
⑤转到步骤(2)继续执行。
(3)从终点T回溯,依次找到父节点,并加入优化路径中,直到起点S,即可得出优化路径。
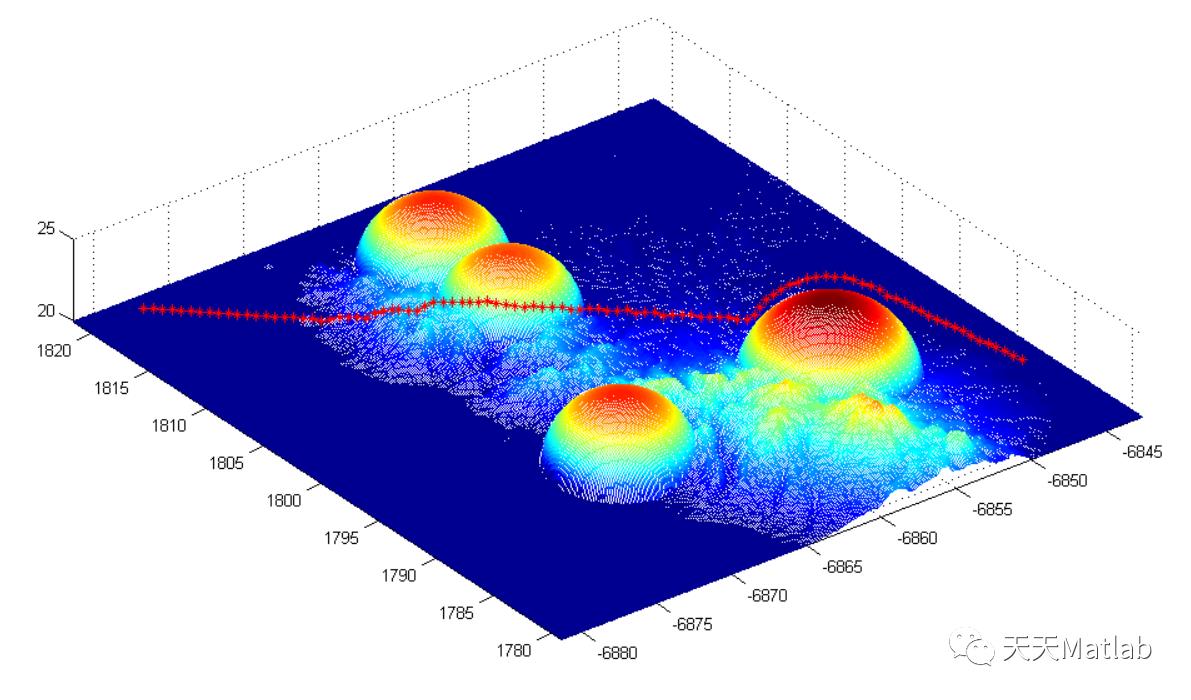
clc;clear all;[datax,datay,dataz]=loadmap('map.xyz');startpoint=[datax(1,30),datay(30,1),dataz(30,30)+0.1];%起点endpoint=[datax(1,390),datay(390,1),dataz(390,390)+0.1];%终点q=endpoint-startpoint;q=q/norm(q);direction=q;position=startpoint;limit=[pi/6,pi/6];dataz=dataz.*2.5;% r_posi=[300,320];% R=3;% dataz=radar_pos(r_posi,R,datax,datay,dataz);% r_posi1=[100,120];R1=3;r_posi2=[200,150];R2=4;r_posi3=[300,320];R3=5;r_posi4=[150,320];R4=3.5;r_posi5=[200,80];R5=4.2;% dataz=radar_pos(r_posi1,R1,datax,datay,dataz);dataz=radar_pos(r_posi2,R2,datax,datay,dataz);dataz=radar_pos(r_posi3,R3,datax,datay,dataz);dataz=radar_pos(r_posi4,R5,datax,datay,dataz);dataz=radar_pos(r_posi5,R5,datax,datay,dataz);lest=sqrt(sum((position-endpoint).^2));h=0.5;k=0;while lest>hk=k+1route(k,:)=position;[open_list,dir_list]=openlist(position,direction,h,limit);%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%fate=zeros(25,3);for i=1:25xipt=open_list(i,1);yipt=open_list(i,2);[zopt,xind,yind]= mappoint(xipt,yipt,datax,datay,dataz);if(zopt>open_list(i,3))fate(i,:)=[1,1,1];open_list(i,:)=[0,0,0];endend%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%G=k*h;H=H_func(open_list,endpoint);[mini,ind]=min(H);lest=sqrt(sum((position-endpoint).^2));F=G+mini;position=open_list(ind,:);direction=dir_list(ind,:);endx=route(:,1);y=route(:,2);z=route(:,3)+21;figure(1)mesh(datax,datay,dataz+20);hold on;% view(0,10)plot3(x,y,z,'r--*');axis equal;
以上是关于路径规划A*算法解决三维路径规划问题的主要内容,如果未能解决你的问题,请参考以下文章
三维路径规划基于matlab自适应遗传算法求解单无人机三维路径规划问题含Matlab源码 214期
A_star三维路径规划基于matlab PID控制器和 A_star算法无人机三维路径规划含Matlab源码 2244期