精品课设不同优化算法整定PID控制参数
Posted 昔时扬尘处
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了精品课设不同优化算法整定PID控制参数相关的知识,希望对你有一定的参考价值。

【精品课设】不同优化算法整定PID控制参数
0研究背景
写在前面:
1.本代码基于MATLAB2019a版本,低版本或者不同版本可能会报错,mdl文件或slx文件打开可能会失败;
2.如果运行时间过长,请观察迭代次数是否有变化。
3.本博客附上算法运行图并详细介绍,如果转载请注明出处;
4.如果本博客恰巧与您的研究有所关联,欢迎您的咨询qq1366196286

1系列博客的相关链接
参考前面的几篇博客
基于Ziegler-Nlichols方法的参数整定与PID仿真
【Simulink】PSO优化算法整定PID控制器参数(一)一一一高阶不稳定系统
【Simulink】PSO算法优化Simulink模型的参数在线整定(二)一一一高阶不稳定系统
【MATLAB】GA优化算法整定PID控制器参数(三)—— 一阶带时延的被控对象
【MATLAB】NSGA-2优化算法整定PID控制器参数(四)—— 一阶带时延的被控对象
【MATLAB】FOA优化算法整定PID控制器参数(五)—— 一阶带时延的被控对象
【MATLAB】自适应果蝇优化算法整定PID控制器参数(六)—— 一阶带时延的被控对象
2博客资源的相关介绍
本博客将基于前述博客的基础之上,在同一个被控对象的传递函数情况下进行PID控制参数的整定与优化,并且算法的基本参数尽可能的设置为相同。
以下式二阶Ⅰ型时延系统的传递函数为例,运用NSGA-2算法进行PID参数优化,其中系统设置为采样时间1 ms,指令为单位阶跃信号,仿真运行时间为1.0 s。其中,性能优化函数Best_J采取时间与误差绝对值乘积的积分方程(Integral of Time Multiplied by the Absolute Value of Error,ITAE),同时为避免控制量过大而产生超调,在性能优化函数Best_J中添加PID控制器输入量的平方项。这仅仅是其中某个目标的适应度函数,此外还需设计另外目标的适应度函数,如2.2适应度函数的设计。
二阶Ⅰ型时延系统的传递函数,如下所示。可按照自己的实际系统进行设计,既可以.m文件进行编写

2.1 资源文件的截图
资源文件的截图如下
详细给出文件夹各部分的功能说明,以及具体的对比。博主推荐,很适合学习与入手
0FOA.m为测试方案,主要是实现FOA算法的基本分析-在这里不予以给出
1FOA.m为果蝇优化算法,用于整定一阶带时延的传递函数PID控制参数
2IFOA.m为自适应果蝇优化算法,用于整定一阶带时延的传递函数PID控制参数
3PSO.m为粒子群优化算法,用于整定一阶带时延的传递函数PID控制参数
4Z-N.m为确定边界法,用于整定一阶带时延的传递函数PID控制参数
5Traditional.m为传统的PID控制,用于一阶带时延的传递函数PID控制
6GA.m为遗传优化算法,用于整定一阶带时延的传递函数PID控制参数
7NSGA_2.m为多目标遗传优化算法,用于整定一阶带时延的传递函数PID控制参数
Figure文件夹为各个算法整定的阶跃响应输出、最佳指标对比输出
shuju文件夹为Figure所需要的数据mat文件
不同算法整定PID控制参数的参考文献,主要是果蝇优化算法,如若需要遗传算法、粒子群算法可联系我,也可自行前往知网/万方/百度学术等进行关键词检索
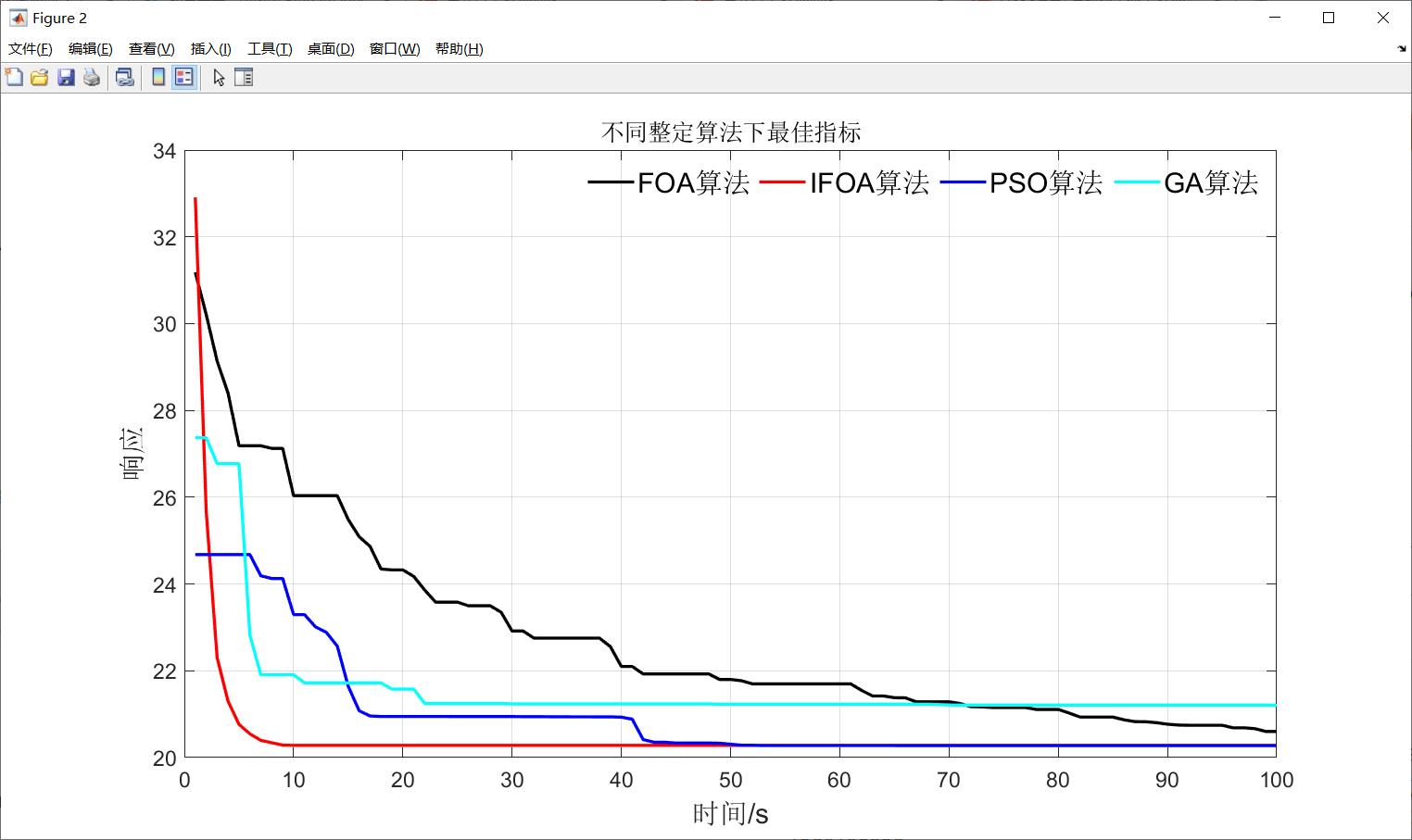
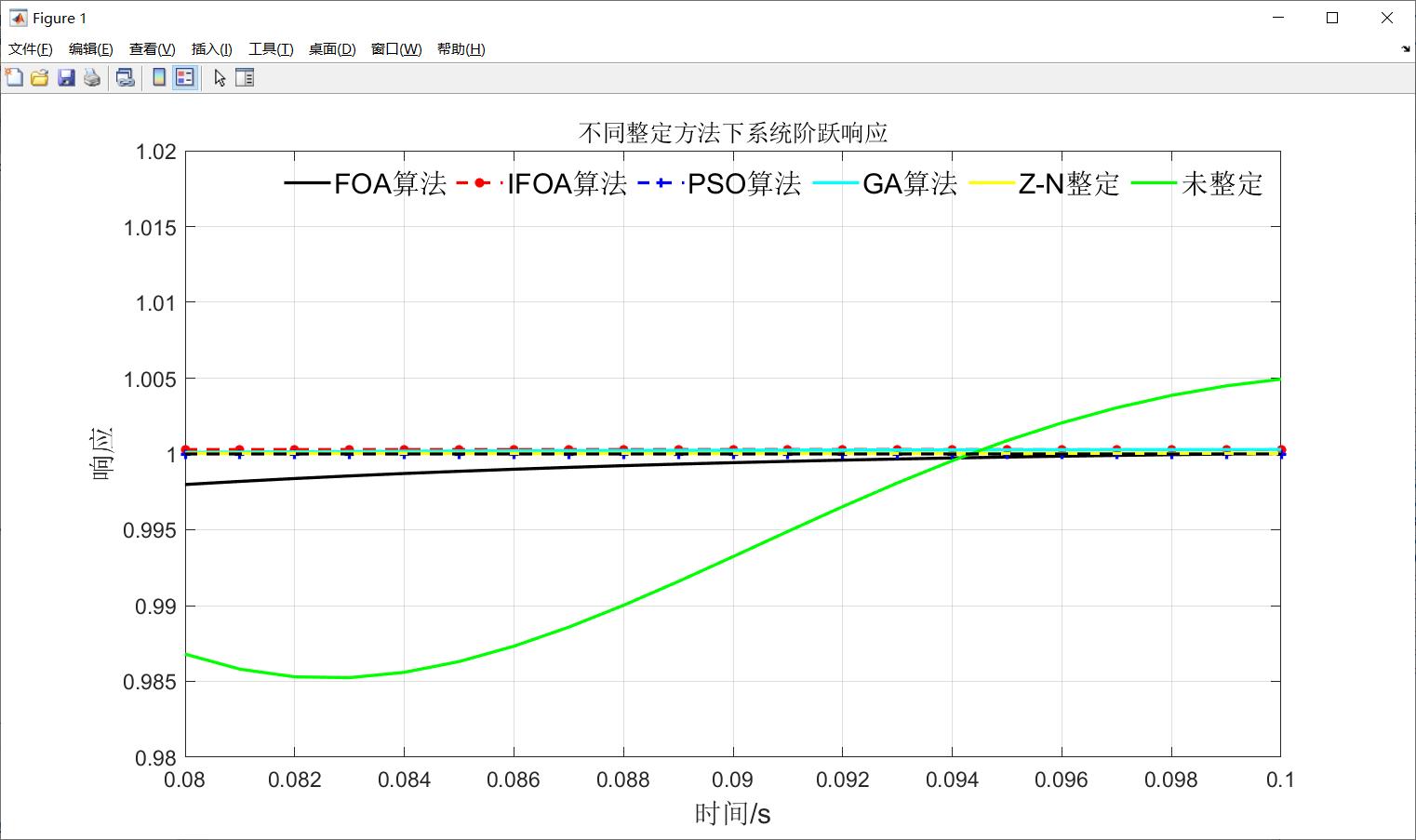
2.2 不同算法的对比
最佳指标适应度值如下
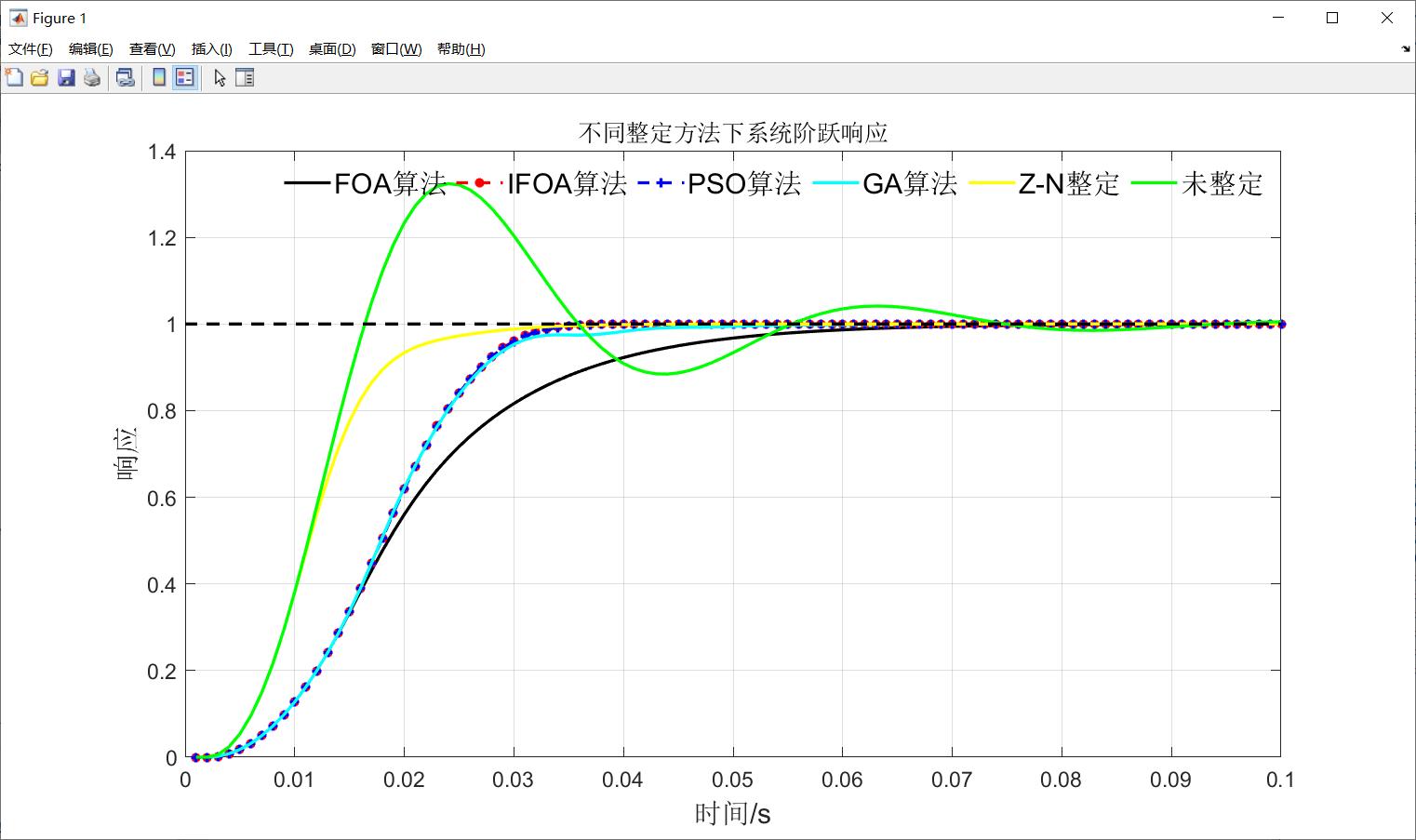
阶跃响应输出如下
3总结
博主也在复现期刊论上的算法进行PID控制器参数整定,也可以应用于其他的被控对象的传递函数,或者Simulink仿真对象等。后续也会出一系列的博文及资源。只要精通了算法,优化对象的改变并不会影响整个代码的使用。也支持一定的代做需求,可联系我qq1366196286。
以上是关于精品课设不同优化算法整定PID控制参数的主要内容,如果未能解决你的问题,请参考以下文章