文献阅读16期:Deep Learning on Graphs: A Survey - 5
Posted RaZLeon
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了文献阅读16期:Deep Learning on Graphs: A Survey - 5相关的知识,希望对你有一定的参考价值。
[ 文献阅读·综述 ] Deep Learning on Graphs: A Survey [1]
推荐理由:图神经网络的survey paper,在很多的领域展现出了独特的作用力,分别通过GRAPH RNN(图循环网络)、GCN(图卷积)、GRAPH AUTOENCODERS(图自编码器)、GRAPH REINFORCEMENT LEARNING(图强化学习模型)、GRAPH ADVERSARIAL METHODS(图对抗模型)等五个类型的模型进行阐述,可以让大家对图神经网络有一个整体的认识。
5.图自动编码器
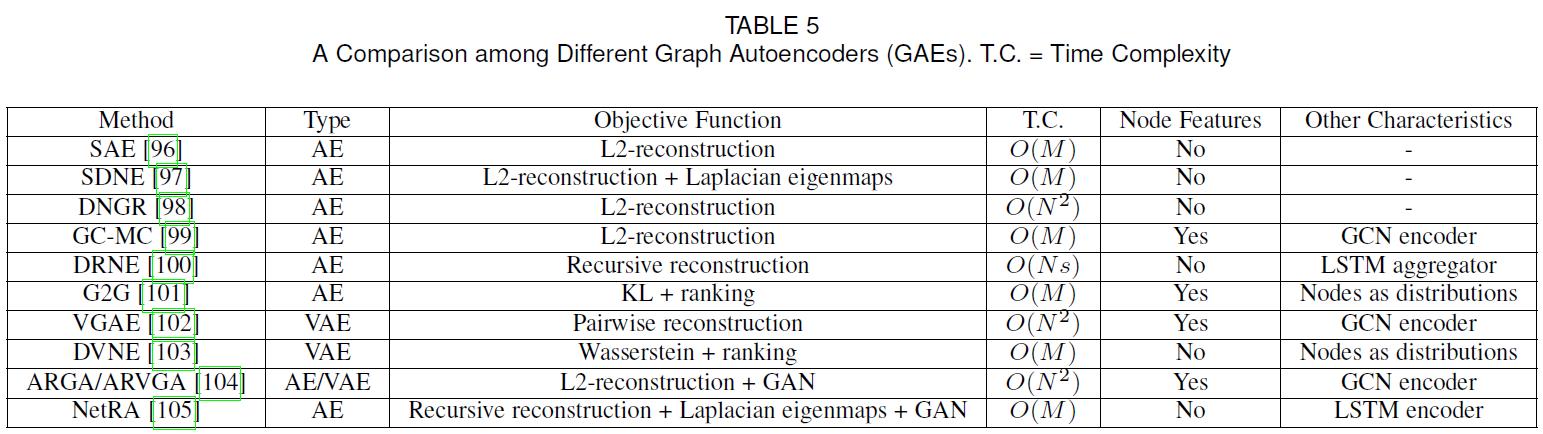
自动编码器(AE)及其变体广泛应用于无监督学习任务中,适合于学习图的节点表示。隐含的假设是,图有一个内在的,潜在的非线性低秩结构。在这一节中,本文首先阐述了图自动编码器,然后介绍了图变分自动编码器和其他改进。下表总结了GAE的主要特征:
5.1.自动编码器
- 图的自动编码器的使用起源于稀疏自动编码器(SAE)。其基本思想是,通过将邻接矩阵或其变化作为节点的原始特征,AEs可以作为一种降维技术来学习低维节点表示。具体而言,SAE采用了以下L2-reconstruction loss:
min Θ L 2 = ∑ i = 1 N ∥ P ( i , : ) − P ^ ( i , : ) ∥ 2 P ^ ( i , : ) = G ( h i ) , h i = F ( P ( i , : ) ) (43) \\begin{gathered} \\min _{\\boldsymbol{\\Theta}} \\mathcal{L}_{2}=\\sum_{i=1}^{N}\\|\\mathbf{P}(i,:)-\\hat{\\mathbf{P}}(i,:)\\|_{2} \\\\ \\hat{\\mathbf{P}}(i,:)=\\mathcal{G}\\left(\\mathbf{h}_{i}\\right), \\mathbf{h}_{i}=\\mathcal{F}(\\mathbf{P}(i,:)) \\end{gathered}\\tag{43} ΘminL2=i=1∑N∥P(i,:)−P^(i,:)∥2P^(i,:)=G(hi),hi=F(P(i,:))(43) - 然而,SAE是建立在错误的理论分析基础上的,其有效性的机制尚不清楚。
- Structure deep network embedding(SDNE)填补了这一难题,它表明等式(43)中的L2重建损失实际上对应于节点之间的二阶接近度,即如果两个节点具有相似的邻域,则它们共享相似的latten表示,这是网络科学中一个被广泛研究的概念,被称为协同过滤或三角闭包。由于网络嵌入方法表明一阶邻近性也很重要,SDNE通过添加另一个拉普拉斯特征映射项修改了目标函数:
- min Θ L 2 + α ∑ i , j = 1 N A ( i , j ) ∥ h i − h j ∥ 2 (44) \\min _{\\boldsymbol{\\Theta}} \\mathcal{L}_{2}+\\alpha \\sum_{i, j=1}^{N} \\mathbf{A}(i, j)\\left\\|\\mathbf{h}_{i}-\\mathbf{h}_{j}\\right\\|_{2}\\tag{44} ΘminL2+αi,j=1∑NA(i,j)∥hi−hj∥2(44)
- 例如,如果两个节点直接相连,它们也共享相似的潜在表示。作者还通过使用邻接矩阵并为零和非零元素分配不同的权重来修改L2重建损失:
- L 2 = ∑ i = 1 N ∥ ( A ( i , : ) − G ( h i ) ) ⊙ b i ∥ 2 (45) \\mathcal{L}_{2}=\\sum_{i=1}^{N}\\left\\|\\left(\\mathbf{A}(i,:)-\\mathcal{G}\\left(\\mathbf{h}_{i}\\right)\\right) \\odot \\mathbf{b}_{i}\\right\\|_{2}\\tag{45} L2=i=1∑N∥(A(i,:)−G(hi))⊙bi∥2(45)
- GC-MC采用了不同的方法,使用Kipf和Welling提出的GCN作为编码器:
H = G C N ( F V , A ) (46) \\mathbf{H}=G C N\\left(\\mathbf{F}^{V}, \\mathbf{A}\\right)\\tag{46} H=GCN(FV,A)(46)
其使用简单的双线性函数作为解码器:
A ^ ( i , j ) = H ( i , : ) Θ d e H ( j , : ) T (47) \\hat{\\mathbf{A}}(i, j)=\\mathbf{H}(i,:) \\Theta_{d e} \\mathbf{H}(j,:)^{T}\\tag{47} A^(i,j)=H(i,:)ΘdeH(j,:)T(47) - DRNE没有重建邻接矩阵或其变体,而是提出了另一种改进方法,通过使用LSTM聚集邻域信息来直接重建低维节点向量。具体而言,DRNE采用了以下目标函数:
L = ∑ i = 1 N ∥ h i − LSTM ( { h j ∣ j ∈ N ( i ) } ) ∥ (48) \\mathcal{L}=\\sum_{i=1}^{N}\\left\\|\\mathbf{h}_{i}-\\operatorname{LSTM}\\left(\\left\\{\\mathbf{h}_{j} \\mid j \\in \\mathcal{N}(i)\\right\\}\\right)\\right\\|\\tag{48} L=i=1∑N∥hi−LSTM({hj∣j∈N(i)})∥(48) - Graph2Gauss (G2G)将每个节点编码为高斯分布
h
i
=
N
(
M
(
i
,
:
)
,
diag
(
Σ
(
i
,
:
)
)
)
\\mathbf{h}_{i}=\\mathcal{N}(\\mathbf{M}(i,:), \\operatorname{diag}(\\Sigma(i,:)))
hi=N(M(i,:),diag(Σ(i,:)))来获得节点的不确定性。具体而言,作者使用从节点属性到高斯分布均值和方差的深度映射作为编码器:
M ( i , : ) = F M ( F V ( i , : ) ) , Σ ( i , : ) = F Σ ( F V ( i , : ) ) (49) \\mathbf{M}(i,:)=\\mathcal{F}_{\\mathbf{M}}\\left(\\mathbf{F}^{V}(i,:)\\right), \\mathbf{\\Sigma}(i,:)=\\mathcal{F}_{\\mathbf{\\Sigma}}\\left(\\mathbf{F}^{V}(i,:)\\right)\\tag{49} M(i,:)=FM(FV(i,:)),Σ(i,:)=FΣ(FV(i,:))(49) - 他们不使用显式解码器函数,而是使用成对约束来学习模型:
- K L ( h j ∥ h i ) < K L ( h j ′ ∥ h i ) ∀ i , ∀ j , ∀ j ′ s.t. d ( i , j ) < d ( i , j ′ ) (50) \\begin{array}{r} \\mathrm{KL}\\left(\\mathbf{h}_{j} \\| \\mathbf{h}_{i}\\right)<\\mathrm{KL}\\left(\\mathbf{h}_{j^{\\prime}} \\| \\mathbf{h}_{i}\\right) \\\\ \\forall i, \\forall j, \\forall j^{\\prime} \\text { s.t. } d(i, j)<d\\left(i, j^{\\prime}\\right) \\end{array}\\tag{50} KL(hj∥hi)<KL(hj′∥hi)∀i,∀j,∀j