机器人编程趣味实践14-机器人三维仿真(Gazebo+TurtleBot3)
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了机器人编程趣味实践14-机器人三维仿真(Gazebo+TurtleBot3)相关的知识,希望对你有一定的参考价值。
之前,介绍了节点、主题、服务和行动等基本概念,以及rqt和rosbag2等工具。
采用了官方改版的二维环境,那么现在玩耍一下更为逼真的三维仿真环境吧。
- 仿真软件Gazebo
- 机器人TurtleBot3
TurtleBot3支持仿真开发环境,可以在仿真中用虚拟机器人编程开发。 有两种开发环境可以做到这一点,一种是使用带有 3D 可视化工具 RViz 的假节点,另一种是使用 3D 机器人模拟器 Gazebo。
- 假节点适合用机器人模型和运动进行测试,但不支持传感器。
- 如果需要执行 SLAM 或导航,Gazebo 将是一个可行的解决方案,因为它支持 IMU、LDS 和摄像头等传感器。
环境配置
# TURTLEBOT3_MODEL
export GAZEBO_MODEL_PATH=$GAZEBO_MODEL_PATH:/home/zhangrelay/RobSoft/turtlebot3/src/simulations/turtlebot3_gazebo/models
export TURTLEBOT3_MODEL=burger
# ROS2
source /opt/ros/foxy/setup.bash
#colcon
source /usr/share/colcon_cd/function/colcon_cd.sh源码编译
可以使用deb直接安装:
- sudo apt install ros-foxy-turtlebot3-gazebo
注意包要装全。
这里,采用源码编译如下:
- colcon build
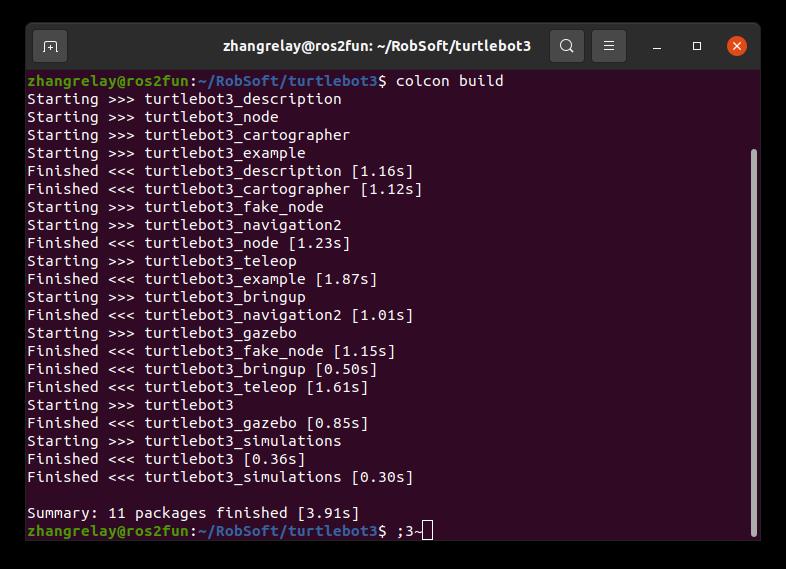
功能包列表如上所示。
仿真实践
1 启动环境
- ros2 launch turtlebot3_gazebo empty_world.launch.py
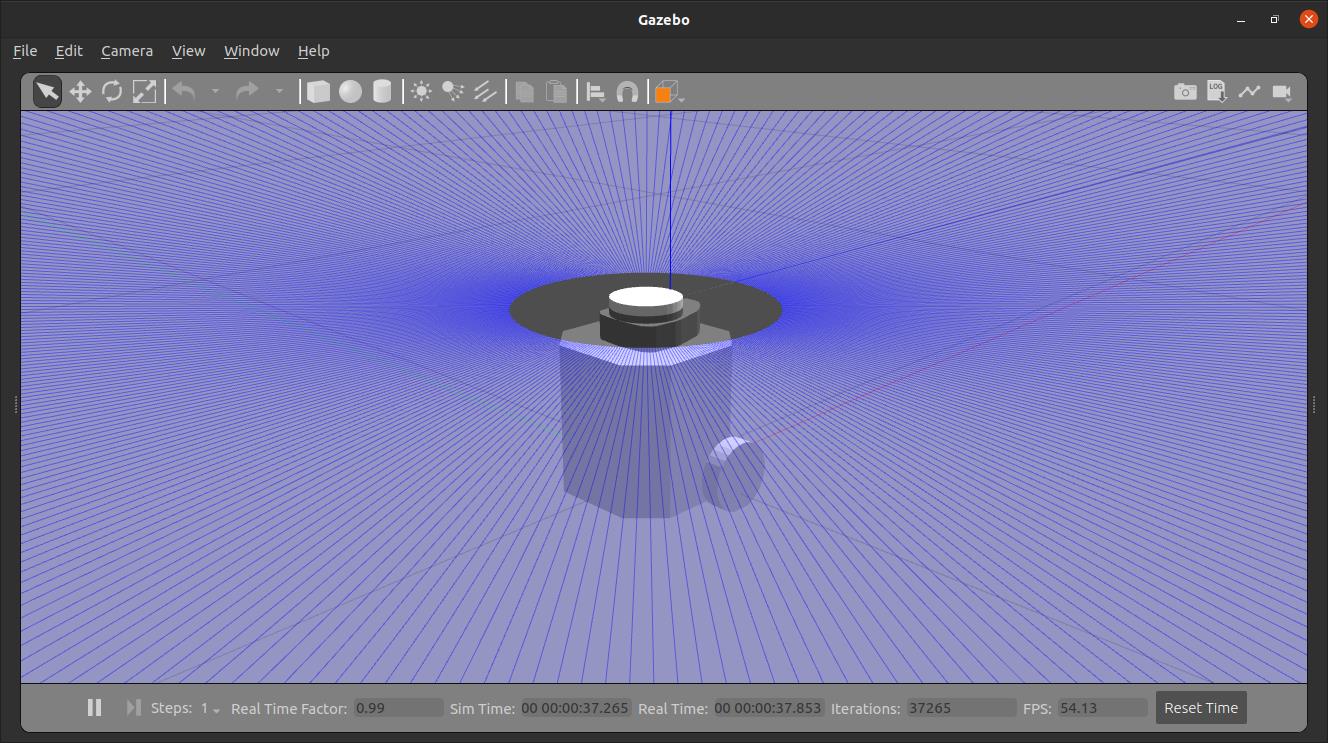
蓝色射线为激光的可视化效果。
empty_world.launch代码如下:
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import ExecuteProcess
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch.substitutions import LaunchConfiguration
TURTLEBOT3_MODEL = os.environ['TURTLEBOT3_MODEL']
def generate_launch_description():
use_sim_time = LaunchConfiguration('use_sim_time', default='True')
world_file_name = 'empty_worlds/' + TURTLEBOT3_MODEL + '.model'
world = os.path.join(get_package_share_directory('turtlebot3_gazebo'),
'worlds', world_file_name)
launch_file_dir = os.path.join(get_package_share_directory('turtlebot3_gazebo'), 'launch')
pkg_gazebo_ros = get_package_share_directory('gazebo_ros')
return LaunchDescription([
IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(pkg_gazebo_ros, 'launch', 'gzserver.launch.py')
),
launch_arguments={'world': world}.items(),
),
IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(pkg_gazebo_ros, 'launch', 'gzclient.launch.py')
),
),
ExecuteProcess(
cmd=['ros2', 'param', 'set', '/gazebo', 'use_sim_time', use_sim_time],
output='screen'),
IncludeLaunchDescription(
PythonLaunchDescriptionSource([launch_file_dir, '/robot_state_publisher.launch.py']),
launch_arguments={'use_sim_time': use_sim_time}.items(),
),
])2 圆周运动
之前和之前二维环境圆周运动的指令非常类似哦。
- ros2 topic pub --rate 2 /cmd_vel geometry_msgs/msg/Twist "{linear: {x: 1.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 0.8}}"

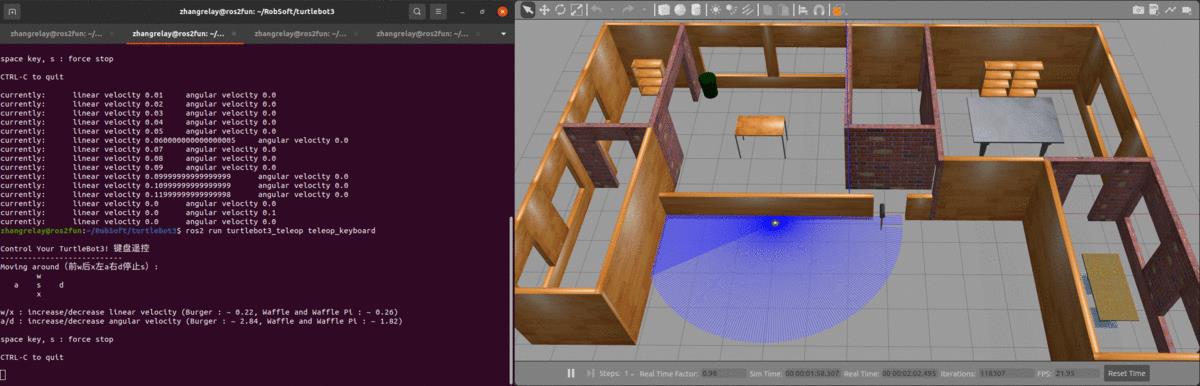
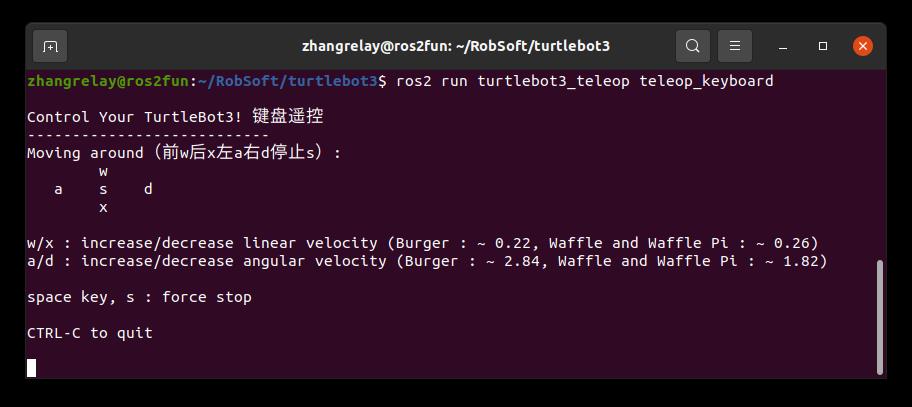
3 键盘遥控
使用如下命令启动键盘遥控:
- ros2 run turtlebot3_teleop teleop_keyboard

键盘遥控代码如下:
import os
import select
import sys
import rclpy
from geometry_msgs.msg import Twist
from rclpy.qos import QoSProfile
if os.name == 'nt':
import msvcrt
else:
import termios
import tty
BURGER_MAX_LIN_VEL = 0.22
BURGER_MAX_ANG_VEL = 2.84
WAFFLE_MAX_LIN_VEL = 0.26
WAFFLE_MAX_ANG_VEL = 1.82
LIN_VEL_STEP_SIZE = 0.01
ANG_VEL_STEP_SIZE = 0.1
TURTLEBOT3_MODEL = os.environ['TURTLEBOT3_MODEL']
msg = """
Control Your TurtleBot3!
---------------------------
Moving around:
w
a s d
x
w/x : increase/decrease linear velocity (Burger : ~ 0.22, Waffle and Waffle Pi : ~ 0.26)
a/d : increase/decrease angular velocity (Burger : ~ 2.84, Waffle and Waffle Pi : ~ 1.82)
space key, s : force stop
CTRL-C to quit
"""
e = """
Communications Failed
"""
def get_key(settings):
if os.name == 'nt':
return msvcrt.getch().decode('utf-8')
tty.setraw(sys.stdin.fileno())
rlist, _, _ = select.select([sys.stdin], [], [], 0.1)
if rlist:
key = sys.stdin.read(1)
else:
key = ''
termios.tcsetattr(sys.stdin, termios.TCSADRAIN, settings)
return key
def print_vels(target_linear_velocity, target_angular_velocity):
print('currently:\\tlinear velocity {0}\\t angular velocity {1} '.format(
target_linear_velocity,
target_angular_velocity))
def make_simple_profile(output, input, slop):
if input > output:
output = min(input, output + slop)
elif input < output:
output = max(input, output - slop)
else:
output = input
return output
def constrain(input_vel, low_bound, high_bound):
if input_vel < low_bound:
input_vel = low_bound
elif input_vel > high_bound:
input_vel = high_bound
else:
input_vel = input_vel
return input_vel
def check_linear_limit_velocity(velocity):
if TURTLEBOT3_MODEL == 'burger':
return constrain(velocity, -BURGER_MAX_LIN_VEL, BURGER_MAX_LIN_VEL)
else:
return constrain(velocity, -WAFFLE_MAX_LIN_VEL, WAFFLE_MAX_LIN_VEL)
def check_angular_limit_velocity(velocity):
if TURTLEBOT3_MODEL == 'burger':
return constrain(velocity, -BURGER_MAX_ANG_VEL, BURGER_MAX_ANG_VEL)
else:
return constrain(velocity, -WAFFLE_MAX_ANG_VEL, WAFFLE_MAX_ANG_VEL)
def main():
settings = None
if os.name != 'nt':
settings = termios.tcgetattr(sys.stdin)
rclpy.init()
qos = QoSProfile(depth=10)
node = rclpy.create_node('teleop_keyboard')
pub = node.create_publisher(Twist, 'cmd_vel', qos)
status = 0
target_linear_velocity = 0.0
target_angular_velocity = 0.0
control_linear_velocity = 0.0
control_angular_velocity = 0.0
try:
print(msg)
while(1):
key = get_key(settings)
if key == 'w':
target_linear_velocity =\\
check_linear_limit_velocity(target_linear_velocity + LIN_VEL_STEP_SIZE)
status = status + 1
print_vels(target_linear_velocity, target_angular_velocity)
elif key == 'x':
target_linear_velocity =\\
check_linear_limit_velocity(target_linear_velocity - LIN_VEL_STEP_SIZE)
status = status + 1
print_vels(target_linear_velocity, target_angular_velocity)
elif key == 'a':
target_angular_velocity =\\
check_angular_limit_velocity(target_angular_velocity + ANG_VEL_STEP_SIZE)
status = status + 1
print_vels(target_linear_velocity, target_angular_velocity)
elif key == 'd':
target_angular_velocity =\\
check_angular_limit_velocity(target_angular_velocity - ANG_VEL_STEP_SIZE)
status = status + 1
print_vels(target_linear_velocity, target_angular_velocity)
elif key == ' ' or key == 's':
target_linear_velocity = 0.0
control_linear_velocity = 0.0
target_angular_velocity = 0.0
control_angular_velocity = 0.0
print_vels(target_linear_velocity, target_angular_velocity)
else:
if (key == '\\x03'):
break
if status == 20:
print(msg)
status = 0
twist = Twist()
control_linear_velocity = make_simple_profile(
control_linear_velocity,
target_linear_velocity,
(LIN_VEL_STEP_SIZE / 2.0))
twist.linear.x = control_linear_velocity
twist.linear.y = 0.0
twist.linear.z = 0.0
control_angular_velocity = make_simple_profile(
control_angular_velocity,
target_angular_velocity,
(ANG_VEL_STEP_SIZE / 2.0))
twist.angular.x = 0.0
twist.angular.y = 0.0
twist.angular.z = control_angular_velocity
pub.publish(twist)
except Exception as e:
print(e)
finally:
twist = Twist()
twist.linear.x = 0.0
twist.linear.y = 0.0
twist.linear.z = 0.0
twist.angular.x = 0.0
twist.angular.y = 0.0
twist.angular.z = 0.0
pub.publish(twist)
if os.name != 'nt':
termios.tcsetattr(sys.stdin, termios.TCSADRAIN, settings)
if __name__ == '__main__':
main()简单加入中文方便使用:
阅读源码非常重要。
4 节点
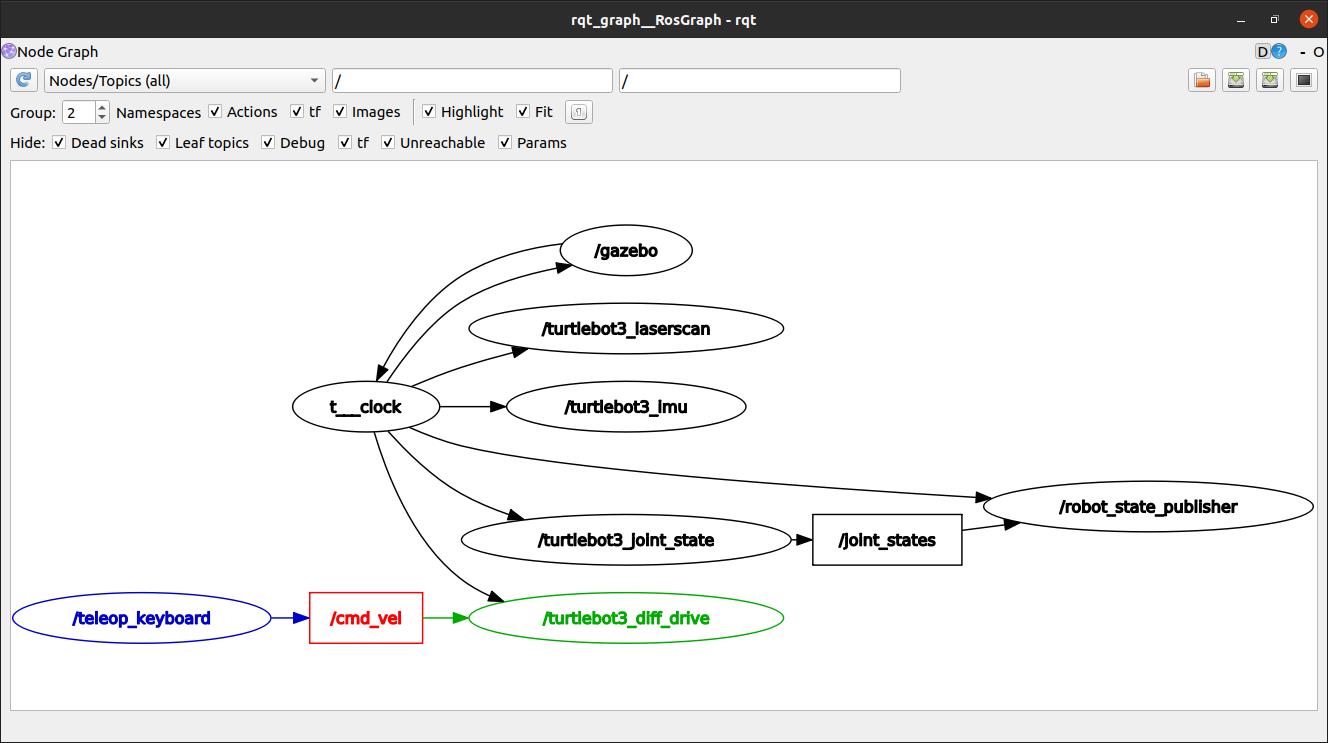
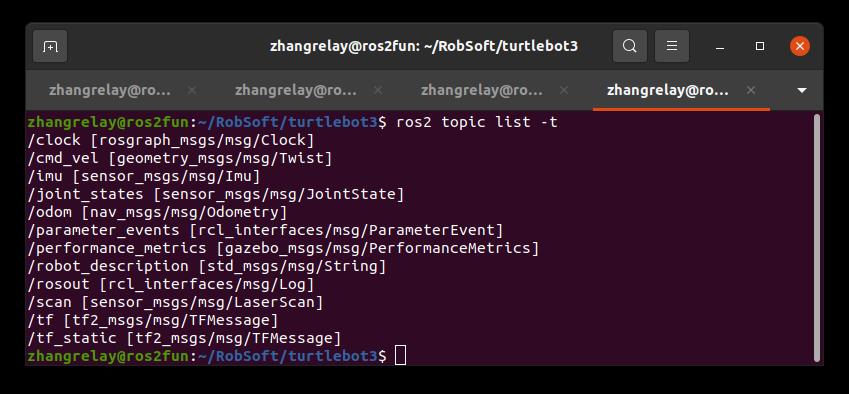
5 主题
6 服务
ros2 service list -t
- /apply_joint_effort [gazebo_msgs/srv/ApplyJointEffort]
- /apply_link_wrench [gazebo_msgs/srv/ApplyLinkWrench]
- /clear_joint_efforts [gazebo_msgs/srv/JointRequest]
- /clear_link_wrenches [gazebo_msgs/srv/LinkRequest]
- /delete_entity [gazebo_msgs/srv/DeleteEntity]
- /gazebo/describe_parameters [rcl_interfaces/srv/DescribeParameters]
- /gazebo/get_parameter_types [rcl_interfaces/srv/GetParameterTypes]
- /gazebo/get_parameters [rcl_interfaces/srv/GetParameters]
- /gazebo/list_parameters [rcl_interfaces/srv/ListParameters]
- /gazebo/set_parameters [rcl_interfaces/srv/SetParameters]
- /gazebo/set_parameters_atomically [rcl_interfaces/srv/SetParametersAtomically]
- /get_model_list [gazebo_msgs/srv/GetModelList]
- /pause_physics [std_srvs/srv/Empty]
- /reset_simulation [std_srvs/srv/Empty]
- /reset_world [std_srvs/srv/Empty]
- /robot_state_publisher/describe_parameters [rcl_interfaces/srv/DescribeParameters]
- /robot_state_publisher/get_parameter_types [rcl_interfaces/srv/GetParameterTypes]
- /robot_state_publisher/get_parameters [rcl_interfaces/srv/GetParameters]
- /robot_state_publisher/list_parameters [rcl_interfaces/srv/ListParameters]
- /robot_state_publisher/set_parameters [rcl_interfaces/srv/SetParameters]
- /robot_state_publisher/set_parameters_atomically [rcl_interfaces/srv/SetParametersAtomically]
- /rqt_gui_py_node_4338/describe_parameters [rcl_interfaces/srv/DescribeParameters]
- /rqt_gui_py_node_4338/get_parameter_types [rcl_interfaces/srv/GetParameterTypes]
- /rqt_gui_py_node_4338/get_parameters [rcl_interfaces/srv/GetParameters]
- /rqt_gui_py_node_4338/list_parameters [rcl_interfaces/srv/ListParameters]
- /rqt_gui_py_node_4338/set_parameters [rcl_interfaces/srv/SetParameters]
- /rqt_gui_py_node_4338/set_parameters_atomically [rcl_interfaces/srv/SetParametersAtomically]
- /spawn_entity [gazebo_msgs/srv/SpawnEntity]
- /teleop_keyboard/describe_parameters [rcl_interfaces/srv/DescribeParameters]
- /teleop_keyboard/get_parameter_types [rcl_interfaces/srv/GetParameterTypes]
- /teleop_keyboard/get_parameters [rcl_interfaces/srv/GetParameters]
- /teleop_keyboard/list_parameters [rcl_interfaces/srv/ListParameters]
- /teleop_keyboard/set_parameters [rcl_interfaces/srv/SetParameters]
- /teleop_keyboard/set_parameters_atomically [rcl_interfaces/srv/SetParametersAtomically]
- /turtlebot3_diff_drive/describe_parameters [rcl_interfaces/srv/DescribeParameters]
- /turtlebot3_diff_drive/get_parameter_types [rcl_interfaces/srv/GetParameterTypes]
- /turtlebot3_diff_drive/get_parameters [rcl_interfaces/srv/GetParameters]
- /turtlebot3_diff_drive/list_parameters [rcl_interfaces/srv/ListParameters]
- /turtlebot3_diff_drive/set_parameters [rcl_interfaces/srv/SetParameters]
- /turtlebot3_diff_drive/set_parameters_atomically [rcl_interfaces/srv/SetParametersAtomically]
- /turtlebot3_imu/describe_parameters [rcl_interfaces/srv/DescribeParameters]
- /turtlebot3_imu/get_parameter_types [rcl_interfaces/srv/GetParameterTypes]
- /turtlebot3_imu/get_parameters [rcl_interfaces/srv/GetParameters]
- /turtlebot3_imu/list_parameters [rcl_interfaces/srv/ListParameters]
- /turtlebot3_imu/set_parameters [rcl_interfaces/srv/SetParameters]
- /turtlebot3_imu/set_parameters_atomically [rcl_interfaces/srv/SetParametersAtomically]
- /turtlebot3_joint_state/describe_parameters [rcl_interfaces/srv/DescribeParameters]
- /turtlebot3_joint_state/get_parameter_types [rcl_interfaces/srv/GetParameterTypes]
- /turtlebot3_joint_state/get_parameters [rcl_interfaces/srv/GetParameters]
- /turtlebot3_joint_state/list_parameters [rcl_interfaces/srv/ListParameters]
- /turtlebot3_joint_state/set_parameters [rcl_interfaces/srv/SetParameters]
- /turtlebot3_joint_state/set_parameters_atomically [rcl_interfaces/srv/SetParametersAtomically]
- /turtlebot3_laserscan/describe_parameters [rcl_interfaces/srv/DescribeParameters]
- /turtlebot3_laserscan/get_parameter_types [rcl_interfaces/srv/GetParameterTypes]
- /turtlebot3_laserscan/get_parameters [rcl_interfaces/srv/GetParameters]
- /turtlebot3_laserscan/list_parameters [rcl_interfaces/srv/ListParameters]
- /turtlebot3_laserscan/set_parameters [rcl_interfaces/srv/SetParameters]
- /turtlebot3_laserscan/set_parameters_atomically [rcl_interfaces/srv/SetParametersAtomically]
- /unpause_physics [std_srvs/srv/Empty]
7 行动
SLAM和导航时候再补充。
8 更多
可参考前13篇中对应案例,在此三维环境中进行实践哦。
总结
由二维环境到三维环境,仿真更炫酷,但是原理和指令几乎一样,学一招全掌控!
以上是关于机器人编程趣味实践14-机器人三维仿真(Gazebo+TurtleBot3)的主要内容,如果未能解决你的问题,请参考以下文章