路径规划基于RRT实现路径规划
Posted MatlabQQ1575304183
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了路径规划基于RRT实现路径规划相关的知识,希望对你有一定的参考价值。
一、简介
RRT(快速探索随机树) 是一种通用的方法,不管什么机器人类型、不管自由度是多少、不管约束有多复杂都能用。而且它的原理很简单,这是它在机器人领域流行的主要原因之一。不过它的缺点也很明显,它得到的路径一般质量都不是很好,例如可能包含棱角,不够光滑,通常也远离最优路径。
RRT 能在众多的规划方法中脱颖而出,它到底厉害在哪里呢?
天下武功唯快不破,“快”是 RRT 的一大优点。RRT 的思想是快速扩张一群像树一样的路径以探索(填充)空间的大部分区域,伺机找到可行的路径。之所以选择“树”是因为它能够探索空间。我们知道,阳光几乎是树木唯一的能量来源。为了最大程度地利用阳光,树木要用尽量少的树枝占据尽量多的空间。当然了,能探索空间的不一定非得是树,比如Peano曲线也可以做到,而且要多密有多密,如上图左所示的例子。虽然像Peano曲线这样的单条连续曲线也能探索空间,但是它太“确定”了。在搜索轨迹的时候我们可不知道出路应该在哪里,如果不在“确定”的搜索方向上,我们怎么找也找不到(找到的概率是0)。这时“随机”的好处就体现出来了,虽然不知道出路在哪里,但是通过随机的反复试探还是能碰对的,而且碰对的概率随着试探次数的增多越来越大,就像买彩票一样,买的数量越多中奖的概率越大(RRT名字中“随机”的意思)。可是随机试探也讲究策略,如果我们从树中随机取一个点,然后向着随机的方向生长,那么结果是什么样的呢?见上图右。可以看到,同样是随机树,但是这棵树并没很好地探索空间,它一直在起点(红点)附近打转。这可不好,我们希望树尽量经济地、均匀地探索空间,不要过度探索一个地方,更不能漏掉大部分地方。这样的一棵树怎么构造呢?
RRT 的基本步骤是:
1. 起点作为一颗种子,从它开始生长枝丫;
2. 在机器人的“构型”空间中,生成一个随机点 ;
3. 在树上找到距离 最近的那个点,记为 吧;
4. 朝着 的方向生长,如果没有碰到障碍物就把生长后的树枝和端点添加到树上,返回 2;
随机点一般是均匀分布的,所以没有障碍物时树会近似均匀地向各个方向生长,这样可以快速探索空间(RRT名字中“快速探索”的意思)。当然如果你事先掌握了最有可能发现路径的区域信息,可以集中兵力重点探索这个区域,这时就不宜用均匀分布了。
RRT 的一个弱点是难以在有狭窄通道的环境找到路径。因为狭窄通道面积小,被碰到的概率低,找到路径需要的时间要看运气了。下图展示的例子是 RRT 应对一个人为制作的很短的狭窄通道,有时RRT很快就找到了出路,有时则一直被困在障碍物里面。


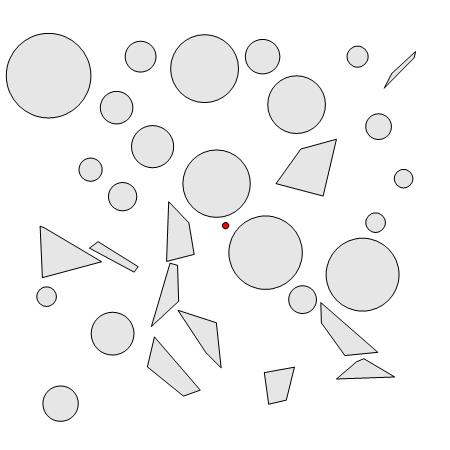
RRT探索空间的能力还是不错的,例如下图左所示的例子,障碍物多而且杂乱(借助 Mathematica 本身具有的强大函数库,实现这个例子所需的所有代码应该不会超过30行)。还有没有环境能难住RRT呢?下图右所示的迷宫对RRT就是个挑战。这个时候空间被分割得非常严重,RRT显得有些力不从心了,可见随机策略不是什么时候都有效的。
“随机”使得RRT有很强的探索能力。但是成也萧何败也萧何,“随机”也导致 RRT 很盲目,像个无头苍蝇一样到处乱撞。如果机器人对环境一无所知,那么采用随机的策略可以接受。可实际情况是,机器人对于它的工作环境多多少少是知道一些的(即使不是完全知道)。我的博客一直强调信息对于机器人的重要性。这些已知的信息就可以用来改进算法。一个改进的办法就是给它一双“慧眼”:在势场法中,势函数携带了障碍物和目标的信息,如果能把这个信息告诉 RRT,让它在探索空间时有倾向地沿着势场的方向前进会更好。这样,RRT 出色的探索能力刚好可以弥补势场法容易陷入局部极小值的缺点。

二、代码
close(findobj('type','figure','name','RRT w/ Dubins curve'));
close(findobj('type','figure','name','RRT growing'));
clear;
% Planning area initialization
height = 10;
width = 10;
center = [0, 0];
% Initial condition of [x, y, direction]
origin = [1,2, 20*pi/180];
turning_rad = 0.5; % dubins turning raduis
% Define iterations count
iteration = 100;
offset = center - [width, height]./2;
th_range = 2*pi; % do not change without knowledge about Dubins
th_center = 0;
th_offset = 0;
% prelocation of data
edges.x = zeros(iteration,2);
edges.y = zeros(iteration,2);
edges.th = zeros(iteration,2);
edges.param(iteration).p_init = [0, 0, 0]; % the initial configuration
edges.param(iteration).seg_param = [0, 0, 0]; % the lengths of the three segments
edges.param(iteration).r = turning_rad; % model forward velocity / model angular velocity turning radius
edges.param(iteration).type = -1; % path type. one of LSL, LSR, ...
edges.param(iteration).flag = 0;
vertecies = origin;
vert_count = 1;
ind_nearest = zeros(iteration,1);
edge_count = 0;
% figure('name', 'RRT growing'); % originally for real-time animation
tic;
for i=1:iteration
% random point generation
x_rand = width*rand() + offset(1);
y_rand = height*rand() + offset(2);
th_rand = th_range*rand() + th_offset;
% connect to nearest point
[ind_nearest(i),param_nearest] = dubins_searchn(vertecies, [x_rand, y_rand, th_rand], turning_rad);
% edge_rand = [x_rand, y_rand, th_rand ; vertecies(ind_nearest(i),:)];
% check availablility, see dubins_core.m for more info
if( param_nearest.flag < 0)
% goto next loop
%i = i-1; %doesn't work under MATLAB
else
% append the newly generated point and edge to the existing list
vertecies(vert_count+1,:) = [x_rand, y_rand, th_rand];
vert_count = vert_count + 1;
edges.x(edge_count+1,:) = [vertecies(ind_nearest(i),1), x_rand];
edges.y(edge_count+1,:) = [vertecies(ind_nearest(i),2), y_rand];
edges.th(edge_count+1,:) = [vertecies(ind_nearest(i),3), th_rand];
edges.param(edge_count+1) = param_nearest;
edge_count = edge_count + 1;
end
% plot animation here is undoable probably due to MATLAB running
% optimization...
% scatter(x_rand, y_rand, 10,'filled'); hold on;
% plot([vertecies(ind_nearest(i),1); x_rand], [vertecies(ind_nearest(i),2); y_rand]); hold on;
end
toc;
clear i x_rand y_rand edge_rand th_rand param_nearest
figure('name', 'RRT w/ Dubins curve');
plot_RRT_Dubins(gca, vertecies, edges, vert_count);
% plot bounderies
boundary = [offset; offset+[width 0]; offset+[width height]; offset+[0 height]; offset];
plot(boundary(:,1),boundary(:,2),'--r');三、结果展示

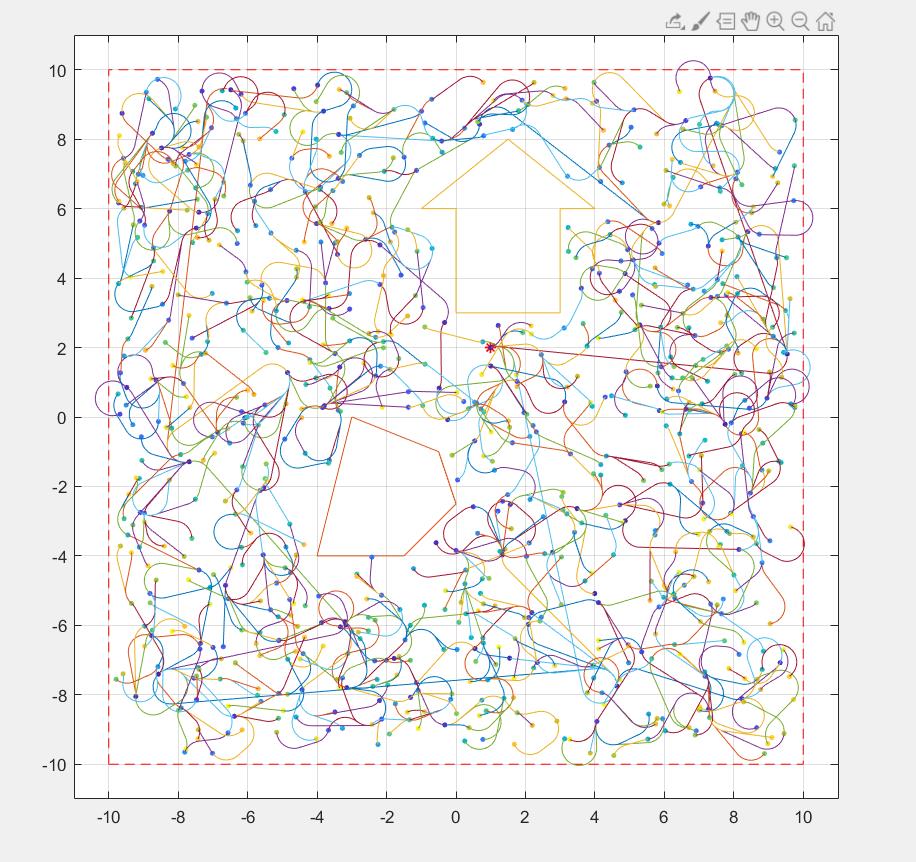

以上是关于路径规划基于RRT实现路径规划的主要内容,如果未能解决你的问题,请参考以下文章
路径规划基于matlab RRT算法机器人最短路径规划含Matlab源码 1391期
三维路径规划基于matlab RRT_Star算法三维路径规划含Matlab源码 1571期
路径规划基于matlab RRT算法求解机器人避障路径规划问题含Matlab源码 319期
三维路径规划基于matlab RRT算法无人机三维路径规划含Matlab源码 1363期