数据结构--排序
Posted 水澹澹兮生烟.
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了数据结构--排序相关的知识,希望对你有一定的参考价值。
文章目录
1.排序的概念
排序:所谓排序,就是使一串记录,按照其中的某个或某些关键字的大小,递增或递减的排列起来的操作。
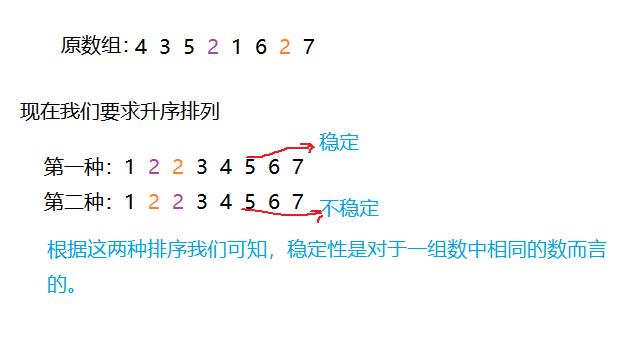
稳定性:在原序列中,r[i]=r[j],且r[i]在r[j]之前,而在排序后的序列中,r[i]仍在r[j]之前,则称这种排序算法是稳定的;否则称为不稳定的。
内部排序:将数据一次性加载到内存中。
外部排序:数据元素太多不能同时放在内存中,根据排序过程的要求不能在内外存之间移动数据的排序。
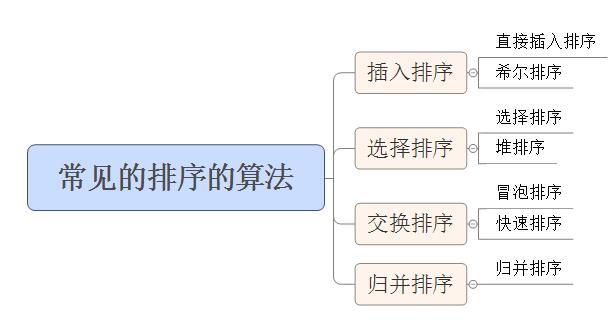
2.常见的排序算法
2.1插入排序–直接插入排序
单个元素的插入
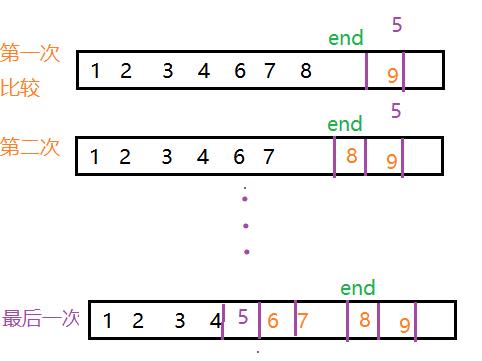
给定一组元素[1,2,3,4,6,7,8,9] ,将5插入这组元素中,首先要进行插入,必须满足原数据已经排好序列,然后从后向前比较(这样可以直接将数据进行向后搬移),进行插入。如下图:
while(key<array[end]){
array[end+1]=array[end];
end--;
}
array[end+1]=key;
现在我们给出一组无序数据,用进行快速排序。与上面的原理相同,我们可以从数据的第二个数据开始,向前比较。
他的时间复杂度为:O(N^2)
他的稳定性:稳定的
应用场景:在元素个数较少,接近有序
for(int i=1;i<size;i++){
key=array[i];
int end=i-1;
while(end>=0&&key<array[end]){
array[end+1]=array[end];
end--;
}
array[end+1]=key;
}
最终实现:
void IsertSort(int array[], int size){
//表示当前要插入元素在数组中的下标,i位置的元素一定往i之前插入
for (int i = 1; i < size; i++){
int key = array[i];//我们要开始插入的元素从第i个开始
int end = i - 1;//我们的要插入的数组的end=i-1
while (end>=0&&array[end]>key){
array[end + 1] = array[end];
end--;
}
array[end+1] = key;
}
}
2.2插入排序–希尔排序
现在给出一组数据,他的数据量大,且无序,到那时还是要使用插入排序的思想,这时,我们可以借助希尔排序。
希尔排序法:又称缩小增量法。希尔排序法的基本思想是:先选定一个整数,把待排序文件中所有记录分成个组,所有距离为的记录分在同一组内,并对每一组内的记录进行排序。
 如何进行分组呢?
如何进行分组呢?
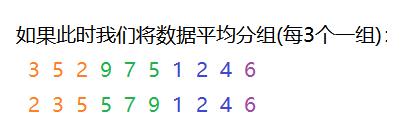
此时我们可以间隔着将其进行分组。假设给一个标记gap=3,一下标每间隔3分成一组,进行排序。
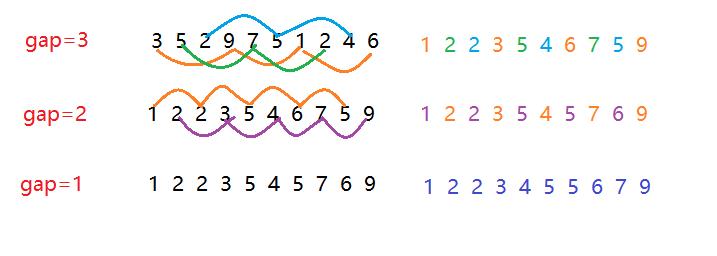
当gap > 1时都是预排序,目的是让数组更接近于有序。当gap == 1时,数组已经接近有序的了。
gap取值:
int gap=size;
gap=gap/3+1;
复杂度:O(N1.3—N2)
稳定性:不稳定
应用场景:数据量大,且无序。
void ShellSort(int array[], int size)
{
int gap = size;
while (gap > 0){
gap=gap/3+1;
for (int i = gap; i < size; i++){
int key = array[i];//我们要开始插入的元素从第i个开始
int end = i - gap;//我们的要插入的数组的end=i-1
while (end >= 0 && array[end]>key){
array[end + gap] = array[end];
end -= gap;
}
array[end + gap] = key;
}
}
}
2.3选择排序–选择排序
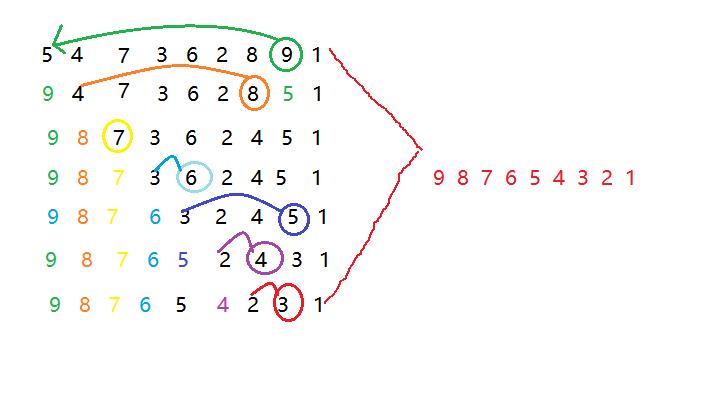
选择排序:每一次从待排序的数据元素中选出最小(或最大)的一个元素,存放在序列的起始位置,直到全部待排序的数据元素排完 。
时间复杂度:O(N^2)
稳定性:不稳定
//降序排序
void SElectSort(int array[], int size){
for (int i = 0; i < size; i++){
int index = i;
int max = array[i];
for (int j = i; j < size; j++){
if (array[j]>max){
max = array[j];
index = j;
}
}
array[index] = array[i];
array[i] = max;
}
}
同时对最大值与最小值进行降序排列
//同时调节最大元素与最小元素
void SelectSorttogether(int array[], int size){
for (int i = 0; i < size; i++){
int max = array[i];
int min = array[size - i-1];
int index_max = i;
int index_min = size - 1 - i;
for (int j = i; j < size - i - 1; j++){
if (array[j]>max){
max = array[j];
index_max = j;
}
if (array[j] < min){
min = array[j];
index_min = j;
}
}
array[index_max] = array[i];
array[i] = max;
array[index_min] = array[size - i - 1];
array[size - i - 1] = min;
}
}
选择排序的缺陷:存在重复比较。–>如何优化?利用堆排序。
2.4选择排序–堆排序
(原理:我的另一篇博客)
void Heapadjustdown(int array[], int size, int parent){
int temp = 0;
int child = parent * 2 + 1;//先标记左孩子,一个堆里面不一定又右孩子
while (child<size){//此时,保证父结点一直存在孩子
if (child + 1 < size&&array[child + 1] > array[child]){//此时先判定有没有右孩子,在看右孩子是否大于左孩子在对
child += 1;//标记孩子结点
}
if (array[parent] < array[child]){
//如果此时父结点小于子结点那么进行交换
temp=array[child] ;
array[child] = array[parent];
array[parent] = temp;
//此时交换结束后,对其父结点和子结点的位置进行调整
parent = child;
child = parent * 2 + 1;
}
else{ break; }
}
}
//堆排序
void Heapsort(int array[], int size){
int temp = 0;
//建堆,升序建设大堆,降序建小堆
//从倒数第一个非叶子结点开始知道根节点的位置向下调整
int root = size/ 2-1;
while (root >= 0)
{
Heapadjustdown(array, size, root);
root--;
}
//进行完向下调整得到大堆后,我们可以开始利用堆删除进行对堆排序
int end = size-1;//删除堆顶元素
while (end>0){
//1.将堆顶元素于堆尾元素进行交换
temp = array[0];
array[0]=array[end];
array[end] = temp;
//2.删除堆尾元素
end--;
//3.对进行删除完后的堆进行重新向下排序
Heapadjustdown(array, end+1, 0);
}
}
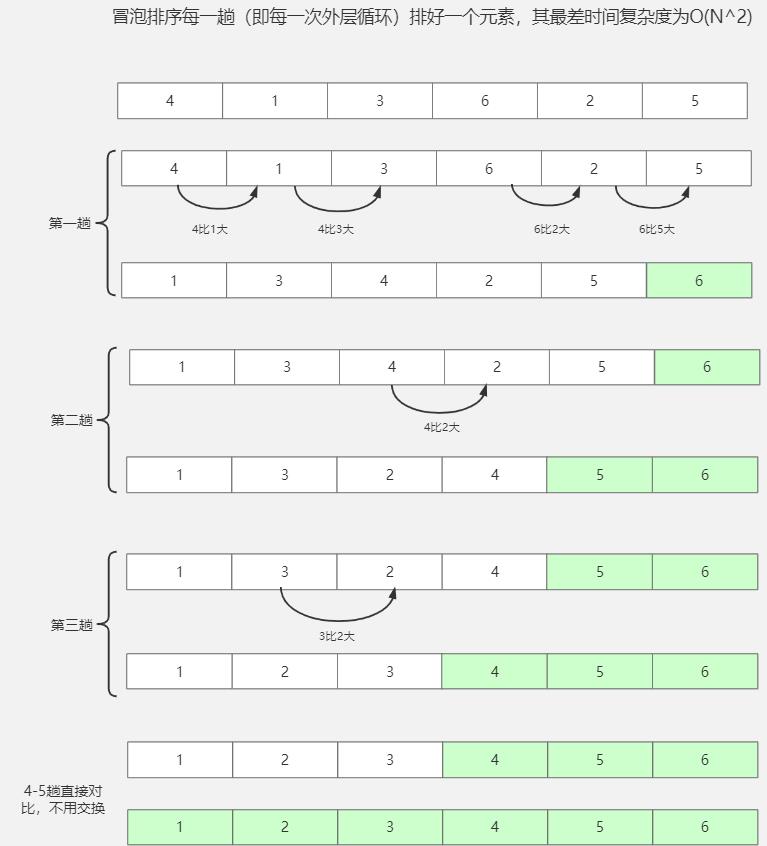
2.5交换排序–冒泡排序
//冒泡排序,顺序排列
void BubbleSort(int array[], int size){
int swap = 0;
for(int i = 0; i < size-1; i++){
for (int j = 0; j < size - i-1; j++){
if (array[j]> array[j + 1]){
swap = array[j];
array[j] = array[j + 1];
array[j + 1] = swap;
}
}
}
}
2.6交换排序–快速排序
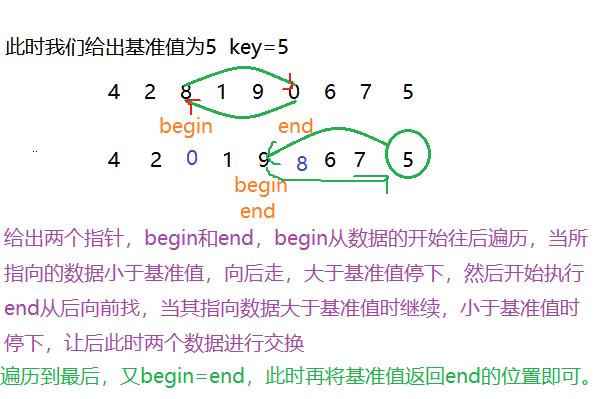
快速排序是Hoare于1962年提出的一种二叉树结构的交换排序方法,其基本思想为:任取待排序元素序列中的某元素作为基准值,按照该排序码将待排序集合分割成两子序列,左子序列中所有元素均小于基准值,右子序列中所有元素均大于基准值,然后最左右子序列重复该过程,直到所有元素都排列在相应位置上为止。
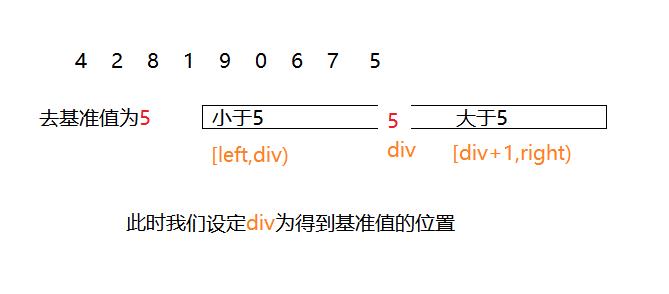
现在我们看如何按照基准值来划分:
但是在基准值上的选择是十分重要的,在基准值选择上我们要尽量避免大多数情况下选择最大值或最小值,下面使取基准值的优化(三数取中法):
int middlenum(int array[], int left, int right){
int middle = (left + right) / 2;
if (array[left] < array[right]){
if (array[middle] < array[left])
return left;
else if (array[middle]>array[right])
return right;
else
return middle;
}
else{
if (array[middle]>array[left])
return left;
else if (array[middle] < array[right])
return right;
else
return middle;
}
}
法一:hoare
int partion1(int array[], int left1, int right1){
int left = left1;
int right = right1;
int temp = 0;
int key = middlenum(array,left,right);
//交换right与key的位置,将基准值再次放到末位置
temp = array[right];
array[right] = array[key];
array[key] = temp;
while (right>left){
if (array[left]<array[right1]){
left++;
}
else{
if (array[right] >= array[right1]){
right--;
}
else{
temp = array[left];
array[left] = array[right];
array[right] = temp;
}
}
}
if (left < right1){
//将基准值于left位置进行交换
temp = array[right1];
array[right1] = array[left];
array[left] = temp;
}
return left;
}
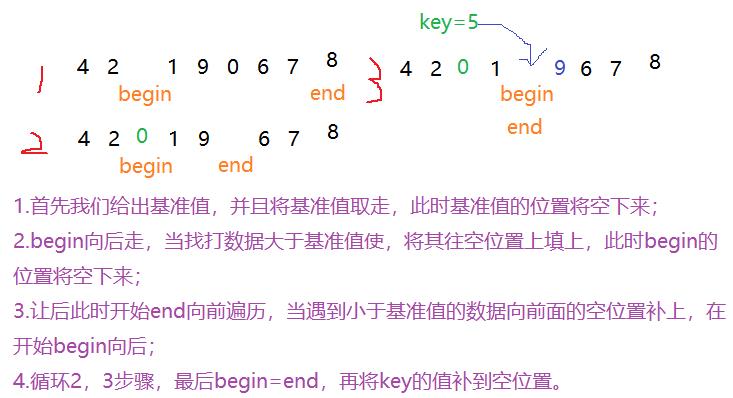
法二:挖坑法
int partion2(int array[] , int left1, int right1){
//挖坑法
int left = left1;
int right = right1;
int temp = 0;
int key = middlenum(array, left, right);
//交换right与key的位置,将基准值再次放到末位置
temp = array[right];
array[right] = array[key];
array[key] = temp;
int keynum = array[right1];//将key值进行保存
while (left < right){
while (left<right&&array[left] < keynum){
left++;
}
//如果大于,则用此时数据进行填坑
array[right] = array[left];
while (left<right&&array[right]>=keynum){
right--;
}
array[left] = array[right];
}
//最后将基准值补到空位置上
array[left] = keynum;
return left;
}
法三:前后指针法
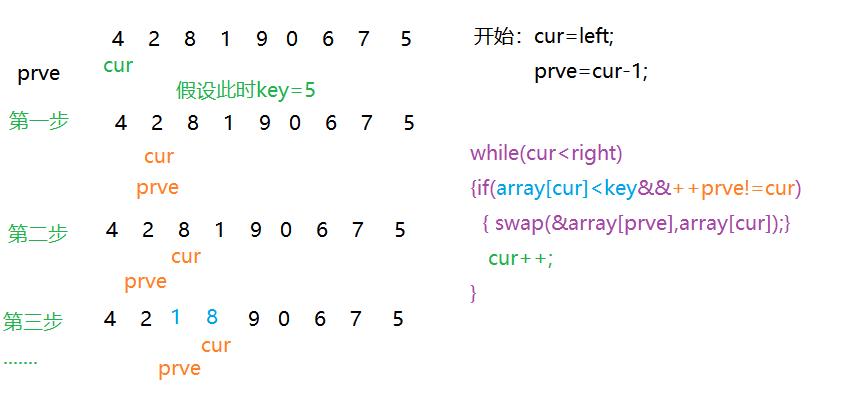
int partion3(int array[], int left, int right){
int cur = left;
int prve = cur - 1;
int key = middlenum(array, left, right);
//交换right与key的位置,将基准值再次放到末位置
int temp = array[right];
array[right] = array[key];
array[key] = temp;
while (cur < right){
if (array[cur] < array[right] && ++prve != cur){
//交换right与key的位置,将基准值再次放到末位置
temp = array[prve];
array[prve] = array[cur];
array[cur] = temp;
}
cur++;
}
if (++prve != right){
temp = array[prve];
array[prve] = array[right];
array[right] = temp;
}
return prve;
}
快速排序的实现:
1.递归法
void quickSort_hoare(int array[],int left,int right){
int div=0;
if (right - left < 1){
return;
}
//结束后,我们将基准值左面的进行排序右面的进行排序
div = partion3(array, left, right);
//key左面的排序
quickSort_hoare(array, left, div);
//key右面的排序
quickSort_hoare(array, div + 1, right);
}
2.循环的方法
因为每次进行递归,相当于通过层层压栈的方式进行保存起来,我们只需要自己定义一个栈的结构,对每次形成的区间进行保存即可。
void QuicksortNor(int array[],int size){
stack s;
stackInit(&s);//对栈进行初始化
int left=0;
int right=size;
int div=0;
stackPush(&s,left);//对左边界进行压栈
stackPush(&s,right);//对右边界进行压栈
while(!StackEmpty(&s)){
right=stackTop(&s);//先取有右边界元素
stackPop(&s);//移除
left=stackTop(&s);
stackPop(&s);
if(right-left>=1){
div=pation1(array,left,right);
//[div+1,rigth],先压右半侧
stackpush(&s,div+1);
stack(&s,right);
//[left,div]
stackpush(&s,left);
stackpush(&s,div);
}else{
break;
}
}
stackDestory(&s);//栈的销毁
}
快排在最好的情况下时间复杂度–O(Nlog2(N)),最坏的情况下–O(N^2)。
空间复杂度最好为–O(log2N),最坏的情况下–O(N)。
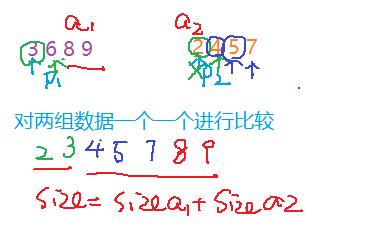
2.7归并排序
数量非常大,不能一次性加载到内存中。
1.在学习归并排序中,此时我们要知道给定两组有序数据,将其合并成一组数据。
void meraedata(int array[],int left,int right,int temp[]){
//现在我们一直一组数据时从[left,mid),另一组数据是从[mid-right)
int i = 0;
int begin1 = left;
int end1 = left + <以上是关于数据结构--排序的主要内容,如果未能解决你的问题,请参考以下文章
ElasticSearch学习问题记录——Invalid shift value in prefixCoded bytes (is encoded value really an INT?)(代码片段