开源10轴IMU PCB,基于MEMS传感器MPU6500-HMC5983-AK8975-BMP280-MS5611设计
Posted Mark_md
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了开源10轴IMU PCB,基于MEMS传感器MPU6500-HMC5983-AK8975-BMP280-MS5611设计相关的知识,希望对你有一定的参考价值。
以MPU6500-HMC5983-AK8975-BMP280-MS5611为传感元件的10轴IMU PCB,集成MEMS加速度计、陀螺仪、地磁、气压计。有三种不同尺寸的PCB组合样式,Altium格式,可直接打样生产。可用于四轴飞行器、平衡车、计步器、惯导学习 等方面。
源于以前玩四轴飞行器,自己做飞控的一部分,现在四轴热度过了,stm32也凉了,真是时过境迁。
多年前的设计,丝印效果可能不是很好看,打样前建议根据个人习惯稍加修改。
Github下载地址:10DOF-IMU-PCB
多多 Star 哦。(๑• ω •๑)
V2
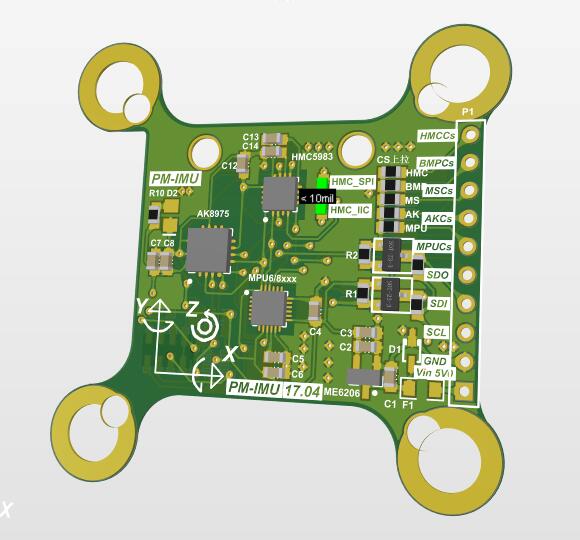
概述:V2版本是三个版本中的集大成者,共集成了全部5个元件的焊盘位。集成过流保护、反接保护、3.3V/5V电平转换。IIC/SPI总线,2.54插针/SH1.0接口引出方式。四周配有9mm减震球安装孔。
- 6DOF传感器:
MPU6500/6881兼容焊盘 - 地磁传感器:
HMC5983-AK8975共两个元件焊盘 - 气压计:
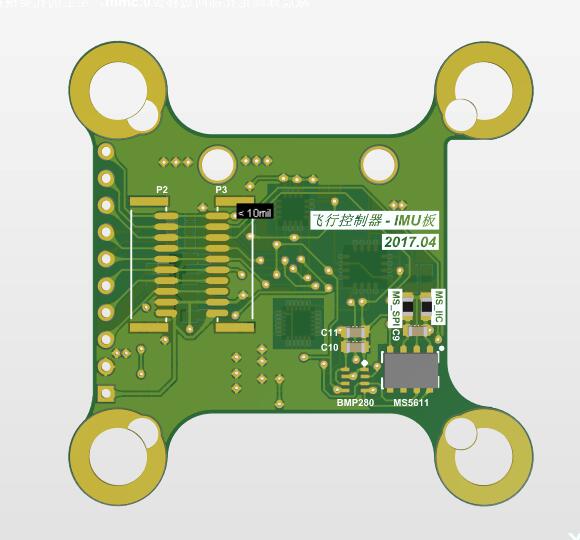
BMP280-MS5611共两个元件的焊盘(背面放置,避光、且方便垫海绵) - 尺寸为44x44mm,实际有效面积很少,其中大部分都被四周的9mm减震球安装孔占用。
- 5V/3.3V供电,LDO使用ME6206。
- 集成过流保护、反接保护、3.3V/5V电平转换。
- 电路经多次打样实测,功能无异常,可放心使用。(建议使用V3版)
V3
概述:V3继承于V2版本的设计,增加了四周的3mm固定孔,修改了AD的板框增加了3D显示的美观度。
- 电路经多次打样实测,功能无异常,可放心使用。(建议使用V3版)
- (对于对PCB体积要求不高的需求,建议使用此版本。集成的元件和功能较多,对调试比较友好。)
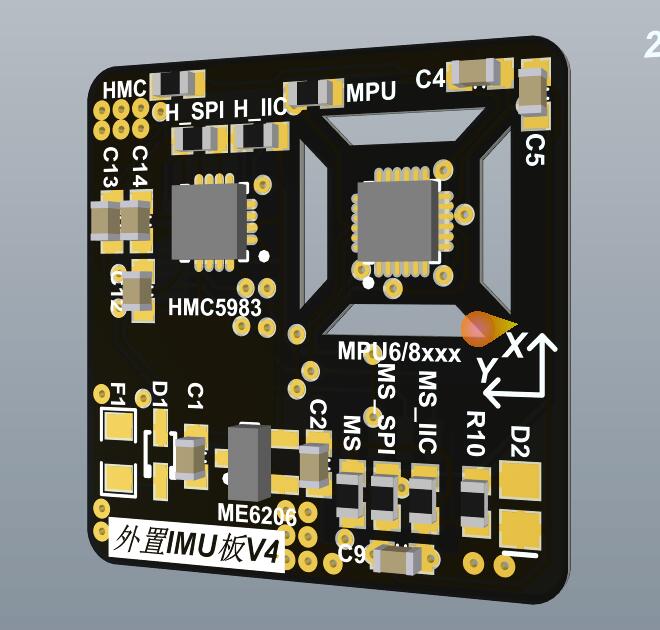
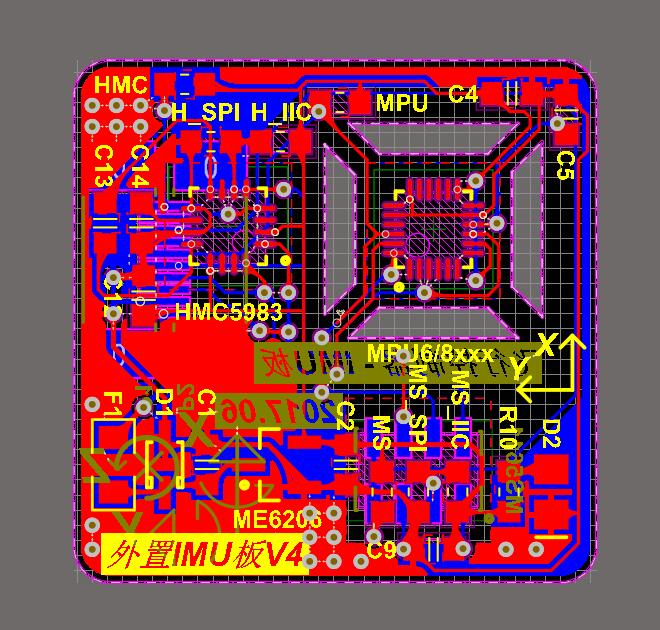
V5
概述:V5是Mini定制版本,尺寸仅有22x22mm。以 MPU6500-HMC5983-MS5611 为传感器,移除了3.3V/5V电平转换电路,使用FPC-10P排线作为通信接口。
- 6DOF传感器:
MPU6500/6881兼容焊盘 - 地磁传感器:
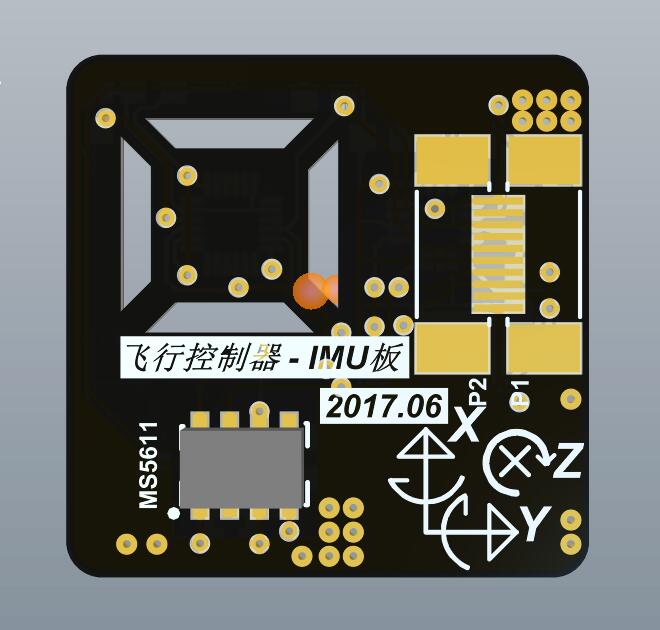
HMC5983单焊盘 - 气压计:
MS5611单焊盘(背面放置,避光、且方便垫海绵) - V5是Mini定制版本,尺寸仅有22x22mm。
- 6FOF传感器采用四周切割悬浮的设计,减少板载元件发热对陀螺仪温漂的影响。
- 5V/3.3V供电,LDO使用ME6206。
- 集成过流保护、反接保护。
- 通信电平仅支持3.3V,无3.3V/5V电平转换。
- 电路经多次打样实测,功能无异常,可放心使用。
- (如对PCB面积不受限的场景应用,建议使用V3版,器件更丰富,功能更多。)
Github下载地址:10DOF-IMU-PCB
多多 Star 哦。(๑• ω •๑)
以上是关于开源10轴IMU PCB,基于MEMS传感器MPU6500-HMC5983-AK8975-BMP280-MS5611设计的主要内容,如果未能解决你的问题,请参考以下文章