路径规划人工势场求解机器人路径动态规划matlab源码
Posted 博主QQ2449341593
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了路径规划人工势场求解机器人路径动态规划matlab源码相关的知识,希望对你有一定的参考价值。
原理
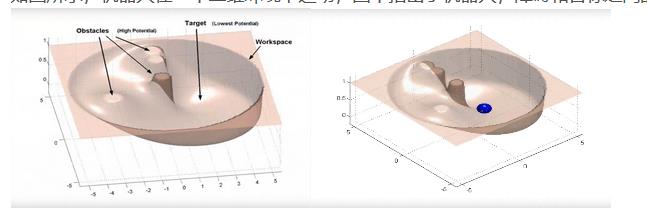
人工建立势场,将障碍物设置成斥力,目标设置成吸引力,进行力的矢量相加,最后算出合力的方向。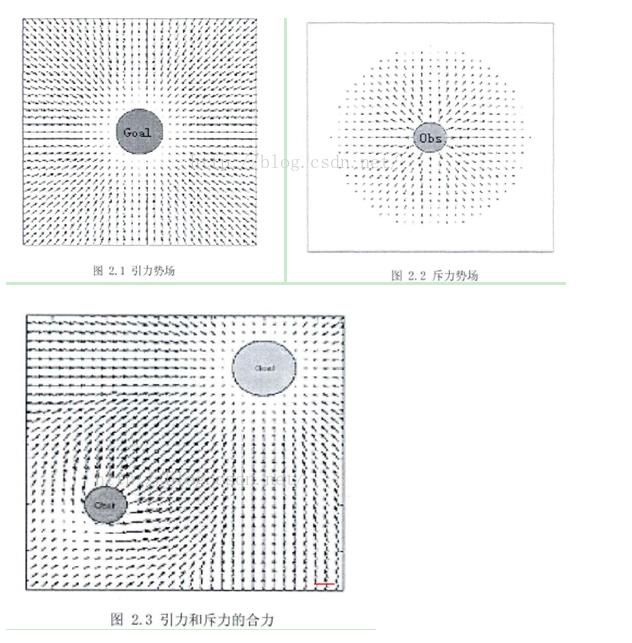
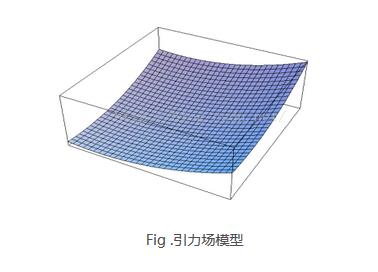
常用的引力函数:
这里的ε是尺度因子.ρ(q,q_goal)表示物体当前状态与目标的距离。引力场有了,那么引力就是引力场对距离的导数(类比物理里面W=FX):

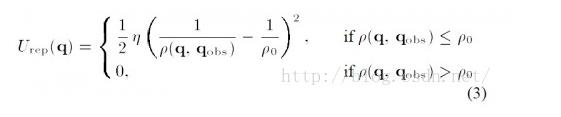
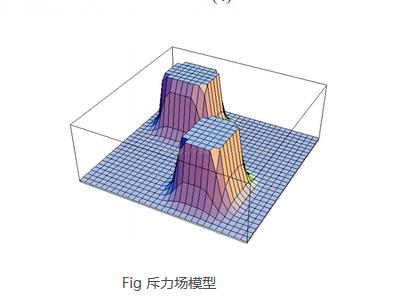
公式(3)是传统的斥力场公式。公式中η是斥力尺度因子,ρ(q,q_obs)代表物体和障碍物之间的距离。ρ_0代表每个障碍物的影响半径。换言之,离开一定的距离,障碍物就对物体没有斥力影响。
斥力就是斥力场的梯度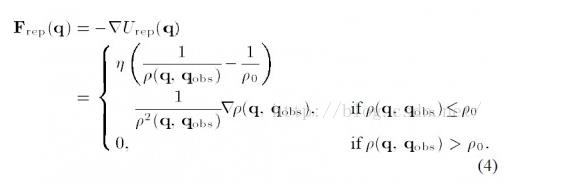
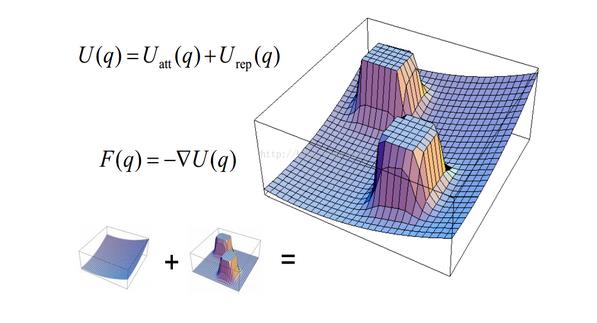
总的场就是斥力场合引力场的叠加,也就是U=U_att+U_rep,总的力也是对对应的分力的叠加,如下图所示:
简单实用,有良好的实时性
结构简单,便于底层的实时控制,在实时壁障和平滑的轨迹控制方面得到广泛的应用
- 当目标点距离较远的话,引力将变得特别大,相对较小的斥力下,物体路径可能会碰到障碍物
- 当目标点附近有障碍物时,斥力将非常大,引力相对较小,物体很难到达目标点
- 在某个点,引力斥力刚好相等,方向相反,物体容易陷入局部最优解或震荡
- 容易陷入局部最优解
- 对于碰到障碍物的问题,可以通过修正引力函数来解决,避免距离过大导致引力过大。
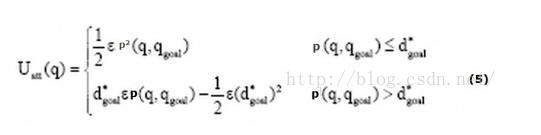 和(1)式相比,(5)式增加了范围限定。d*_goal 给定了一个阈值限定了目标和物体之间的距离。对应的梯度也就是引力相应变成:
和(1)式相比,(5)式增加了范围限定。d*_goal 给定了一个阈值限定了目标和物体之间的距离。对应的梯度也就是引力相应变成:
- 目标点附近有障碍物导致目标不可达的问题,引入一种新的斥力函数

这里在原有斥力场的基础上,加上了目标和物体距离的影响,(n是正数,我看到有篇文献上n=2)。直观上来说,物体靠近目标时,虽然斥力场要增大,但是距离在减少,所以在一定程度上可以起到对斥力场的拖拽作用
相应斥力变成:
所以可以看到这里引力分为两个部分,编程时要格外注意
- 局部最优问题是一个人工势场法的一个大问题,这里可以通过加一个随机扰动,让物体跳出局部最优值。类似于梯度下降法局部最优值的解决方案。
function varargout = AFM(varargin)
% AFM MATLAB code for AFM.fig
% AFM, by itself, creates a new AFM or raises the existing
% singleton*.
%
% H = AFM returns the handle to a new AFM or the handle to
% the existing singleton*.
%
% AFM('CALLBACK',hObject,eventData,handles,...) calls the local
% function named CALLBACK in AFM.M with the given input arguments.
%
% AFM('Property','Value',...) creates a new AFM or raises the
% existing singleton*. Starting from the left, property value pairs are
% applied to the GUI before AFM_OpeningFcn gets called. An
% unrecognized property name or invalid value makes property application
% stop. All inputs are passed to AFM_OpeningFcn via varargin.
%
% *See GUI Options on GUIDE's Tools out. Choose "GUI allows only one
% instance to run (singleton)".
%
% See also: GUIDE, GUIDATA, GUIHANDLES
% Edit the above text to modify the response to help AFM
% Last Modified by GUIDE v2.5 28-Nov-2013 20:49:25
% Begin initialization code - DO NOT EDIT
gui_Singleton = 1;
gui_State = struct('gui_Name', mfilename, ...
'gui_Singleton', gui_Singleton, ...
'gui_OpeningFcn', @AFM_OpeningFcn, ...
'gui_OutputFcn', @AFM_OutputFcn, ...
'gui_LayoutFcn', [] , ...
'gui_Callback', []);
if nargin && ischar(varargin{1})
gui_State.gui_Callback = str2func(varargin{1});
end
if nargout
[varargout{1:nargout}] = gui_mainfcn(gui_State, varargin{:});
else
gui_mainfcn(gui_State, varargin{:});
end
% End initialization code - DO NOT EDIT
% --- Executes just before AFM is made visible.
function AFM_OpeningFcn(hObject, eventdata, handles, varargin)
% This function has no output args, see OutputFcn.
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% varargin command line arguments to AFM (see VARARGIN)
% Choose default command line output for AFM
handles.output = hObject;
% Update handles structure
guidata(hObject, handles);
% UIWAIT makes AFM wait for user response (see UIRESUME)
% uiwait(handles.figure1);
% --- Outputs from this function are returned to the command line.
function varargout = AFM_OutputFcn(hObject, eventdata, handles)
% varargout cell array for returning output args (see VARARGOUT);
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Get default command line output from handles structure
varargout{1} = handles.output;
% --- Executes during object creation, after setting all properties.
function axes4_CreateFcn(hObject, eventdata, handles)
Xo=[0 0];%起点位置
k=1;%计算引力需要的增益系数
m=1;%计算斥力的增益系数
%n=3;%障碍个数
longth=1.2;%步长
J=2000;%循环迭代次数
%如果不能实现预期目标,可能也与初始的增益系数,Po设置的不合适有关。
K=0;%初始化
%[m_Obs,m_ObsR]=Obs_Generate([5 10],[20 80],[10 80],n);
Xj=Xo;%j=1循环初始,将车的起始坐标赋给Xj
axis([-20 120 -20 120]);
axis equal;
hold on;
axis off;
%set(gcf,'color','y')
%fill([-10,110,110,-10],[-10 -10 110 110],'w')
fill([-20,120,120,-20],[-20 -20 120 120],'y')
%title ('人工势场路径规划');
text(-5,-5,' Start','FontSize',12);
fill([95,120,120,95],[-20 -20 10 10],'w')
text(100,5,'Notes:','FontSize',12)
plot(101,-5,'sb','markerfacecolor','b');
text(101,-5,' Robot','FontSize',12);
plot(101,-15,'om','markerfacecolor','m');
text(101,-15,' Ball','FontSize',12);
plot(0,0,'bs')
car=plot(0,0,'sb','markerfacecolor','b');
%car_name=text(0,0,' ','FontSize',12);
object=plot(0,100,'om','markerfacecolor','m');
%object_name=text(0,100,' Ball','FontSize',12);
but=1;
x_obs=1;
y_obs=1;
% hObject handle to axes4 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles empty - handles not created until after all CreateFcns called
% Hint: place code in OpeningFcn to populate axes4
% --- Executes on button press in pushbutton1.
function pushbutton1_Callback(hObject, eventdata, handles)
%main
%%%%%%%%%%%%%%%%%%%%%初始化参数%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%5
Xo=[0 0];%起点位置
k=1;%计算引力需要的增益系数
m=1;%计算斥力的增益系数
%n=3;%障碍个数
longth=1.2;%步长
%循环迭代次数
J=2000;
%如果不能实现预期目标,可能也与初始的增益系数,Po设置的不合适有关。
K=0;%初始化
%[m_Obs,m_ObsR]=Obs_Generate([5 10],[20 80],[10 80],n);
Xj=Xo;%j=1循环初始,将车的起始坐标赋给Xj
axis([-20 120 -20 120]);
axis equal;
hold on;
axis off;
%set(gcf,'color','y')
%fill([-10,110,110,-10],[-10 -10 110 110],'w')
fill([-20,120,120,-20],[-20 -20 120 120],'y')
%title ('人工势场路径规划');
text(-5,-5,' Start','FontSize',12);
fill([95,120,120,95],[-20 -20 10 10],'w')
text(100,5,'Notes:','FontSize',12)
plot(101,-5,'sb','markerfacecolor','b');
text(101,-5,' Robot','FontSize',12);
plot(101,-15,'om','markerfacecolor','m');
text(101,-15,' Ball','FontSize',12);
plot(0,0,'bs')
car=plot(0,0,'sb','markerfacecolor','b');
%car_name=text(0,0,' ','FontSize',12);
object=plot(0,100,'om','markerfacecolor','m');
%object_name=text(0,100,' Ball','FontSize',12);
but=1;
x_obs=1;
y_obs=1;
%pause(1);
%选取障碍
%h=msgbox('单击鼠标左键选择障碍,单击右键完成选择','提示');
%uiwait(h,10);
%if ishandle(h) == 1
% delete(h);
%end
num_obs=1;
while but == 1
[x_obs,y_obs,but] = ginput(1);
if but==1
m_Obs(num_obs,:)=[x_obs y_obs];
m_ObsR(num_obs)=3;
%m_Obs=[0 40;20 70;60 50];
Po=min(m_ObsR)/0.5;
% for i=1:n
Theta=0:pi/20:pi;
xx =m_Obs(num_obs,1)+cos(Theta)*m_ObsR(num_obs);
yy= m_Obs(num_obs,2)+sin(Theta)*m_ObsR(num_obs);
fill(xx,yy,'w')
Theta=pi:pi/20:2*pi;
xx =m_Obs(num_obs,1)+cos(Theta)*m_ObsR(num_obs);
yy= m_Obs(num_obs,2)+sin(Theta)*m_ObsR(num_obs);
fill(xx,yy,'k')
num_obs=num_obs+1;
end
%plot(xx,yy,'LineWidth',2);
% xval=floor(xval);
% yval=floor(yval);
% MAP(xval,yval)=-1;%Put on the closed list as well
% plot(xval+.5,yval+.5,'ro');
end%End of While loop
num_obs=num_obs-1;
%object=plot(0,100,'om');
%car=plot(Xo(1),Xo(2),'sb');
%car_name=text(Xo(1),Xo(2),'Robot','FontSize',12);
%object_name=text(0,100,'Ball','FontSize',12);
%startFlag=pushbutton2_Callback(hObject, eventdata, handles);
uiwait;
%***************初始化结束,开始主体循环******************
for j=1:J%循环开始
% if j<200
x=j/1.5;y=100;
% else
% x=100;y=100;
%end
m_Target=[x,y];
Goal(j,1)=m_Target(1);
Goal(j,2)=m_Target(2);
Current(j,1)=Xj(1);%Goal保存走过的每个点的坐标。刚开始先将起点放进该向量
Current(j,2)=Xj(2);
%调用计算角度模块
[angle_att,angle_rep]=compute_angle(Xj,m_Target,m_Obs,num_obs);
%调用计算引力模块
[Fatt,Uatt(j)]=compute_Attract(Xj,m_Target,k,angle_att);
%调用计算斥力模块
[Frep,Fatt_add,Urep(j)]=compute_repulsion(Xj,m_Target,m_Obs,m_ObsR,...
m,angle_att,angle_rep,num_obs,Po);
%计算合力和方向
[Position_angle(j)]=compute_Ftotal(Fatt,Frep,Fatt_add,num_obs);
%计算车的下一步位置
Xnext(1)=Xj(1)+longth*cos(Position_angle(j));
Xnext(2)=Xj(2)+longth*sin(Position_angle(j));
%保存车的每一个位置在向量中
Xj=Xnext;
% Draw(Xj,m_Obs,m_Target,n);
%判断
% if (Is_Reach(Xj,m_Target,longth)==1)%是应该完全相等的时候算作到达,
%还是只是接近就可以?现在按完全相等的时候编程。
% K=j;%记录迭代到多少次,到达目标。
% break;
%记录此时的j值
% end%如果不符合if的条件,重新返回循环,继续执行。
if x>=100&&Is_Reach(Xj,m_Target,longth)==1
break;
end
X=Current(j,1);
Y=Current(j,2);
A=Goal(j,1);
B=Goal(j,2);
delete(car);
car=plot(X,Y,'sb','markerfacecolor','b');
%v=plot(X,Y,'ro','linewidth',2);
%set(v,'Color',[1,0,0])
%plot(Xo(1),Xo(2),'ms');
delete(object);
object=plot(A,B,'om','markerfacecolor','m');
%delete(car_name);
%car_name=text(X,Y,' Robot','FontSize',12);
%delete(object_name);
%object_name=text(A,B,' Ball','FontSize',12);
pause(0.05)
end%大循环结束
%****************************以下是图形显示部分****************************
%画势场分析图
%Draw(Uatt,Urep);
%画模型效果图
%Draw_Model(Xo,Current,m_Obs,m_ObsR,m_Target,n);
%画总体势场分布图
%Draw_Potential(Xo,m_Obs,m,m_ObsR,Po,m_Target,k,n,[0 100],[0 100]);
clear;
% --- Executes on button press in pushbutton2.
function pushbutton2_Callback(hObject, eventdata, handles)
uiresume;
% hObject handle to pushbutton1 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% --- Executes on button press in pushbutton3.
function pushbutton3_Callback(hObject, eventdata, handles)
uiwait;
% hObject handle to pushbutton3 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% --- Executes on button press in pushbutton4.
function pushbutton4_Callback(hObject, eventdata, handles)
uiresume;
% hObject handle to pushbutton4 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% --- Executes on button press in pushbutton5.
function pushbutton5_Callback(hObject, eventdata, handles)
Xo=[0 0];%起点位置
k=1;%计算引力需要的增益系数
m=1;%计算斥力的增益系数
%n=3;%障碍个数
longth=1.2;%步长
J=2000;%循环迭代次数
%如果不能实现预期目标,可能也与初始的增益系数,Po设置的不合适有关。
K=0;%初始化
%[m_Obs,m_ObsR]=Obs_Generate([5 10],[20 80],[10 80],n);
Xj=Xo;%j=1循环初始,将车的起始坐标赋给Xj
axis([-20 120 -20 120]);
axis equal;
hold on;
axis off;
%set(gcf,'color','y')
%fill([-10,110,110,-10],[-10 -10 110 110],'w')
fill([-20,120,120,-20],[-20 -20 120 120],'y')
%title ('人工势场路径规划');
text(-5,-5,' Start','FontSize',12);
fill([95,120,120,95],[-20 -20 10 10],'w')
text(100,5,'Notes:','FontSize',12)
plot(101,-5,'sb','markerfacecolor','b');
text(101,-5,' Robot','FontSize',12);
plot(101,-15,'om','markerfacecolor','m');
text(101,-15,' Ball','FontSize',12);
plot(0,0,'bs')
car=plot(0,0,'sb','markerfacecolor','b');
%car_name=text(0,0,' ','FontSize',12);
object=plot(0,100,'om','markerfacecolor','m');
%object_name=text(0,100,' Ball','FontSize',12);
but=1;
x_obs=1;
y_obs=1;
% hObject handle to pushbutton5 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% --------------------------------------------------------------------
function Untitled_1_Callback(hObject, eventdata, handles)
% hObject handle to Untitled_1 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% --------------------------------------------------------------------
function help_Callback(hObject, eventdata, handles)
% hObject handle to help (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% --------------------------------------------------------------------
function state_Callback(hObject, eventdata, handles)
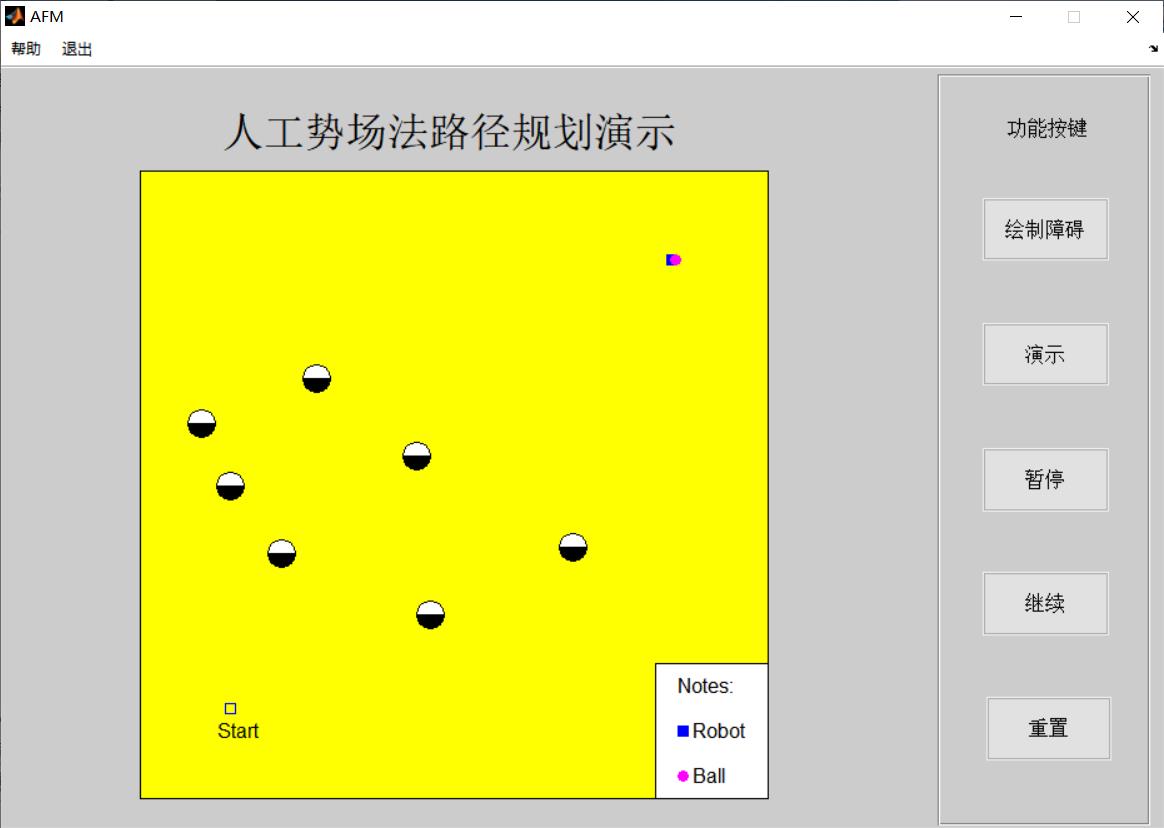
aa=['1.进入仿真界面,单击 <绘制障碍> 功能键在工作窗口绘制障碍' ...
char(10) '2.绘制障碍结束,单击右键完成绘制,十字光标消失表示完成' ...
char(10) '3.点击 <演示> 功能键,将按预订算法自动演示' ...
char(10) '4.点击 <暂停> 功能键,演示过程将暂停运行,点击 <继续> 功能键后,将从暂停位置继续演示' char(10)...
'5.点击 <重置> 功能键,仿真界面将回到初始状态,重新等待操作'];
msgbox(aa,'使用说明');
% hObject handle to state (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% --------------------------------------------------------------------
function about_Callback(hObject, eventdata, handles)
msgbox(' 北航自动化','关于');
% hObject handle to about (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% --------------------------------------------------------------------
function menu_Callback(hObject, eventdata, handles)
% hObject handle to out (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% --------------------------------------------------------------------
function out_Callback(hObject, eventdata, handles)
selection=questdlg(['是否退出演示窗口?'], ...
['退出'],'Yes','No','Yes');%当选择退出按钮时,得出一个问是否确定关闭的框
if strcmp(selection,'No')
return;
else
if strcmp(selection,'Yes')
clc; %当选择关闭时,清空所有matla输入面上的所有错误信息,同时关闭图像窗口
clear all;
delete(gcf);
else
return;
end
end
% hObject handle to out (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
完整代码或者仿真咨询添加QQ1575304183
以上是关于路径规划人工势场求解机器人路径动态规划matlab源码的主要内容,如果未能解决你的问题,请参考以下文章
路径规划基于matlab改进的人工势场算法机器人避障路径规划含Matlab源码 1151期
无人机路径规划基于人工势场实现无人机编队路径规划matlab源码