路径规划基于粒子群算法实现避障规划matlab源码
Posted MatlabQQ1575304183
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了路径规划基于粒子群算法实现避障规划matlab源码相关的知识,希望对你有一定的参考价值。
1.理论基础
粒子群算法(particle swarm optimization,PSO)是计算智能领域中的一种生物启发式方法,属于群体智能优化算法的一种,常见的群体智能优化算法主要有如下几类:
(1)蚁群算法(Ant Colony Optimization,简称ACO)[1992年提出];
(2)粒子群优化算法(Particle Swarm Optimization,简称PSO)[1995年提出](简单易于实现,也是目前应用最为广泛的群体智能优化算法);
(3)菌群优化算法(Bacterial Foraging Optimization,简称BFO)[2002年提出];
(4)蛙跳算法(Shuffled Frog Leading Algorithm,简称SFLA)[2003年提出];
(5)人工蜂群算法(Artificial Bee Colony Algorithm,简称ABC)[2005年提出];
除了上述几种常见的群体智能算法以外,还有一些并不是广泛应用的群体智能算法,比如萤火虫算法、布谷鸟算法、蝙蝠算法以及磷虾群算法等等。
而其中的粒子群优化算法(PSO)源于对鸟类捕食行为的研究,鸟类捕食时,找到食物最简单有限的策略就是搜寻当前距离食物最近的鸟的周围。
举个通俗的例子:
一群鸟在寻找食物,在这个区域内有一个食物,所有的鸟都不知道食物在哪里,但食物发出了香味,鸟通过香味的浓烈能判断出自己的当前位置距离食物有多远,同时鸟群之间是可以交流并告知离食物最近的鸟的位置的。试想一下这个时候会发生什么?
鸟甲:哈哈哈,原来我离食物最近!
鸟乙、丙、丁…:我得赶紧往鸟甲那里过去看看!
同时各自鸟在位置不停变化的时候,离食物的距离也不断的变化,所以一定有过离食物最近的位置,这是他们的一个参考。
鸟某某:我刚才的位置好像离食物很近了,我得往那里再靠近点!
通过这样一个过程,不断的变化,最终鸟群会向食物方向聚集,达到目标。在这个变化的过程中,影响鸟的运动状态变化的有两个因素:
- 离食物最近的鸟的位置
- 自己之前达到过的离食物最近的位置
而鸟的每次的位置变化,除了考虑以上的两个因素还有一个因素就是惯性。而对位置的变化,通过变化量(速度)来表示。
通过以上的例子,我们可以把鸟抽象为没有质量和体积的微粒(点),并延伸到N维空间,粒子I 在N维空间的位置表示为矢量Xi=(x1,x2,…,xN),飞行速度表示为矢量Vi=(v1,v2,…,vN).每个粒子都有一个由目标函数决定的适应值(fitness value),并且知道自己到目前为止发现的最好位置(pbest)和现在的位置Xi.这个可以看作是粒子自己的飞行经验.除此之外,每个粒子还知道到目前为止整个群体中所有粒子发现的最好位置(gbest)(gbest是pbest中的最好值).这个可以看作是粒子同伴的经验.粒子就是通过自己的经验和同伴中最好的经验来决定下一步的运动。归结为下面的两个公式:
![]() (公式-1)
(公式-1)
![]() (公式-2)
(公式-2)
其中, 为惯性权重因子,(什么是权重因子,这个后面会讲到,此处大概知道有这么一个参数即可);d=1,2,…,D;i=1,2,…,n;k为当前迭代次数;Vid为粒子的速度;c1和c2是非负的常数,称为加速因子;r1和r2是分布于[0,1]区间的随机数。为了防止粒子的满目搜索,一般建议限制位置和速度在一定的区间。
为惯性权重因子,(什么是权重因子,这个后面会讲到,此处大概知道有这么一个参数即可);d=1,2,…,D;i=1,2,…,n;k为当前迭代次数;Vid为粒子的速度;c1和c2是非负的常数,称为加速因子;r1和r2是分布于[0,1]区间的随机数。为了防止粒子的满目搜索,一般建议限制位置和速度在一定的区间。
2.粒子群寻优算法的案例与实现
假设有如下非线性函数,需要在一定范围内找出最大值和最大值的位置,本文用Python实现。
(公式-3)
我们先通过python把上面函数使用matplotlib把它画处理,让我们有个直观的感受。
-
# -*- coding: utf-8 -*- -
from mpl_toolkits.mplot3d import Axes3D -
import matplotlib.pyplot as plt -
import numpy as np -
fig = plt.figure() -
ax = Axes3D(fig) -
X = np.arange(-2, 2, 0.05) -
Y = np.arange(-2, 2, 0.05) -
X, Y = np.meshgrid(X, Y) -
Z = np.sin(np.sqrt(X**2+Y**2))/np.sqrt(X**2+Y**2)+np.exp((np.cos(2*np.pi*X)+np.cos(2*np.pi*Y))/2)-2.71289 -
ax.plot_surface(X, Y, Z, rstride=1, cstride=1, cmap='hot') -
plt.show()
此处使用mpl_toolkits.mplot3d画3D图,在代码中,分别使用numpy中的arange创建等差长度为0.05的数据点向量,区间为[-2,2]之间,然后使用meshgrid将向量转换给对应的矩阵,这样的话,后面的函数式中就可以使用np中的三角函数和数学函数了,如果不这样的话,还得一个一个点的根据公式去做循环,拼接Z的向量点。
运行出来的图如下:
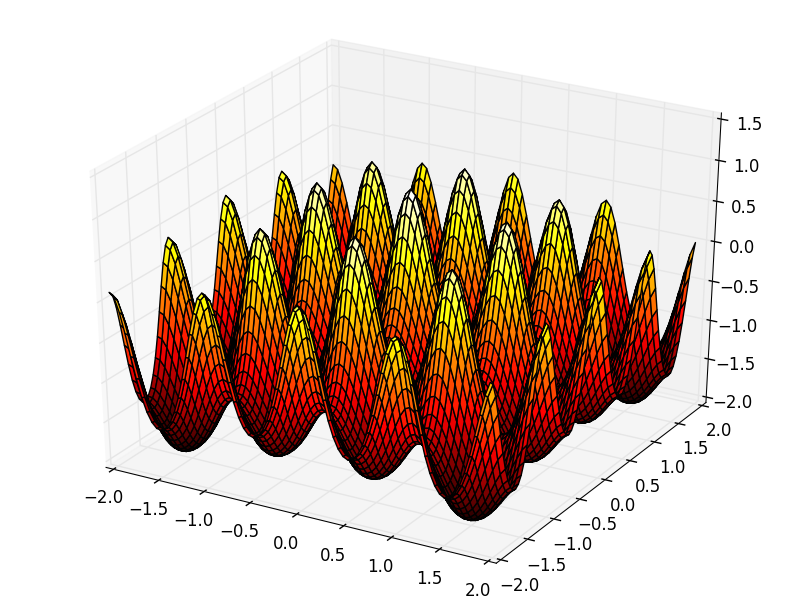
从函数图形中可以看出,这个函数有很多的局部极大值,而真正的极限位置就是在(0,0),极大值为1.005。下面就通过粒子群算法来找寻这个极大值和极大值的位置。根据粒子群算法函数求极值的算法流程如下图所示:

在pycham作为python的IDE中,建立一个名为PSO.py的文件,文件中编写一个名PSO的类。
2.1 参数的设定
设置惯性参数为常数1,也就是公式-1中的为常数1;设置加速度因子为非负的两个常数,公式-1的中的c1和c2;设置迭代次数为300;设置粒子群的规模为20;为了防止粒子的盲目搜索,将位置和速度限制在区间[-2,2]、[-0.5,0.5];
具体代码如下:
-
def __init__(self): -
self.iter=300 #迭代次数 -
self.w=1 #惯性权重 -
self.lr = (0.49445, 1.49445) #粒子群个体和社会的学习因子,即加速常数 -
self.sizepop=20 #种群规模 -
self.rangepop=(-2,2) #粒子的位置的范围限制,x、y方向的限制相同 -
self.rangespeed=(-0.5,0.5) #速度限制 -
self.px=[] #当前全局最优解 -
self.py=[]
2.2 种群初始化
随机初始化粒子位置和粒子的速度,并根据适应度函数计算粒子适应度值,我们的适应度函数就是公式-3这个函数。
首先定义一个适应度函数
-
def func(self,x): -
# x输入粒子位置 -
# y 粒子适应度值 -
if (x[0]==0)&(x[1]==0): -
y = np.exp((np.cos(2*np.pi*x[0])+np.cos(2*np.pi*x[1]))/2)-2.71289 -
else: -
y = np.sin(np.sqrt(x[0]**2+x[1]**2))/np.sqrt(x[0]**2+x[1]**2)+np.exp((np.cos(2*np.pi*x[0])+np.cos(2*np.pi*x[1]))/2)-2.71289 -
return y
然后初始化粒子和计算适应度值
-
def initpopvfit(self,sizepop): -
pop = np.zeros((sizepop,2)) -
v = np.zeros((sizepop,2)) -
fitness = np.zeros(sizepop) -
for i in range(sizepop): -
pop[i] = [(np.random.rand()-0.5)*self.rangepop[0]*2,(np.random.rand()-0.5)*self.rangepop[1]*2] -
v[i] = [(np.random.rand()-0.5)*self.rangepop[0]*2,(np.random.rand()-0.5)*self.rangepop[1]*2] -
fitness[i] = self.func(pop[i]) -
return pop,v,fitness
2.3 寻找初始化后的极值
-
def getinitbest(self,fitness,pop): -
# 群体最优的粒子位置及其适应度值 -
gbestpop,gbestfitness = pop[fitness.argmax()].copy(),fitness.max() -
#个体最优的粒子位置及其适应度值,使用copy()使得对pop的改变不影响pbestpop,pbestfitness类 -
似 -
pbestpop,pbestfitness = pop.copy(),fitness.copy() -
return gbestpop,gbestfitness,pbestpop,pbestfitness
此处需要分别找到群体极值和个体粒子的极值。
2.4 迭代寻优
通过循环迭代,不断的更新粒子的位置和速度,根据新粒子的适应度值更新个体和群体的极值。这部分的代码如下:
-
def run(self): -
""" -
通过循环迭代,不断的更新粒子的位置和速度,根据新粒子的适应度值更新个体和群体的极值 -
:return: -
""" -
pop, v, fitness = self.initpopvfit(self.sizepop) -
gbestpop, gbestfitness, pbestpop, pbestfitness = self.getinitbest(fitness, pop) -
result = np.zeros(self.iter) -
for i in range(self.iter): -
# 速度更新 -
for j in range(self.sizepop): -
v[j] = self.w*v[j] +self.lr[0] * np.random.rand() * (pbestpop[j] - pop[j]) + self.lr[1] * np.random.rand() * ( -
gbestpop - pop[j]) -
v[v < self.rangespeed[0]] = self.rangespeed[0] -
v[v > self.rangespeed[1]] = self.rangespeed[1] -
# 粒子位置更新 -
for j in range(self.sizepop): -
pop[j] +=v[j] -
pop[pop < self.rangepop[0]] = self.rangepop[0] -
pop[pop > self.rangepop[1]] = self.rangepop[1] -
# 适应度更新 -
for j in range(self.sizepop): -
fitness[j] = self.func(pop[j]) -
for j in range(self.sizepop): -
if fitness[j] > pbestfitness[j]: -
pbestfitness[j] = fitness[j] -
pbestpop[j] = pop[j].copy() -
if pbestfitness.max() > gbestfitness: -
gbestfitness = pbestfitness.max() -
gbestpop = pop[pbestfitness.argmax()].copy() -
result[i] = gbestfitness -
self.px.append(gbestpop[0]) -
self.py.append(gbestpop[1]) -
return result,self.px,self.py
2.5 绘图
-
def drawPaht(self,X, Y, Z, px, py, pz): -
""" -
绘图 -
""" -
fig = plt.figure() -
ax = Axes3D(fig) -
plt.title("PSO") -
ax.plot_surface(X, Y, Z, rstride=1, cstride=1, color='b', ) -
ax.set_xlabel('x label', color='r') -
ax.set_ylabel('y label', color='g') -
ax.set_zlabel('z label', color='b') -
ax.plot(px, py, pz, 'r.') # 绘点x -
plt.show()
2.6 结果分析
通过在主函数文件中,实例化PSO类,调用run这个函数,运行上面的代码
-
def f(X,Y): -
return np.sin(np.sqrt(X ** 2 + Y ** 2)) / np.sqrt(X ** 2 + Y ** 2) + np.exp( -
(np.cos(2 * np.pi * X) + np.cos(2 * np.pi * Y)) / 2) - 2.71289 -
pso = PSO() -
result,px,py = pso.run() -
print(max(result),result.argmax()) -
plt.plot(result) -
X = np.arange(-2, 2, 0.05) -
Y = np.arange(-2, 2, 0.05) -
X, Y = np.meshgrid(X, Y) -
Z= f(X,Y) -
pso.drawPaht(X,Y,Z,px,py,f(np.array(px),np.array(py))) -
plt.show()
当迭代了300次之后,画出每代最优个体适应度值的曲线,结果如下:

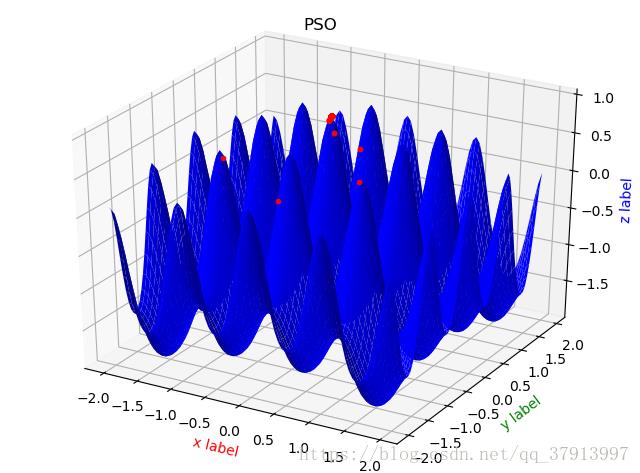
最终得到的最优个体适应度值为:1.00538866933,对应的粒子位置为:[ 2.37513360e-05 3.41265823e-04],通过比较,PSO算法能得到最优值,接近函数实际的最优值1.005。
通过以上,证明PSO算法具有较强的函数极值寻优能力。后面附上全部代码。
clc;
clear;
close all;
%% Problem Definition
model=CreateModel2();
model.n=5; % number of Handle Points
CostFunction=@(x) MyCost(x,model); % Cost Function
nVar=model.n; % Number of Decision Variables
VarSize=[1 nVar]; % Size of Decision Variables Matrix
VarMin.x=model.xmin; % Lower limit of Variables
VarMax.x=model.xmax; % Upper limit of Variables
VarMin.y=model.ymin; % Lower limit of Variables
VarMax.y=model.ymax; % Upper limit of Variables
%% PSO Parameters
MaxIt=50; % Maximum Number of Iterations
nPop=15; % Population Size (Swarm Size)
w=1; % Inertia Weight
wdamp=0.98; % Inertia Weight Damping Ratio
c1=1.5; % Personal Learning Coefficient
c2=1.5; % Global Learning Coefficient
alpha=0.1;
VelMax.x=alpha*(VarMax.x-VarMin.x); % Maximum Velocity
VelMin.x=-VelMax.x; % Minimum Velocity
VelMax.y=alpha*(VarMax.y-VarMin.y); % Maximum Velocity
VelMin.y=-VelMax.y; % Minimum Velocity
%% Initialization
end
%% Results
figure;
plot(BestCost,'LineWidth',2);
xlabel('Iteration');
ylabel('Best Cost');
grid on;


完整代码或者仿真咨询添加QQ1575304183
以上是关于路径规划基于粒子群算法实现避障规划matlab源码的主要内容,如果未能解决你的问题,请参考以下文章