micropython(esp8266)SG90舵机控制
Posted WILLPOWER-
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了micropython(esp8266)SG90舵机控制相关的知识,希望对你有一定的参考价值。
SG90舵机
接线
接线方法
有三根线,分别对应
红色-VCC
棕色-GND
橙色-信号线 这里接在D1也即是GPIO5处
控制方法
控制方法通过pwm控制信号线, 从而控制电机的运动
PWM周期:20ms
| PWM高电平占整个周期的时间 | 舵机旋转角度 |
|---|---|
| 0.5ms | 0° |
| 1ms | 45° |
| 1.5ms | 90° |
| 2ms | 135° |
| 2.5ms | 180° |
micropython程序部分
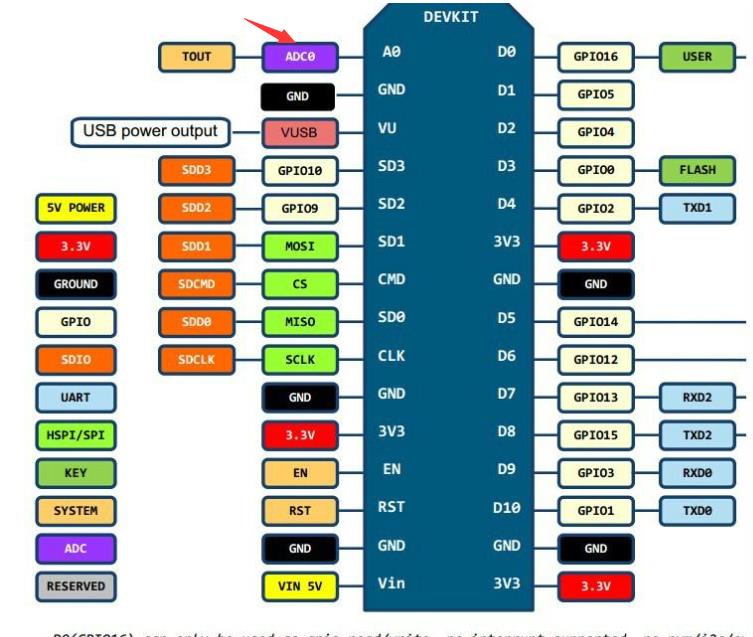
PWM可以在除引脚(16)外的所有引脚上启用。
所有通道都有一个单一的频率,范围在1到1000(以Hz测量)之间。
占空比在O和1023(含1023)之间。
示例
from machine import Pin, PWM
pwm0 = PWM(Pin(0)) # 从一个引脚创建PWM对象
pwm0.freq() # 得到当前的频率
pwm0.freq(1000) # 设置频率
pwm0.duty() # 得到当前占空比
pwm0.duty(200) # 设定了占空比
pwm0.deinit() # 关闭PWM引脚
pwm2 = PWM(Pin(2), freq=500, duty=512) # 一次性创建和配置
实际操作
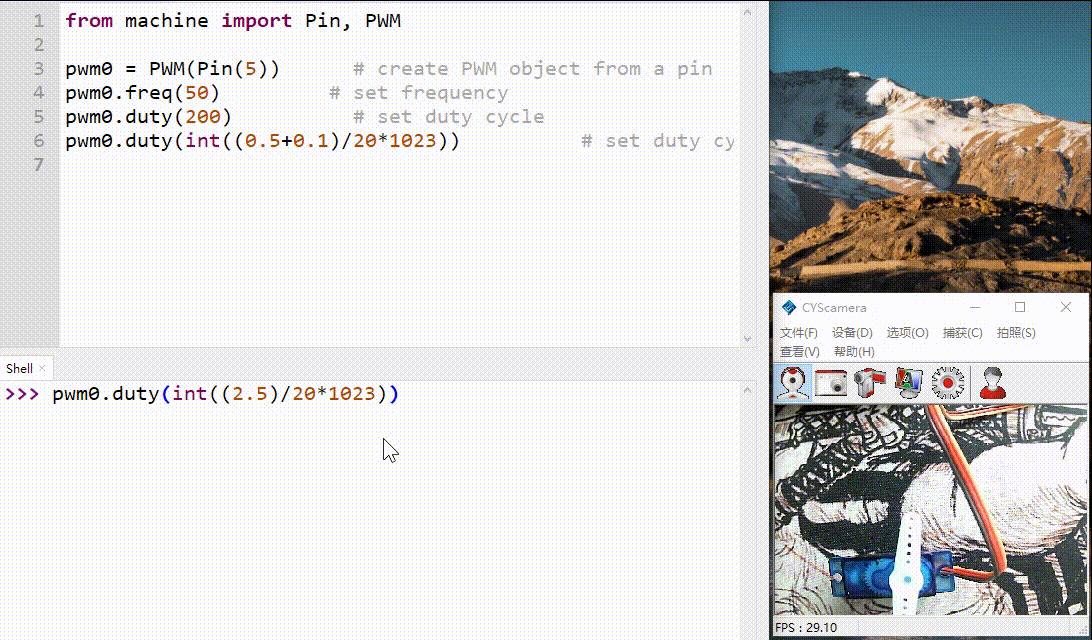
from machine import Pin, PWM
pwm0 = PWM(Pin(5)) # create PWM object from a pin
pwm0.freq(50) # set frequency
pwm0.duty(200) # set duty cycle
pwm0.duty(int((0.5+0.1)/20*1023)) # set duty cycle
以上是关于micropython(esp8266)SG90舵机控制的主要内容,如果未能解决你的问题,请参考以下文章