路径规划基于蚁群算法的三维路径动态仿真
Posted 博主QQ2449341593
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了路径规划基于蚁群算法的三维路径动态仿真相关的知识,希望对你有一定的参考价值。
一、简介
1 蚁群算法的提出
蚁群算法(ant colony optimization, ACO),又称蚂蚁算法,是一种用来寻找优化路径的机率型算法。它由Marco Dorigo于1992年在他的博士论文中提出,其灵感来源于蚂蚁在寻找食物过程中发现路径的行为。遗传算法在模式识别、神经网络、机器学习、工业优化控制、自适应控制、生物科学、社会科学等方面都得到应用。
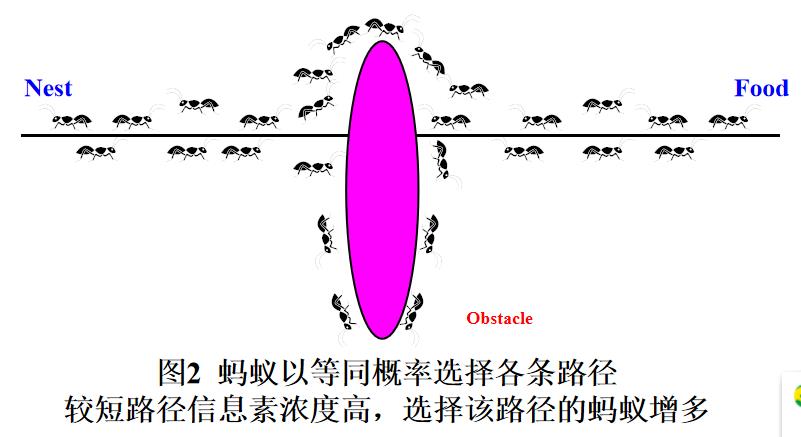
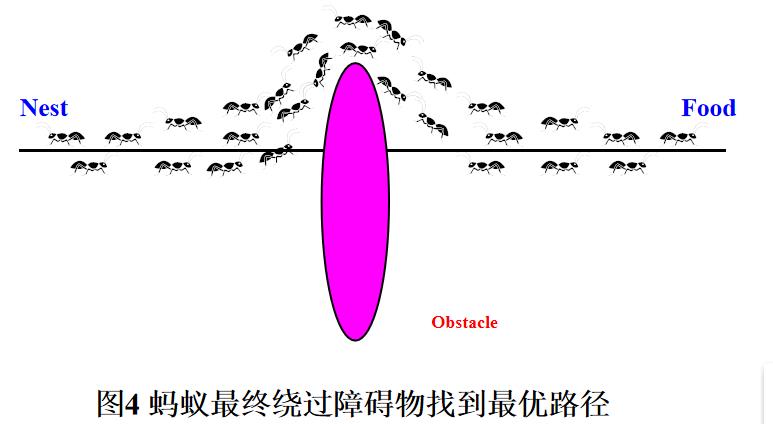
2 算法的基本原理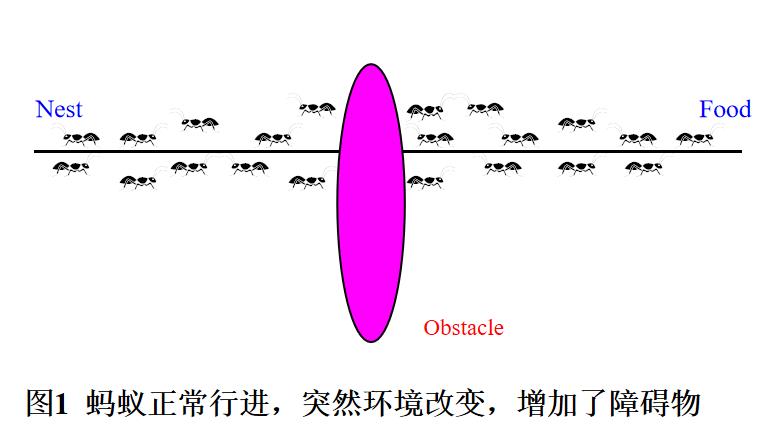
二、源代码
function [sys,x0,str,ts] = quadrotor_plot(t,x,u,flag,s,plot,enable,vehicle)
ts = [-1 0];
if ~isfield(vehicle, 'nrotors')
vehicle.nrotors = 4; % sensible default for quadrotor function
end
switch flag,
case 0
[sys,x0,str,ts] = mdlInitializeSizes(ts,plot,enable); % Initialization
case 3
sys = mdlOutputs(t,u,s,plot,enable, vehicle); % Calculate outputs
case {1,2, 4, 9} % Unused flags
sys = [];
otherwise
error(['unhandled flag = ',num2str(flag)]); % Error handling
end
% Initialize
function [sys,x0,str,ts] = mdlInitializeSizes(ts,plot,enable)
% Call simsizes for a sizes structure, fill it in, and convert it
% to a sizes array.
sizes = simsizes;
sizes.NumContStates = 0;
sizes.NumDiscStates = 0;
sizes.NumOutputs = 0;
sizes.NumInputs = 6;
sizes.DirFeedthrough = 1;
sizes.NumSampleTimes = 1;
sys = simsizes(sizes);
x0 = [];
str = []; % Set str to an empty matrix.
ts = [0.05 0];
if enable == 1
figure(plot);
clf;
%colordef(1,'none');
end
% End of mdlInitializeSizes.
function sys = mdlOutputs(t,u,s, plot, enable, quad)
global a1s b1s
% not quite sure what this is about -- PIC
if numel(a1s) == [0];
a1s = zeros(1, quad.nrotors);
b1s = zeros(1, quad.nrotors);
end
% vehicle dimensons
d = quad.d; %Hub displacement from COG
r = quad.r; %Rotor radius
for i = 1:quad.nrotors
theta = (i-1)/quad.nrotors*2*pi;
% Di Rotor hub displacements (1x3)
D(:,i) = [ d*cos(theta); d*sin(theta); 0];
scal = s(1)/4;
%Attitude center displacements
C(:,i) = [ scal*cos(theta); scal*sin(theta); 0];
end三、运行结果
完整代码添加QQ1575304183
以上是关于路径规划基于蚁群算法的三维路径动态仿真的主要内容,如果未能解决你的问题,请参考以下文章