linux系统下超声波测距(树莓派)
Posted 是光哥呀
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了linux系统下超声波测距(树莓派)相关的知识,希望对你有一定的参考价值。
文章目录
一、HC-SR04超声波
产品应用领域:
1、机器人避障
2、物体测距
3、液位检测
4、公共安防
5、停车场检测
超声波传感器模块上面通常有两个超声波元器件,一个用于发射,一个用于接收。电路板上有4个引脚: VCC (正极)、Trig (触发)、Echo (回应)、GND (接地)。
主要参数:
●工作电压与电流: 5V、15mA。
●感测距离: 2~400cm
●感测角度:不大于15°。
●被测物的面积不要小于50cm2并且尽量平整。
●具备温度补偿电路。
在超声波模块的触发脚位输入10微妙以上的高电位,模块即可自动发送 8 个 40khz 的方波,发射超声波之后,与接收到传回的超声波之前,“响应” 脚位呈现高电位。因此,程序可从“响应”脚位的高电位脉冲持续时间,换算出被测物的距离。
超声波时序图:
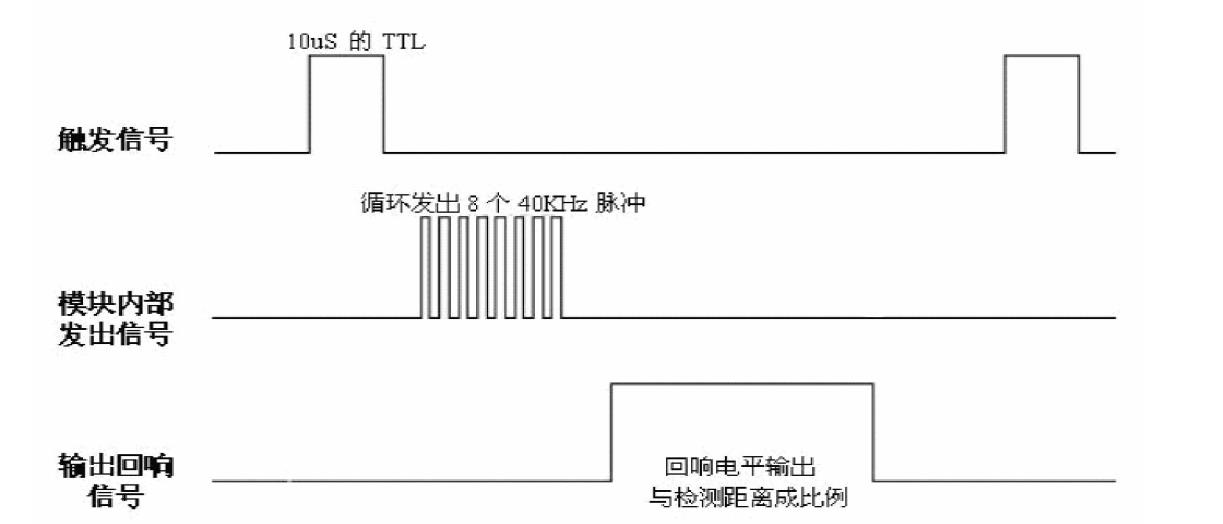
测试距离=(高电平时间*声速(340M/S))/2;
二、相关函数
1、timeval结构体
struct timeval
{
__time_t tv_sec; /* Seconds. */
__suseconds_t tv_usec; /* Microseconds. */
};
tv_sec为创建struct timeval时的秒数,tv_usec为微秒数
2、gettimeofday()函数
gettimeofday()函数用来来获得当前精确时间,通过两次获取时间算出时间差,从而得到超声波在空气跑的时间通过公式转换成距离。
#include <sys/time.h> //头文件
int gettimeofday(struct timeval*tv, struct timezone *tz);
目前的时间用tv 结构体返回
当地时区的信息则放到tz所指的结构中
在gettimeofday()函数中tv或者tz都可以为空。如果为空则就不返回其对应的结构体。在使用gettimeofday()函数时,第二个参数一般都为空,因为我们一般都只是为了获得当前时间,而不用获得timezone的数值
3、硬件初始化函数:
wiringPiSetup(void);//初始化硬件
返回值:-1表示初始化失败
4、通用GPIO控制函数:
pinMode (int pin,int mode); //配置管脚的IO模式
pin:配置的引脚
mode:引脚的IO模式,可取INPUT、OUTPUT、PWM_OUTPUT,GPIO_CLOCK
5、设置引脚电平函数
digitalWrite(pin,value);
输出模式时,该函数作用是设置引脚的输出的电平(高电平或低电平)
输入模式时,该函数作用是获取引脚的输入的电平(高电平或低电平)
三、程序实现:
#include <wiringPi.h>
#include <sys/time.h>
#include <stdio.h>
#define Trig 4 //宏定义引脚
#define Echo 5
float disMeasure(void)
{
struct timeval tv1; //timeval是time.h中的定义结构体,包含两个成员秒,微秒
struct timeval tv2;
long start, stop;
float distance;
digitalWrite(Trig, LOW);
delayMicroseconds(2); //初始化电平
digitalWrite(Trig, HIGH); //发出脉冲
delayMicroseconds(10);
digitalWrite(Trig, LOW);
while(!(digitalRead(Echo) == 1));
gettimeofday(&tv1, NULL); //获取当前时间 开始接收到返回信号的时间
while(!(digitalRead(Echo) == 0));
gettimeofday(&tv2, NULL); //获取当前时间 最后接收到返回信号的时间
start = tv1.tv_sec * 1000000 + tv1.tv_usec; //微秒级的时间
stop = tv2.tv_sec * 1000000 + tv2.tv_usec;
distance = (float)(stop - start) / 1000000 * 34000 / 2; //用该公式求出距离
return distance;
}
int main(void)
{
float distance;//距离变量
if(wiringPiSetup() == -1){ //如果初始化失败,就输出错误信息 程序初始化时务必进行
printf("硬件初始化!\\n");
return 1;
}
pinMode(Echo, INPUT); //设置Echo管脚为输入模式
pinMode(Trig, OUTPUT); //设置Trig管脚为输出模式
while(1){
distance = disMeasure();
printf("distance = %0.2f cm\\n",distance);
delay(1000);
}
return 0;
}
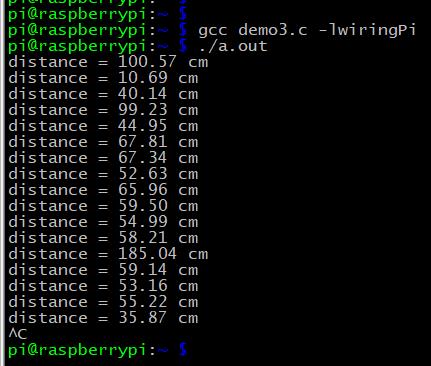
编译时需要加上-l连接wiringPi库
运行效果:
不断反馈测出的距离
以上是关于linux系统下超声波测距(树莓派)的主要内容,如果未能解决你的问题,请参考以下文章