线性探测-闭散列
Posted 小羊教你来编程
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了线性探测-闭散列相关的知识,希望对你有一定的参考价值。

目录:
一.线性探测的概念
我们在这里讲到的线性探测是解决哈希冲突中闭散列的一种方式
闭散列:也叫开放定址法,当发生哈希冲突时,如果哈希表未被装满,说明在哈希表中必然还有空位置,那么可以把key存放到冲突位置中的“下一个” 空位置中去。
~
线性探测:从发生冲突的位置开始,依次向后探测,直到寻找到下一个空位置为止。
二.线性探测原理
闭散列解决哈希冲突的方法就是将元素后移,存放到为空的位置去.
三.功能性接口
1.构造
enum STATE{ //创建一个枚举
EXIST, //存在状态
DELETE, //假删除状态
EMPTY //空状态
};
template<class K, class V>
struct HashNode{ //创建哈希结构体保存对应的KV键值对,并且将这个表的初始状态变为空
pair<K, V> _kv;
STATE _state = EMPTY;
};
//顺序表实现hash
template<class K, class V>
class HashTable{ //hash创建
public:
typedef HashNode<K, V> Node; //定义别名
HashTable(size_t n = 10) //构造函数构造缺省值为10
:_hTable(n)
, _size(0) //存在元素改为0
{}
2.insert
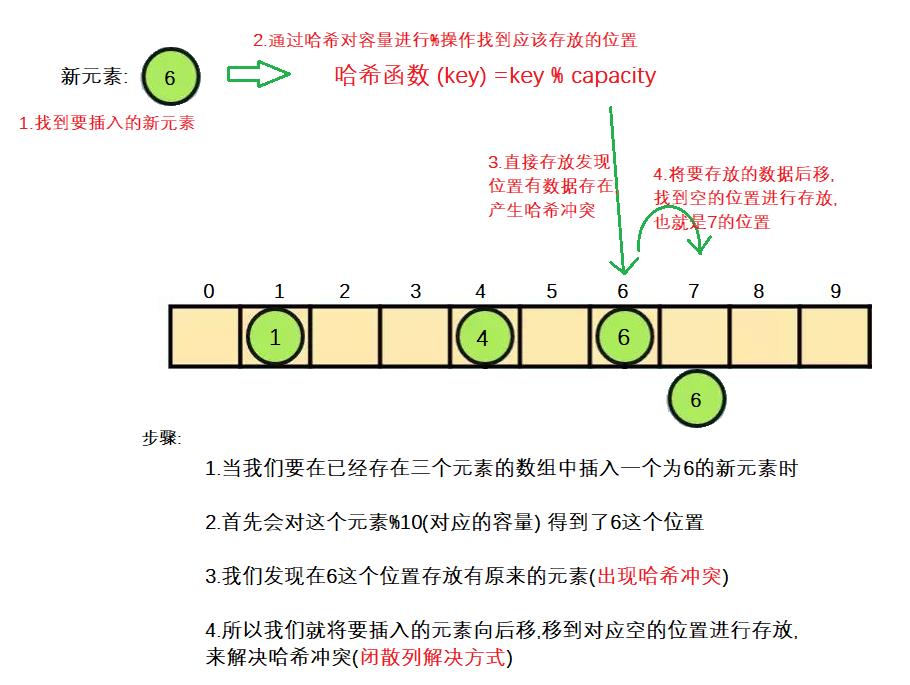
步骤:
1.计算插入元素的哈希位置
2.判断对应的位置是否有元素存在
3.有元素则向后遍历找空存放
4.无元素则直接存放
bool insert(const pair<K, V>& kv){
//0.判断容量是否够用
checkCapacity(); //调用函数
//1.计算哈希位置
int idx = kv.first%_hTable.size();
//2.判断key是否存在
while (_hTable[idx]._state != EMPTY){
//如果当前位置数据有效,且key相同
if (_hTable[idx]._state == EXIST
&&kv.first == _hTable[idx]._kv.first)
{
return false;
}
//继续搜索
++idx;
if (idx == _hTable.size())
idx = 0;
}
//插入
_hTable[idx]._kv = kv;
_hTable[idx]._state = EXIST;
++_size;
return true;
}
3.Capacity
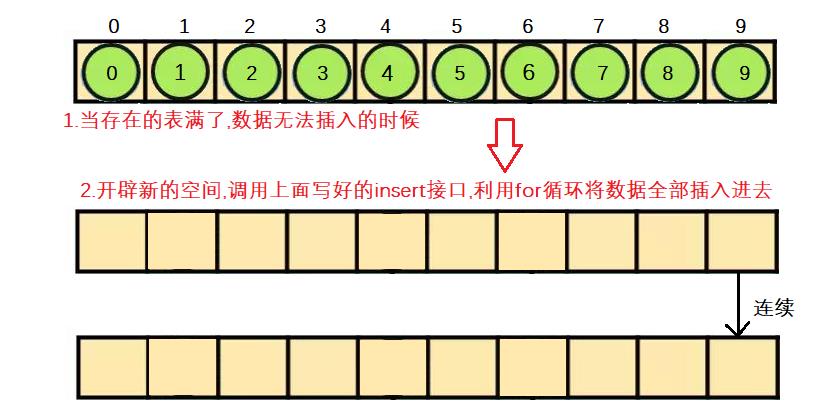
void checkCapacity(){
//负载因子: < 1
//存在的元素/容量 0.7
if (_hTable.size() == 0 || _size * 10 / _hTable.size() >= 7){//当内部的元素存储超过7成的时候就开辟新的表
//开新表
int newC = _hTable.size() == 0 ? 10 : 2 * _hTable.size(); //创建出对应的二倍的空间
HashTable<K, V> newHt(newC);
for (int i = 0; i < _hTable.size(); ++i){ //在for循环内部
//插入状态为exist的数据
if (_hTable[i]._state == EXIST) //将内部存在的元素
{
newHt.insert(_hTable[i]._kv); //依次在新表里面进行插入
}
}
Swap(newHt); //交换新表和旧表
}
}
4.Swap
void Swap(HashTable<K, V>& Ht){ //这里的交换就是让新的表指向对应的位置,容量进行交换
swap(_hTable, Ht._hTable);
swap(_size, Ht._size);
}
5.find
步骤:
1.按照查找位置计算所在的位置
2.如果对应的kv键值对是完全对应的,则直接输出
3.如果没有找到,则继续向后进行遍历
Node* find(const K& key){
//计算对应的位置
int idx = key%_hTable.size(); //先找出所在元素在哈希表中的位置
while (_hTable[idx]._state != EMPTY){ //判断对应的位置是否有元素的存在
if (_hTable[idx]._state == EXIST
&& key == _hTable[idx]._kv.first) //如果元素存在且对应的键值相互对应
{
return &_hTable[idx]; //则找到,直接输出
}
++idx; //没找到则向后遍历
if (idx == _hTable.size())
//如果遍历到最后一个位置没有找到,则变为0从第一个重新开始查找
{
idx = 0;
}
}
return nullptr; //实在没有找到则直接返回空
}
6.erase
步骤:
1.找到对应的元素进行删除
2.注意这里的删除是假删除,元素还存在,只不过将其置为DELETE状态
3.这里的假删除是为了在插入的时候可以正常的插入.
bool erase(const K& key){
Node* node = find(key);
if (node){
//假删除
--_size;
node->_state = DELETE;
return true;
}
return false;
}
private:
vector<Node> _hTable;
size_t _size; //有效元素的个数
};
这就是对于线性探测的实现,主要对于它产生哈希冲突的时候是如何解决的理解.
以上是关于线性探测-闭散列的主要内容,如果未能解决你的问题,请参考以下文章