步进电机驱动在3D打印应用的学习笔记
Posted Engineer-Bruce_Yang
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了步进电机驱动在3D打印应用的学习笔记相关的知识,希望对你有一定的参考价值。
点击上方「嵌入式云IOT技术圈」,选择「置顶公众号」第一时间查看嵌入式笔记!
本文参考以下网友的文章,然后自行补充了一些内容,算是自己学习过程的积累。
http://www.log4cpp.com/diy/3dprinter/46.html
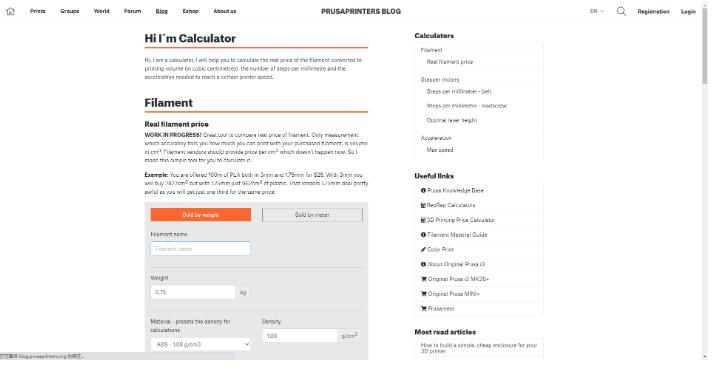
1、3D打印机计算步进电机脉冲的网址:
https://blog.prusaprinters.org/calculator_3416/
2、3D打印机计算步进电机脉冲几种类型
2.1、同步带驱动
2.1.1、步距角

常见:0.9°、1.8°、7.5°
对应步进电机旋转一周的脉冲个数计算公式:
脉冲个数 = 360° / 步距角
如果不考虑其它(驱动板细分、同步轮齿数及同步带类型)的因素,则对应的常见计算表格如下:
| 常见步距角 | 对应的脉冲个数计算 |
|---|---|
| 0.9° | 360°/0.9° = 400 |
| 1.8° | 360°/1.8° =200 |
| 7.5° | 360°/7.5° =48 |
可左右滑动查看
2.1.2、驱动板细分
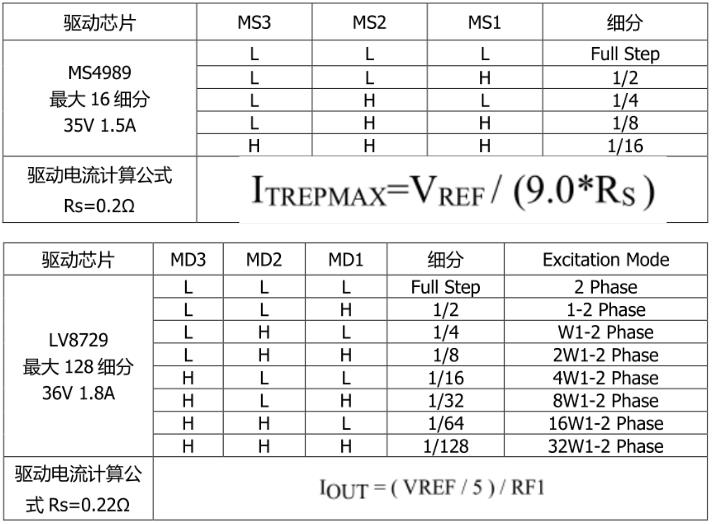
常见驱动板细分:2、4、16、32、64、128、256
对应的,如果是2细分,则原来一个脉冲可以控制转动一个步距角,现在要乘上相应的倍数,如果是4细分,则需要乘以4,以此类推,所以我们又可以得到以下计算公式:
脉冲个数 = 360° / 步距角 * 细分数
如果不考虑其它(同步轮齿数及同步带类型)的因素,以步距角0.9°为例,对应不同电机驱动板细分的计算方法:
| 步距角 | 细分数 | 对应脉冲个数 |
|---|---|---|
| 0.9° | 2 | 360°/0.9° x 2 = 400 x 2 = 800 |
| 0.9° | 4 | 360°/0.9° x 4 = 400 x 4 = 1600 |
| 0.9° | 16 | 360°/0.9° x 16 = 400 x 16 = 6400 |
可左右滑动查看
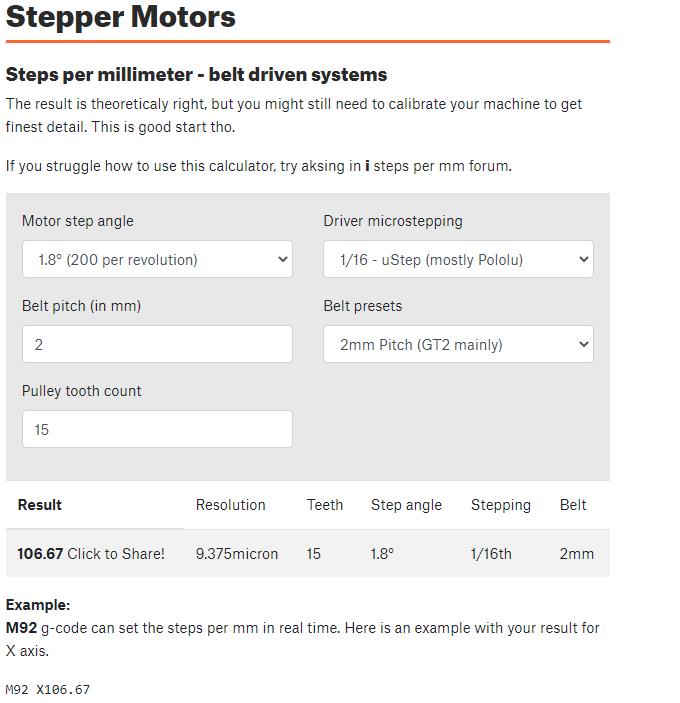
2.1.3、同步齿轮数和同步带类型
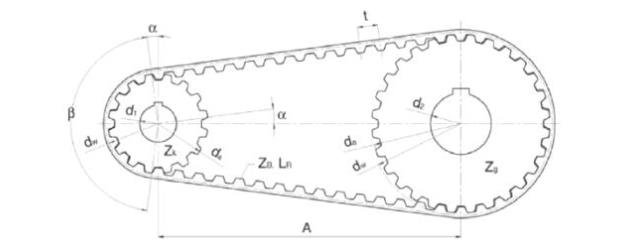

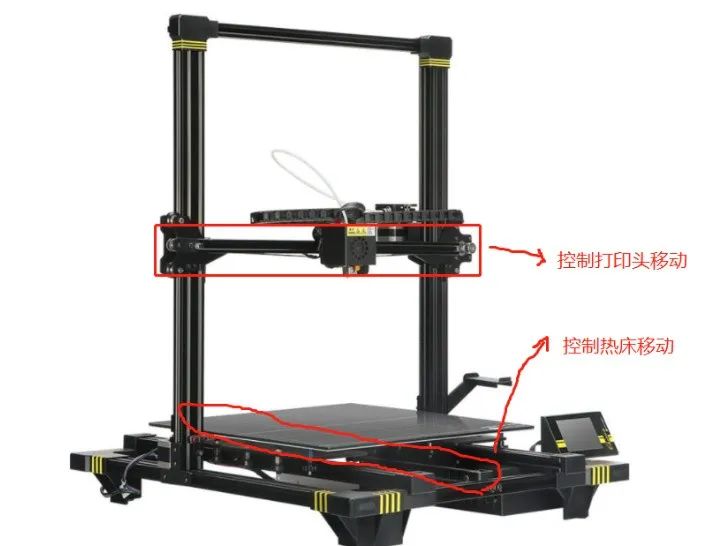
齿轮数可以看规格书或者自己数,还有一个要点是支持同步带的型号,比如GT2 ,代表同步轮两个齿轮的节距为2mm ,在3D打印技术中,需要进行移动的时候,比如控制打印头和热床的移动就会用到同步带和同步齿轮,那么同步带带动打印头或者热床前进nmm所需要的脉冲计算方法如下:
步进电机驱动n细分转动一圈所需的脉冲个数 = 360° / 步距角 * 细分数
同步带转动一圈的距离 = 同步轮齿数 * 齿轮间节距
同步轮需要的脉冲数 = 步进电机驱动n细分转动一圈所需的脉冲个数 / (同步带转动一圈的距离) * s位移(mm)
以步距角为1.8°、细分数为16、同步轮齿数15个、齿轮间节距2mm,根据同步轮脉冲数计算方法如下:
同步轮需要的脉冲数走1mm需要的脉冲数 = (360° / 1.8° * 16 ) / (15 * 2) * 1 = 106.67
2.2、丝杆驱动

丝杆驱动是3D打印中相当关键的一部分:
优点:精度高、传动效率高
缺点:速度慢
在3D打印机中,丝杆驱动最典型的应用就是Z轴的抬升,如下图所示:
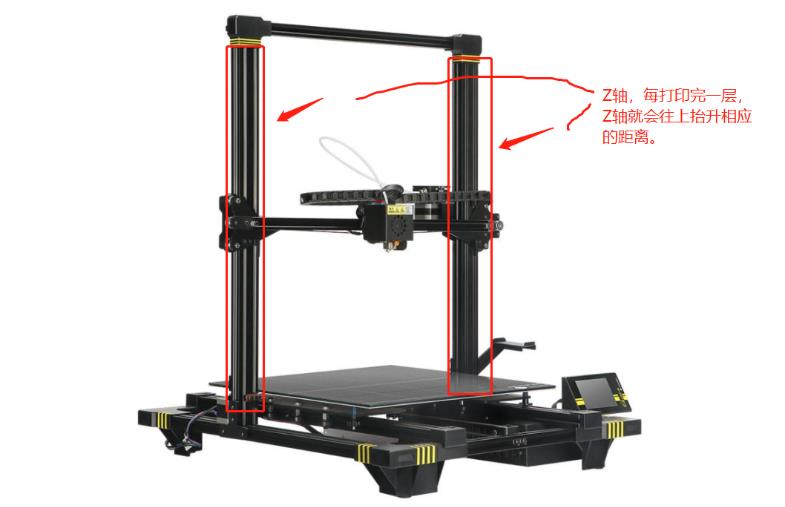
关于丝杆驱动,我们做嵌入式软件开发的人员需要了解接下来的技术参数,这样才能帮助我们更好的去写代码实现相应的功能。
2.2.1、技术参数
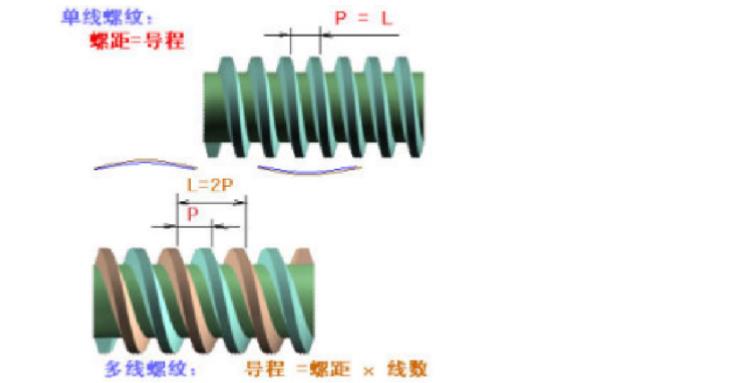
丝杆螺距P
螺距就是相邻两个螺线的距离。
导程L
导程就是丝杆旋转360°,丝杆上的T型螺母移动的距离。
头数n
头线指的是丝杆上螺线的数量。(下图中用不同的颜色表示出不同的螺线)
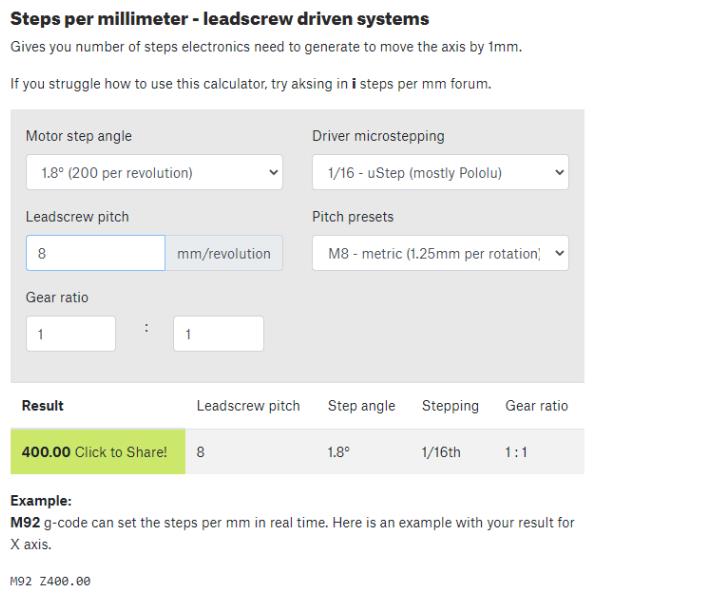
前面我们已经知道了,假设用16驱动细分的步进电机对步距角为1.8°的步进电机进行控制,我们可以得到步进电机旋转一周的脉冲数为:
步进电机驱动n细分转动一圈所需的脉冲个数 = 360° / 步距角 * 细分数 = 360° / 1.8 * 16 = 3200
那么当步进电机以一个4头螺距2mm的丝杆为轴(导程 = 螺距 * 头数 = 2 * 4 = 8mm),因此在对于3D打印机来说,Z轴的上升和下降,计算方法如下:
丝杆移动1mm 所需的脉冲个数= 步进电机驱动细分脉冲个数 / 导程 = 3200 / 8 = 400
2.3、齿轮驱动
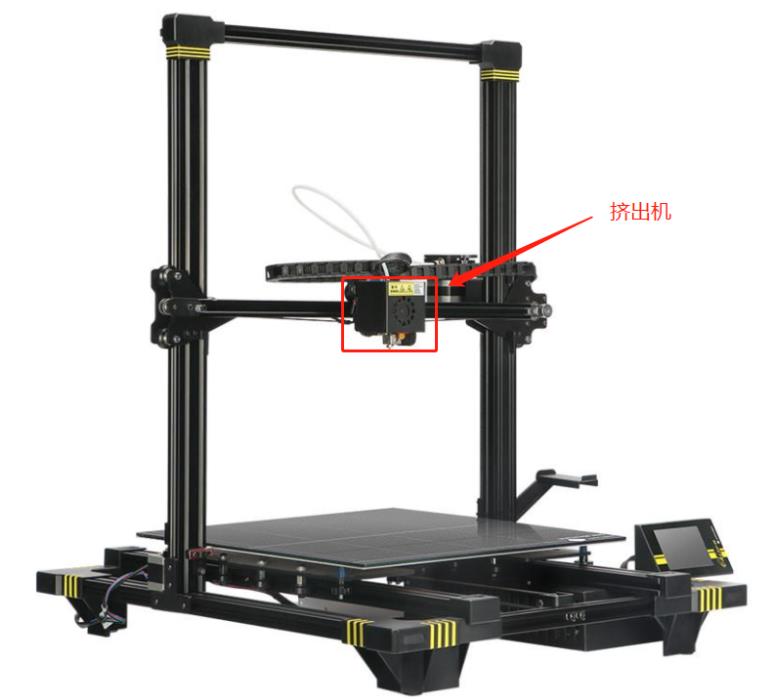

齿轮驱动在3D打印机中最典型的应用就是送料,也就是将耗材从挤出机里挤出来,将耗材附着在热床的表面,完成每一层的打印。
齿轮上的一个点旋转一周产生的距离就是耗材移动的长度,即是齿轮的周长。
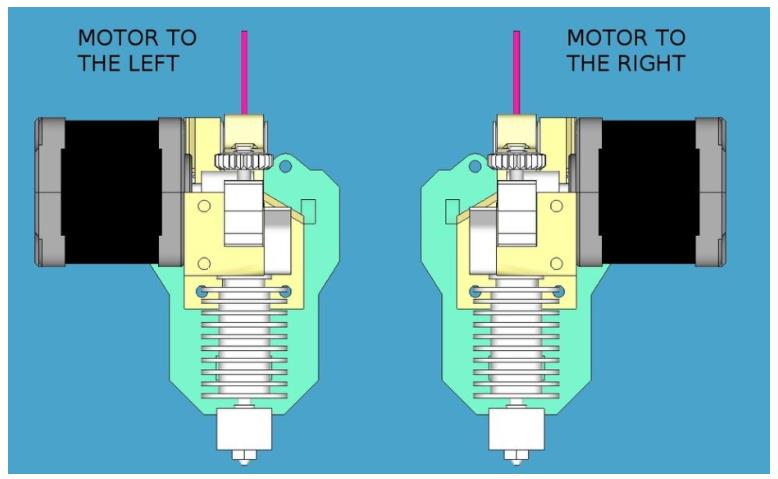
比如我们使用的齿轮驱动是MK8:
一般情况下MK8用的齿轮直径是11mm,那么齿轮旋转一周的周长就是:π * 11 = 3.14 * 11 = 34.54mm
我们先来回顾以下步进电机驱动n细分转动一圈所需的脉冲个数的计算方法:
步进电机驱动n细分转动一圈所需的脉冲个数 = 360° / 步距角 * 细分数
那么步进电机控制齿轮移动挤出耗材距离的脉冲个数计算方法如下:
耗材移动n毫米所需的脉冲个数 = (步进电机驱动细分转动一圈所需的脉冲个数 / 齿轮旋转一周的周长) * s(位移,单位为mm)
以步进电机驱动板细分数为16的来驱动步距角为1.8°的步进电机,然后控制MK8齿轮完成3D打印机耗材挤出,则计算方法如下:
耗材移动n毫米所需的脉冲个数 = (360° / 1.8° * 16) / ( π * 11) * 1mm = 3200 / 34.54 * 1mm = 92.64
往期精彩
点亮AliOS Things IOT开发板上的的OLED全彩屏
觉得本次分享的文章对您有帮助,随手点[在看]并转发分享,也是对我的支持。
以上是关于步进电机驱动在3D打印应用的学习笔记的主要内容,如果未能解决你的问题,请参考以下文章