激光SLAM技术总结V-LOAM算法测试( KITTI 数据集)上
Posted Techblog of HaoWANG
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了激光SLAM技术总结V-LOAM算法测试( KITTI 数据集)上相关的知识,希望对你有一定的参考价值。

1.PCL简介
The Point Cloud Library (PCL) is a standalone, large scale, open project for 2D/3D image and point cloud processing. PCL is released under the terms of the BSD license, and thus free for commercial and research use.
Whether you’ve just discovered PCL or you’re a long time veteran, this page contains links to a set of resources that will help consolidate your knowledge on PCL and 3D processing. An additional Wiki resource for developers is available at https://github.com/PointCloudLibrary/pcl/wiki.
Github代码仓库: https://github.com/PointCloudLibrary/pcl/releases
1.1 Getting Started
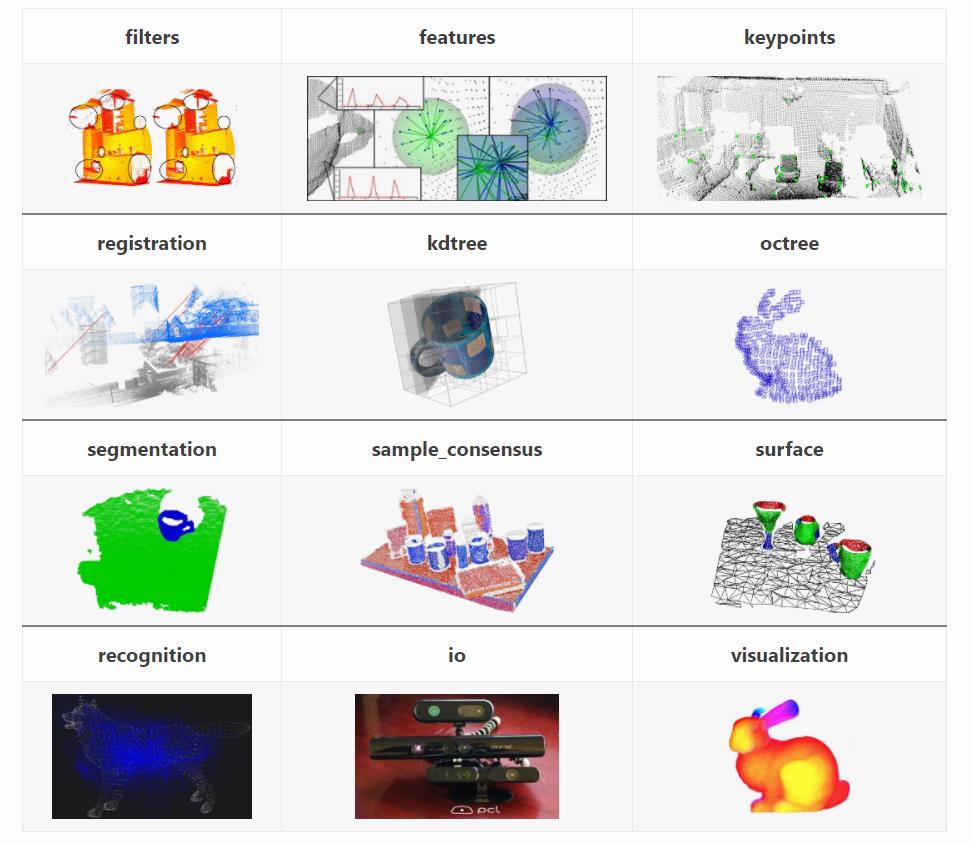
To simplify both usage and development, we split PCL into a series of modular libraries. The most important set of released modules in PCL is shown below.
1.2 技术文档
文档地址https://pcl.readthedocs.io/projects/tutorials/en/latest/
2. 源码编译PCL
切勿安装二进制pcl lib。
下载源码:https://github.com/PointCloudLibrary/pcl 选择版本1.9.1
cd pcl-pcl-1.9.1 && mkdir build && cd build使用Cmake build system:
cmake -DCMAKE_BUILD_TYPE=Release ..编译
make -j2 安装即可。
以上是关于激光SLAM技术总结V-LOAM算法测试( KITTI 数据集)上的主要内容,如果未能解决你的问题,请参考以下文章